博文
自动控制与运行优化 1:定义及关系  精选
精选
|
系统辨识,才是工业智能的灵魂---朱豫才
对于流程工业,什么是自动控制,什么是运行优化(经济优化),以及控制和优化的关系,很多人没有搞清楚,包括不少控制专家。现在讲讲我的理解,但愿对同学们有帮助。
自动控制是指控制系统(通常是计算机)自动调节控制变量,如阀门、泵、风机、风门、流量设定值等,以控制被控变量,如温度、湿度、压力、液位、发电负荷、产品组分等。自动控制有多种功能。第一是替代人工操作,降低劳动强度,提高生产的安全性。第二是提高了装置运行的稳定性,降低干扰,从而间接提高产品收益且节能减排。一般来说,一个高品质的自动控制系统要比人工操作强三、四倍,即控制误差降70-80%,响应速度高200-300%。第三个功能是实现运行优化(经济优化)中的卡边优化,并执行寻优优化的结果。这里我说的卡边优化就是模型预测控制的卡边控制功能。为什么叫卡边优化与寻优优化下面马上解释。
运行优化是指通过调节一个或多个优化变量(我起的通俗名字,优化专家一般叫决策变量),使得的生产装置的经济效益最大化。这里经济效益一般是用所谓的目标函数(损失函数)来量化,对其极大(极小)化。
运行优化可分为两个类型:1)卡边优化,2)寻优优化。
卡边优化中,目标函数(损失函数)是优化变量的单调函数且方向已知。这中情况下,优化问题较简单,只要在装置稳定的条件下增加(降低)优化变量直到生产装置的某些约束变量触到其上(下)边界,即卡到边界。卡边优化是用模型预测控制器(MPC)来实现的,即卡边控制功能。PID控制器无法实现卡边优化。卡边优化的例子可以用发电机组主汽温控制来解释:主汽温越高,发电效率(目标函数)越高,但主汽温不能超过一个上限,否则会造成蒸汽管壁的损伤,这里主汽温是MPC的被控变量(CV)。另一个例子是常减压装置进料(即产量)最大化。这里进料是MPC的控制变量(MV),MPC对其最大化,直到某些约束变量(CV)触到其上(下)界。
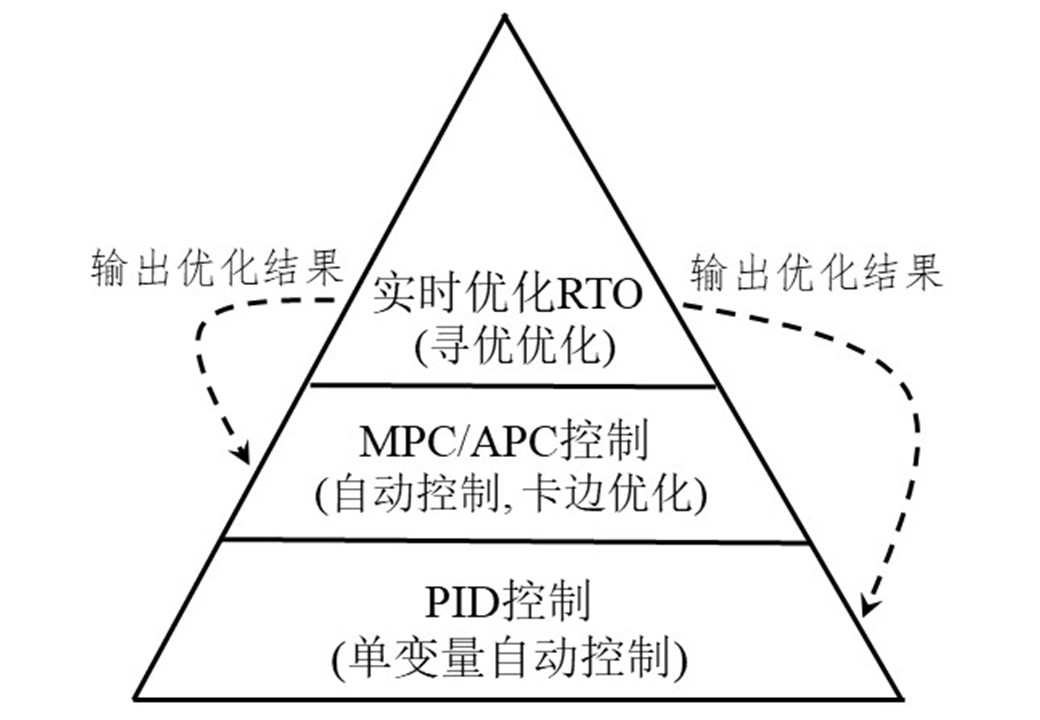
寻优优化中,目标函数(损失函数)是优化变量的非单调函数。目标函数(损失函数)有一个或多个峰(谷),寻优过程就是寻找这些峰(谷)。寻优优化的例子有:调节发电锅炉的气-燃料比(一般用烟气氧量衡量),以使锅炉燃烧效率最高(即燃耗最低);调节煤气化炉的氧煤比,以使有效气组分最高;调节母管制多个不同效率锅炉的负荷分配,以使总燃料消耗最小;调节风电场每台风机偏航角,以使风电场总发电量最大(也叫尾流优化);等等。对于这类问题,优化变量的最优值在其上下界中间的某个位置,要使用某种优化算法进行寻优找到其最优值,所以我叫它寻优优化。由于寻优优化是复杂的优化问题,一般是非线性规划,该功能块被命名为实时优化(RTO)层,位于PID控制层和MPC控制层之上。RTO的优化结果一般用MPC控制器来执行。如果优化变量是PID控制器被控变量的设定值,则可用PID控制器执行。
现在,我们可以用下面的金字塔描述PID控制层、MPC控制层和实时优化(RTO)层三者的关系。
下面问同学一个问题:如果寻优优化的优化变量(决策变量)对应的是MPC控制器的控制变量(MV),应该用工业MPC控制器的那个功能来实现优化结果?或者说,RTO应该把优化结果往哪里写,写到MV上对不对?
https://blog.sciencenet.cn/blog-862928-1451171.html
上一篇:一个观点是否正确,要看谁说的
下一篇:自动控制与运行优化 2:理想丰满的机理模型派