博文
[转载]面向边缘设备的优化YOLOv11便携式无人机探测方法
||
面向边缘设备的优化YOLOv11便携式无人机探测方法
王红雨1, 党正1,石涵琦1,董广玉1,叶鸿源1,王睿2,崔明珠1
(1.上海交通大学 自动化与感知学院,上海200240;2. 浙江大学 控制科学与工程学院,杭州310058)
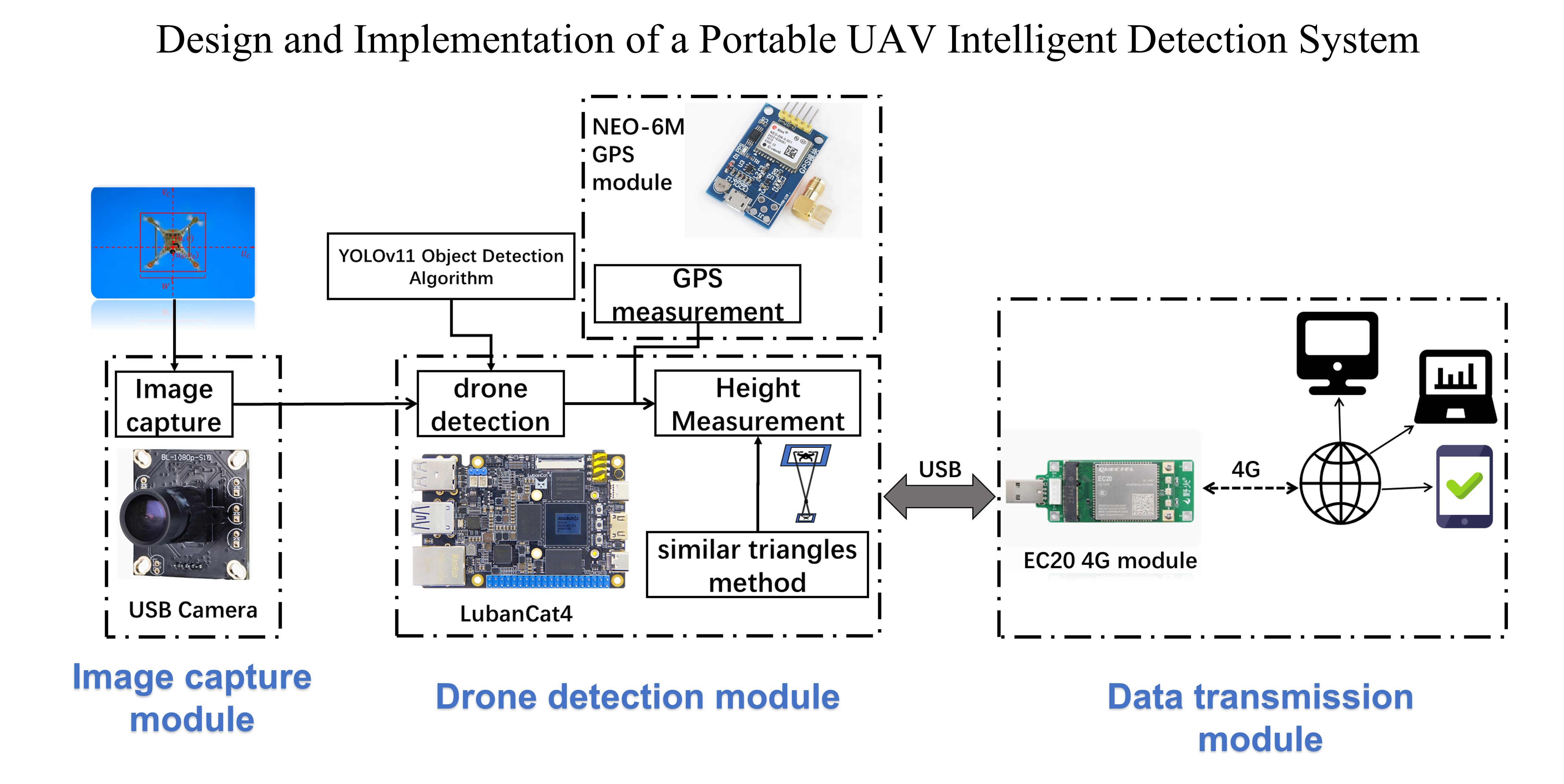
摘要:针对无人机反制领域中对无人机目标检测轻量化的需求,本研究提出了一种基于YOLOv11便携式无人机智能检测系统。该系统由无人机探测模块、数据传输模块和主站构成,旨在实现无人机的精准探测、实时定位与数据传输。系统的核心部分是无人机探测模块,其包括USB摄像头、鲁班猫4开发板、GPS模块和一个4G硬件单元,具备图像捕捉、无人机目标检测、目标测高及实时定位等功能。具体工作流程为:USB摄像头捕捉图像并传输至鲁班猫4开发板,基于YOLOv11算法对图像进行无人机目标检测,输出目标的边界框位置、置信度等信息;结合目标边界框的宽度、摄像头焦距、像素尺寸等数据,通过相似三角形法进行无人机飞行高度测量;GPS实时定位自身经纬度并发送至开发板。最终,通过EC20 4G模块将无人机检测信息与GPS定位数据上传至主站,实现数据远程传输。该系统具备高效、精准的无人机探测与实时数据传输能力,适用于各种无人机监控应用。
关键词:YOLOv11,无人机探测,实时定位,数据传输,鲁班猫4开发板
扫二维码浏览全文

Cite this article
Wang, H., Dang, Z., Shi, H. et al. Portable Drone Detection with Optimized YOLOv11 for Edge Devices. J. Shanghai Jiaotong Univ. (Sci.) (2025). https://doi.org/10.1007/s12204-025-2870-0
https://blog.sciencenet.cn/blog-45888-1510188.html
上一篇:[转载]用于实现卓越定位性能的混合单/双频精密单点定位模型
下一篇:[转载]磁性仿生纤毛阵列实现微流体的动态调控