博文
[转载]光控微纳机器人引领精准“智“疗新时代|《光学学报(网络版)》暨南大学广东省纳米光学操控重点实验室专辑
|||
编者按
纳米光子学技术的迅猛发展正为生命科学领域带来前所未有的变革,尤其在生物光学微操控方面,光与物质相互作用的精密控制能力已成为推动精准医学和细胞学研究的重要引擎。本期暨南大学纳米光子学研究院/广东省纳米光学操控重点实验室专辑,聚焦“生物光学微操控”这一前沿方向,汇集3篇极具代表性的研究进展,集中展现光场调控技术在微纳尺度生命操控中的创新与应用潜力。本文来自暨南大学李宝军/辛洪宝教授团队的“光驱动微纳机器人在精准医学领域的应用进展”,被选为《光学学报(网络版)》封面文章。
封面解析:本期封面展现了光学控制微纳机器人在精准医学中的新进展和应用潜力。图中,微纳机器人可深入活体内复杂微环境,并在光学控制下精准定位靶向病变细胞或组织,实现精准检测与成像、定点药物递送以及精细的微手术与治疗等核心功能。光控微纳机器人作为突破传统医疗局限的关键工具,可将光学精准操控转化为精准干预治疗,助力精准医学在临床诊断与治疗领域的发展与突破。
文章链接:潘婷, 张欣, 辛洪宝, 李宝军. 光驱动微纳机器人在精准医学领域的应用进展(特邀)[J]. 光学学报(网络版), 2025, 2(18): 1816001.
01 背景介绍
21世纪以来,现代科技与生物医学的迅猛发展推动了精准医学的兴起,旨在实现“最大疗效、最小副作用”的诊疗目标。然而,传统医疗手段在微纳尺度上往往力不从心,如传统手术导管或器械难以到达活体内深层微小病变,常伴随不必要的创伤;药物和诊断探针在体内难以精准靶向病灶,治疗效果受限且副作用明显。
为了攻克这些难题,科学家们从自然界获取灵感,开发出人工微纳机器人。这些微米至纳米尺度的微结构可将外部能量转化为机械动能,实现自主运动与可控导航。其中,光驱动微纳机器人凭借其非接触、可精准调控的优势,成为精准医疗的重要突破方向。光作为一种可精确调控的信号,能实现高时空分辨率的非接触式操控;其能量来源清洁无污染,特别是近红外光,具有良好的组织穿透深度和较低的光损伤;同时,光还能作为信息载体,易于功能集成与智能化。暨南大学李宝军/辛洪宝教授团队综述了当前光驱动微纳机器人的研究进展,介绍其设计理念与驱动原理,重点归纳其在靶向递送、微创治疗、精准诊断与传感等方面的应用,并展望未来的发展方向与面临的挑战。
02 光驱动机制
光驱动微纳机器人的核心在于高效、可控的运动驱动。根据光能转化的不同机制,其运动控制方式可分为直接光学操控、生物光感驱动、光热驱动、光化学驱动和光致变形驱动五大类。
2.1 直接光学操控
代表技术包括光镊与光电镊,具有极高的操控精度和非接触特性,在单细胞操作和微观组装方面展现出巨大潜力。例如,光镊技术通过高度聚焦的激光束产生梯度力,可稳定捕获并操控微粒。研究人员利用光镊技术成功捕获并控制旋转衣藻细胞,构建出活细胞微机器人,能够在复杂生物环境中导航并输送药物颗粒、活的红细胞或游动细菌,展示出高度精准与无损的操控能力(图1)。
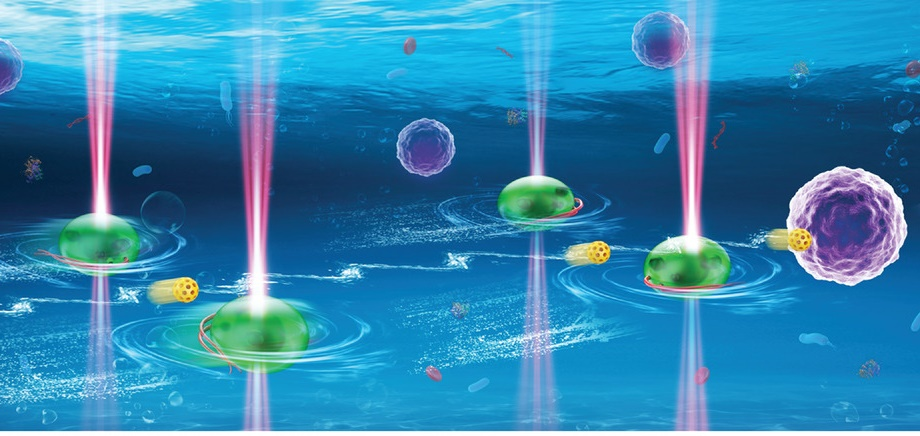
图1 基于光镊技术控制衣藻细胞的生物微机器人
2.2 生物光感驱动
自然界中,许多微生物天然具备光感行为,如趋光性绿藻可主动朝向光源移动。利用这些光响应微生物构建的微机器人,可实现天然驱动与良好生物相容性。例如,纤细裸藻因其高度变形能力和对蓝光的敏感性,被用于构建具有高环境适应性的软体生物微机器人,可适应复杂环境,通过狭窄或弯曲的微流通道完成自主穿越(图2)。

图2 生物光感驱动的软体生物微机器人
2.3 光热驱动
光热驱动型微纳机器人通过光热转换形成局部温度梯度,诱发热泳动等效应,进而实现运动调控。这类机器人通常采用不对称结构设计,并依赖具备高效光热转换特性的功能性材料,如金纳米颗粒、碳基纳米结构等,且大多采用近红外光作为激发光源,具有较好的生物组织穿透性,在靶向药物递送等方面展现出广阔前景。
2.4 光化学驱动
光化学驱动多由紫外光或可见光触发,借助光照激活光敏化学反应或光催化反应生成特定产物,从而引发非均匀浓度场和局部化学势梯度,进而驱动微纳机器人的定向运动。这类系统通常以光催化剂(如TiO₂、ZnO等半导体)为核心构建模块,具有运动速度快、稳定性高及方向可控等优势,尤其适用于高浓度反应底物环境下的短距离、高速运输任务。
2.5 光致变形驱动
光致变形驱动微机器人展现了柔性“变形金刚”的精准律动。这类机器人依赖光响应变形材料,如液晶弹性体(LCE),在特定光照条件下发生弯曲、伸缩等可逆形变,推动机器人动作。其具备高响应性与可编程性,能在空气和溶液中完成抓取、释放与蠕动等多种复杂动作,适用于软体机器人、生物组织操作与仿生驱动器等多场景需求。
03 精准医学应用
光驱动微纳机器人凭借其微小的尺寸、灵活的操控性以及对光信号的精准响应,能够克服传统医疗手段的局限,深入复杂组织,实现对病灶的精确识别、靶向递送和微创治疗,从而提升诊断精准度和治疗靶向性,降低对患者的创伤和副作用,在精准医学领域展现出独特优势。
其应用涵盖多方面,例如精准识别并清除体内外的有害生物聚集体,包括血栓、细菌和病毒等(图3a)。它们也能在体内实时监测生理指标和疾病标志物(图3c),例如高效捕获循环肿瘤细胞,或动态探测氧气、pH值,为早期诊断提供关键数据。在药物靶向递送方面,它们能克服高速血流和生物屏障,将药物高效、精准地递送至病灶区域,提高疗效并减少副作用(图3d)。此外,它们还能深入传统器械无法触及的区域,实现微创甚至无创的手术和治疗,如精准的激光手术操控、靶向清除肿瘤细胞,以及在神经调控和组织修复中提供精准刺激和引导(图3b),拓展“无创外科”的可能性。
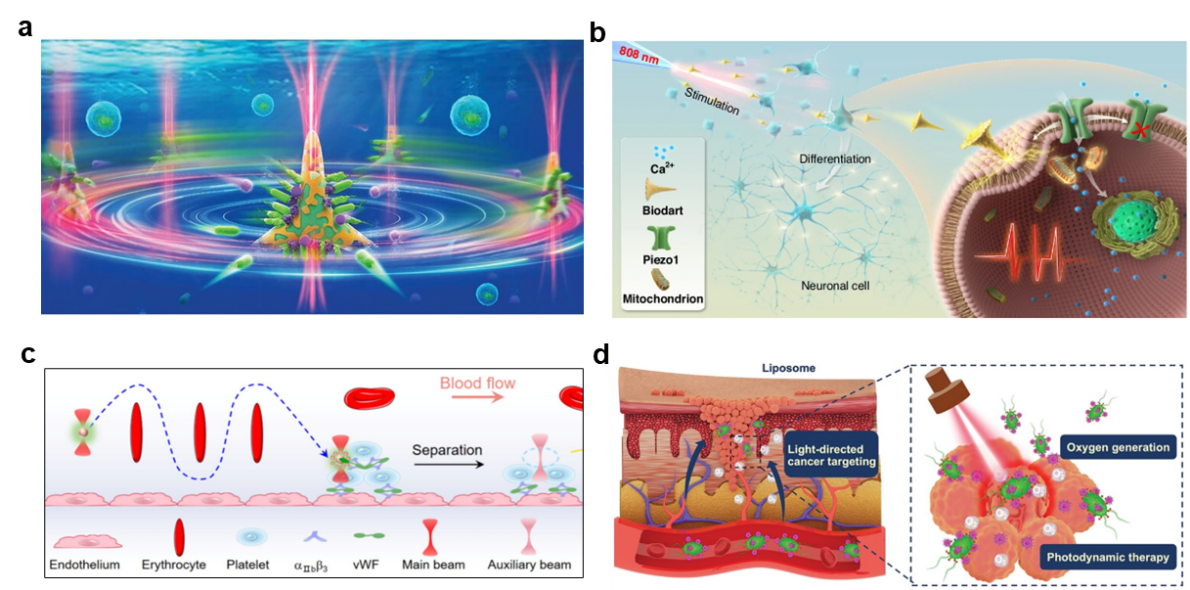
图3 光驱动微纳机器人在精准医学领域的应用。(a)生物威胁物清除;(b)亚细胞精度神经精准调控;(c)活体内精准生物传感;(d)靶向药物递送与治疗
04 总结与展望
自理查德·费曼提出“微型外科医生”的概念以来,智能微纳机器人正从概念逐步迈向技术实现。光驱动微纳机器人凭借灵活操控、高空间精度与非侵入特性,尤其适用于体内复杂微环境下的精准操作。然而,其距离实际临床应用仍面临不少挑战。首先是深层生物组织的光调控难题,目前光源穿透力有限且可能存在光毒性,未来需深入探索近红外二区光驱动材料与技术,并结合柔性光纤、双光子激发、组织透明化等先进光学技术,以实现深层组织中的稳定控制。其次是体内长期生物安全性,需提升机器人可降解性与免疫适应性,可借助天然细胞或宿主自源材料构建机器人系统。再者是智能化水平不足,需集成环境感知、状态识别与反馈控制功能,并借助人工智能实现集群协作、自主导航与任务决策。
尽管挑战重重,我们相信,随着新光学技术、材料与智能控制系统的发展,光驱动微纳机器人有望在精准医疗领域持续突破,助力“智”疗时代的真正到来。
文章转自:中国激光杂志社微信公众号(https://mp.weixin.qq.com/s/tR3bd9BK9E62MeIhPZdKFA)
https://blog.sciencenet.cn/blog-2083140-1507705.html
上一篇:[转载]弱发散代替紧聚焦,中红外光学参量技术取得新进展|深圳技术大学阮双琛教授、赵俊清副教授团队
下一篇:[转载]暨南大学李宝军/郑先创团队:活细胞变身“医疗微机器人” |《光学学报(网络版)》
