博文
张文增:杨韵芳清华大学挑战杯特等奖作品不存在抄袭
|||
今天接到系里老师的电话和邮件,说网上有人指责清华大学机械工程系2012级本科生杨韵芳获得清华大学挑战杯特等奖作品——多自由度柔性仿象鼻机械臂(简称ET手臂)抄袭了德国Festo公司2010年的获奖项目。
我上网看了自称“周先生——一个资深自动化行业从业者”的这篇帖子(见附录1),其中,对方并未给出什么证据来指责抄袭,仅凭个人主观断定“二者基本原理一致,基本结构一致”,然后就非常迫不及待、草率贸然地得出“根本是赤裸裸的抄袭”这样不负责任的错误结论,并请网友去看两个作品的对比,认为网友自然会得出所谓抄袭的结论,并且网友“周先生”似乎将此帖子发到了“新语丝”,请方舟子先生打假。由于该网页被大量转载,可能引起了不少不明所以网友的错误认识,也可能影响到清华大学的声誉,因此,我作为杨韵芳的挑战杯项目指导教师,必须即时给出一个澄清,以避免更多人产生误会。我的结论是不存在任何抄袭!
我的回复如下:
1、德国费斯托(FESTO)公司于2010年12月14日申请了国际发明专利“可利用流体运行的操纵器”(US20120210818A1和CN201080057286.7),并研制了一种气动仿象鼻机械臂(简称气动象鼻手),并获得了“GERMAN FUTURE AWARD”(德国未来奖)。从网上公布的产品和专利的权利要求书(见附录2)所保护的范围来看,该Festo象鼻手是流体驱动的,必须有密闭的流体腔,而且要有良好的流体控制系统;而杨韵芳作品ET手臂是电机驱动的,采用柔性杆和螺杆来传动,无需流体腔,无需流体控制系统。二者从驱动原理、传动方式和必要组件上均完全不同。ET手臂完全不在Festo发明专利保护的范围内,也不是从Festo发明专利的装置上无需智力劳动显然就能够想到的。
2、杨韵芳ET手臂的发明过程中查阅过传统象鼻手方案(包括Festo象鼻手),前人的技术中的一些长期公知的基本原理完全是可供后人借鉴的,这与抄袭是无关的。正如站在巨人肩膀上,就是抄袭巨人吗?而且在挑战杯答辩的从始至终(初审答辩、二审函评材料、终审答辩)中,杨韵芳并不避讳谈到传统象鼻手已经有一些方案,在前言部分的技术背景介绍中,总是给出Festo象鼻手的图片,并明确地指出其采用气动方式带来的许多不足之处。
3、再来看看长期公知的一些基本原理。事实上,Festo公司的专利为何没有保护更大的范围,而必须限定在流体腔采用流体来驱动和传动,这是因为这些最基本原理并不是Festo的创新,试举几个基本原理:(1)“三点构成平面”,(2)“远程驱动减轻臂部重量”,(3)“通过绳索远程拉动某个点的位置来实现平面的驱动”,这些都是长期公知的基本原理,大量出现在传统机构中,人人皆可使用。
4、杨韵芳象鼻手作品已于4月申请了中国发明专利(专利的保护范围见附录3),并且在专利的技术背景部分明确指出了Festo象鼻手的不足之处:“由于空气压缩机体积庞大,所以整个系统占地面积大;另外该装置的结构复杂、成本昂贵;还存在气密性等问题,能耗也高。”
5、杨韵芳的ET手臂比Festo的象鼻手具有如下优点:制造成本低、维修成本低、体积小巧、重量轻、结构简单、控制容易、控制系统简单、控制算法简单、控制响应快等突出优点。
因此,我的结论是不存在抄袭。
附录1:网友质疑帖子
出处:http://blog.sina.com.cn/s/blog_ed98310a0101ph4t.html
原帖内容如下:
===========================
清华大学挑战杯特等奖作品竟然是抄袭德国FESTO公司10年的一个获奖项目(ZT)
在清华大学第32届“挑战杯”学生课外学术科技作品竞赛中,机械工程系大二学生杨韵芳的作品“多自由度柔性仿象鼻机械臂”获得了特等奖。但这个作品根本就是德国FESTO公司2010年的一个project,而且该project还获得了当年的“GERMAN FUTURE AWARD”。
对比这两个作品发现,二者基本原理一致,基本结构一致,根本是赤裸裸的抄袭。果壳网旗下的“万有青年烩”竟然给骗子封为什么“美少女机械师”来搞演讲,难道是要教这些学生怎么抄袭吗?
现在贴一下二者的链接,相信你会一目了然的。
http://www.tsinghua.edu.cn/publish/newthu/8913/2014/20140610091900695143637/20140610091900695143637_.html
http://my.tv.sohu.com/us/215525699/69935856.shtml
FESTO的链接:http://www.festo.com/cms/en_corp/9655_10218.htm#id_10218
周先生
一个资深自动化行业从业者
(XYS20140621)
本文摘自《新语丝》:http://www.xys.org/xys/ebooks/others/science/dajia15/qinghua.txt
===========================
附录2:Festo公司的流体象鼻手申请专利的保护范围
(1)Festo公司申请的发明专利US20120210818A1的主权项如下:
“1. A fluidically operable manipulatormade up of several manipulator segments stacked along an extension curve, eachcomprising at least one connecting plate and at least two fluidically connecting plate separated fluid chambers spaced apart on the connecting plateat right-angles to the extension curve, wherein each of the fluid chambers has at least one elastically deformablewall section which is designed to make possible,on pressurization of the respective fluid chamber with a fluid,a change in volume of the fluid chamber for a linear movement substantiallyparallel to the extension curve, and wherein a main extension surface of theconnecting plate is provided for an arrangement at least substantially atright-angles to the extension curve, and wherein the two or more fluid chambers are made integral with the connectingplate or plates. ”
(2)Festo公司申请的中国发明专利(与上述专利为等同专利,即内容是一致的)主权项如下:
“1.一种可利用流体运行的操纵器,其由多个沿着延伸曲线(10)以堆叠的方式布置的操纵器节段(5;70;80)形成,所述操纵器节段(5;70;80)分别包括至少一个联接板(19;73)和至少两个横向于所述延伸曲线(10)成间距地布置在所述联接板(19:73)处的在流体方面分离的方式构造的流体腔(20;71;81),其中,所述流体腔(20;37;71)的每一个具有至少一个可弹性地变形的壁区域(25;72),所述壁区域(25;72)构造成,在利用流体加载各个流体腔(20;37;71)时流体腔(20;37;71)的体积变化成为可能以用于基本上平行于所述延伸曲线(10)的线性运动,并且其中,所述联接板(19;73)的主延伸面(26)设置成用于至少基本上垂直于所述延伸曲线(10)布置,其特征在于,所述至少两个流体腔(20;71;81)与所述至少一个联接板(19;73)一起构造成单件。”
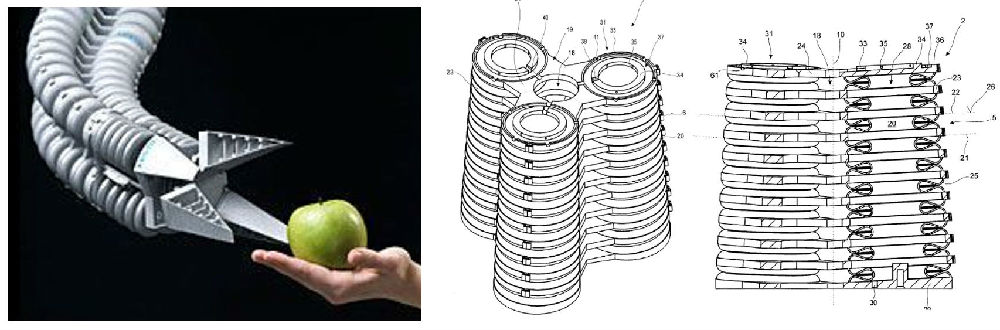
图1 德国Festo公司研制的仿象鼻机械臂及其发明专利附图
附录3:杨韵芳申请发明专利“一种仿象鼻机械臂单元装置”的保护范围
中国发明专利(申请号:201410171742.0)主权项如下:
“1、一种仿象鼻机械臂单元装置,其特征在于:包括基座(1)、至少2个人工肌肉组件、至少两个中间件(6)和一个末端件(8);所述人工肌肉组件包括驱动器(2)、传动机构(3)和柔性螺杆组件;所述柔性螺杆组件包括柔性杆(51)和螺杆(52);所述驱动器(2)与基座(1)固接,所述驱动器(2)的输出轴与传动机构(3)的输入轴相连,所述传动机构(3)的输出轴与柔性杆的一端相连,所述柔性杆(51)的另一端与螺杆(52)的一端相连;所述螺杆与末端件形成螺纹传动关系;所述中间件设置在基座(1)和末端件(8)之间,多个中间件(6)沿柔性杆方向依次布置,所述中间件(6)上至少有两个通孔,所述每个柔性杆(51)分别依次穿过各中间件(6)的通孔,相邻中间件(6)之间至少设置一个弹簧(7),所述弹簧(7)的两端分别连接两个相邻中间件(6)。”
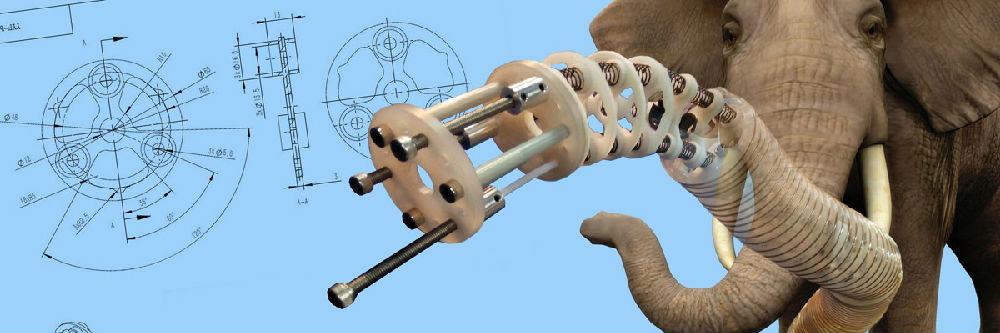
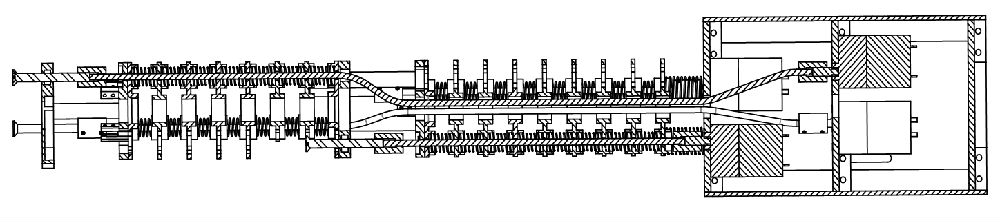
图2 杨韵芳研制仿象鼻机械臂及其专利附图
2014年6月23日
https://blog.sciencenet.cn/blog-288031-805885.html
全部精选博文导读
相关博文
- • Building a DIKWP-TRIZ Software System (初学者版)
- • DIKWP-TRIZ: Semantic Blockchain and Semantic Communica(初学者版)
- • DIKWP-TRIZ in 3-No Problem and Artificial Consciousnes(初学者版)
- • Comparison Between DIKWP-TRIZ and TRIZ(初学者版)
- • DIKWP-TRIZ: Enpower AI/AC Innovation (初学者版)
- • Optimizing TRIZ Principles within DIKWP-TRIZ(初学者版)