博文
[转载]混合GNSS与GNSS-IMU因子图优化的定量评估
||
混合GNSS与GNSS-IMU因子图优化的定量评估
李一倩,何迪
(上海交通大学 北斗导航与位置服务上海市重点实验室;自动化与感知学院,上海200240)
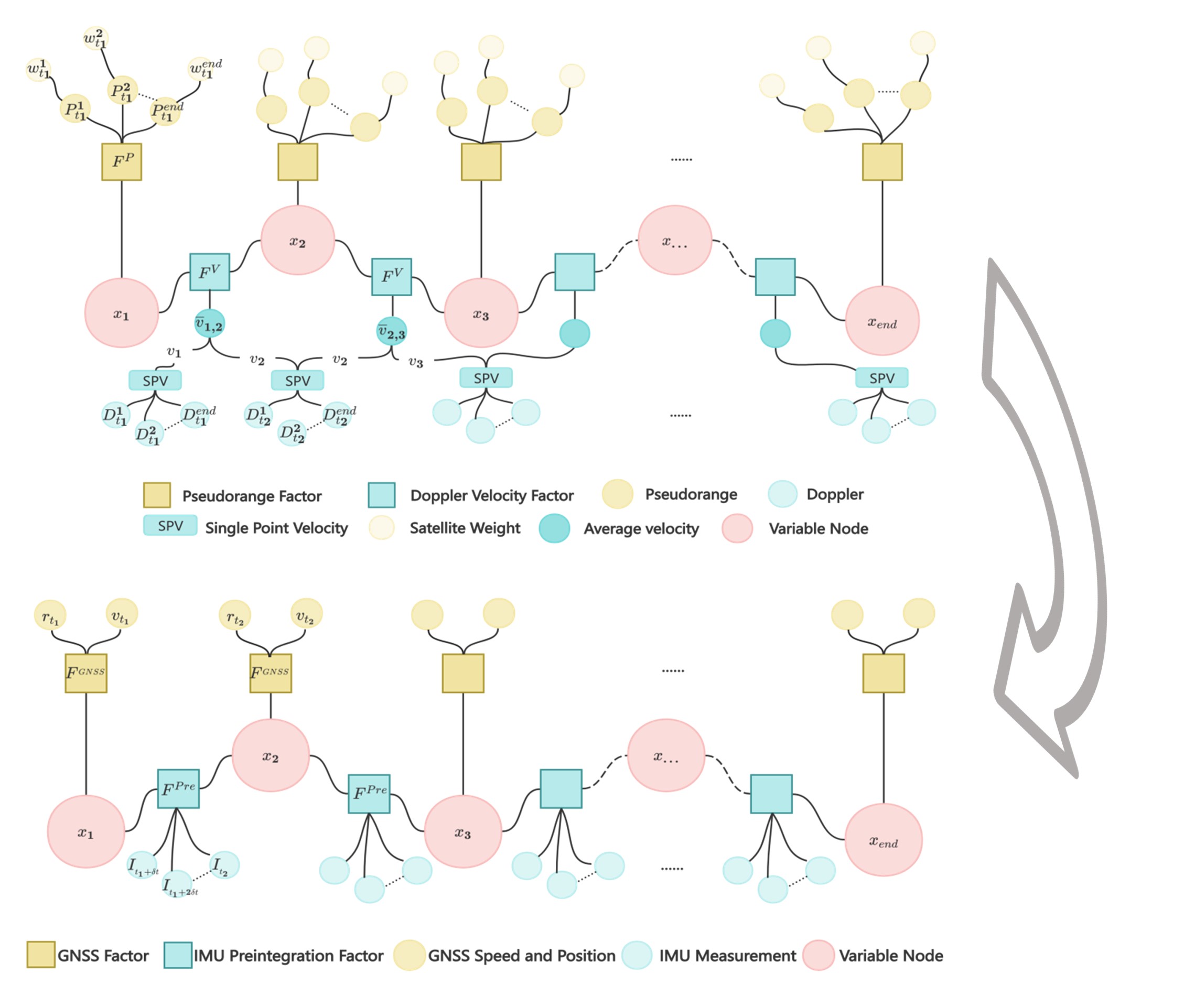
摘要:在卫星干扰环境下,传统的滤波方法很难有效地利用历史信息来维持稳定的定位结果。本研究提出了一种基于两步因子图优化的定位方法,利用北斗和GPS卫星系统的加权伪距测量和多普勒单点测速结果构建因子图节点,实现卫星定位结果。此外,这些定位结果可与惯性测量单元的预积分结果集成,形成新的因子图节点,提高定位可靠性。实验结果表明:与传统滤波方法相比,该方法在卫星单点定位和松耦合场景下都具有更高的定位精度;在人为卫星信号中断30秒的情况下,与单点定位结果相比,图优化松耦合方法的水平定位误差仍能减小0.2%,垂直定位误差减小32%,而传统滤波松耦合方法的误差分别增大8.4%和55%。
关键词:卡尔曼滤波,因子图优化,全球卫星定位系统,微机电系统,惯性测量单元,组合导航,卫星干扰环境
扫二维码浏览全文

Cite this article
Li, Y., He, D. Quantitative Evaluation of Hybrid GNSS-Only and GNSS-IMU Factor Graph Optimization. J. Shanghai Jiaotong Univ. (Sci.) (2025). https://doi.org/10.1007/s12204-025-2875-8
https://blog.sciencenet.cn/blog-45888-1513528.html
上一篇:[转载]MCMTNet:一种轻量级双流架构的高精度 WiFi 人体活动识别模型
下一篇:[转载]利用机器学习从智能手机GNSS数据构建二维建筑地图

扫一扫,分享此博文