博文
[转载]可微分物理实现窄缝穿越
||
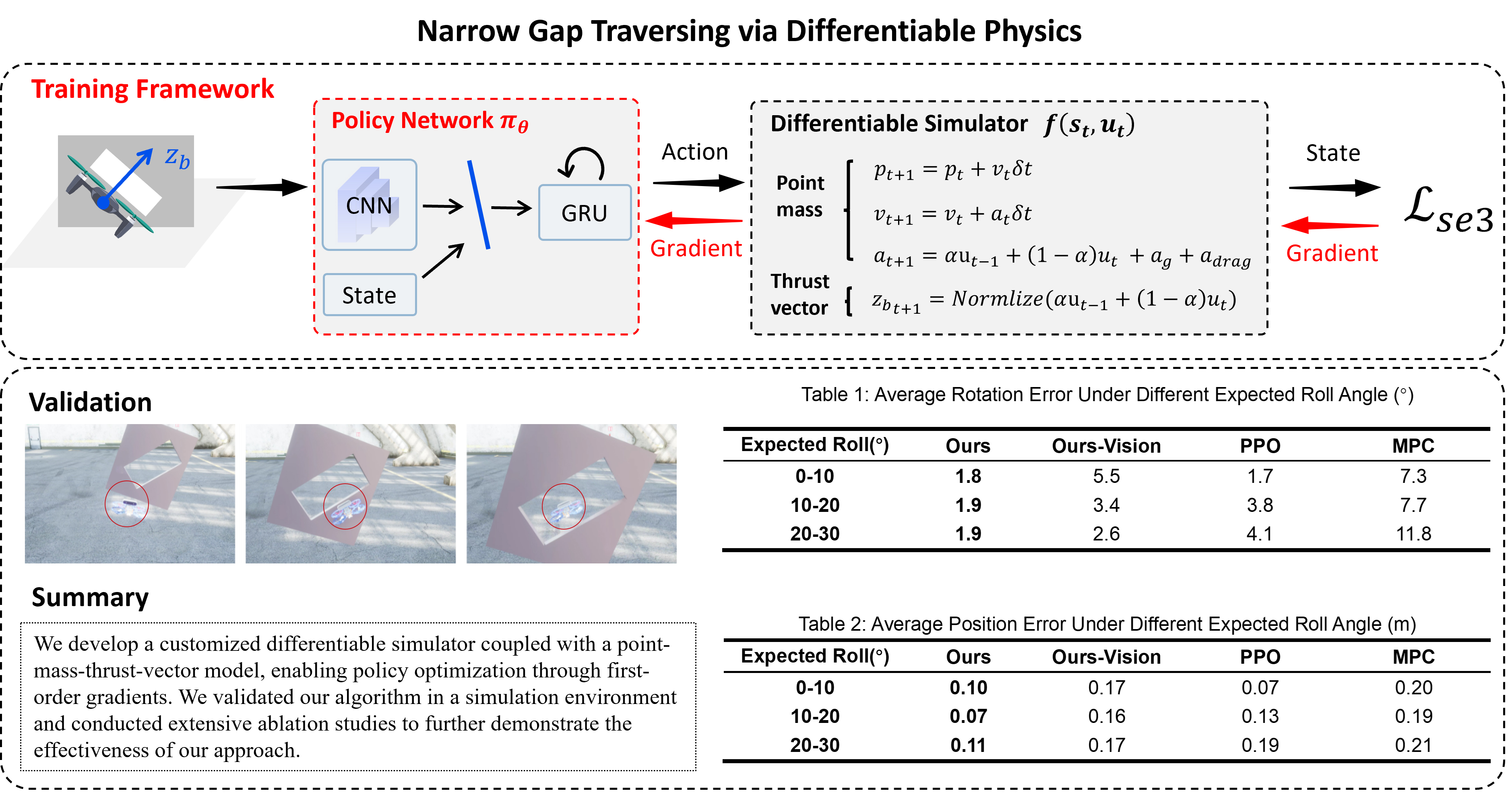
可微分物理实现窄缝穿越
胡瑜,邹丹平
(上海交通大学 自动化与感知学院,上海200240)
摘要:在无人机路径规划领域,穿越未知狭窄缝隙是一项重大挑战。现有研究多基于状态空间方法,且通常需要预知缝隙参数。近年来,机器人强化学习方法展现出巨大的潜力,但在处理SE(3)规划(三维特殊欧式群,描述包含平移和旋转的刚体运动)问题却略显疲态。其主要有两方面的挑战:SE(3)问题固有的约束使得难以采样到解空间,导致训练困难;无人机动力学、传感器数据的不同使得仿真-现实差异过大,阻碍策略迁移。为此,我们提出了一种新型四旋翼无人机SE(3)规划端到端系统;通过可微分模拟器结合点质量推力矢量模型,实现基于一阶梯度的策略优化。仿真环境验证了算法有效性,且消融实验进一步证明了方法的优越性。
关键词:SE(3),规划控制,可微分物理,深度学习
扫二维码浏览全文

Cite this article
Hu, Y., Zou, D. Narrow Gap Traversing via Differentiable Physics. J. Shanghai Jiaotong Univ. (Sci.) (2025). https://doi.org/10.1007/s12204-025-2888-3
https://blog.sciencenet.cn/blog-45888-1515899.html
上一篇:[转载]利用生物阻抗实现心肺信号同步分析
下一篇:[转载]DUAC-Net:融合双重注意力Transformer与自适应颜色校正的水下图像增强网络

扫一扫,分享此博文