博文
东南大学滕皋军院士、芮云峰、王乾乾教授等综述:肌肉骨骼系统中的微机器人  精选
精选
|
研究背景
肌肉骨骼系统疾病是全球疾病负担的主要因素之一,目前的治疗方法效果有限。患者饱受慢性疼痛的袭扰,当严重影响生活质量时可能需要接受终末期手术。因此,未来治疗策略应侧重于早期诊断和干预局部的微小病变。微机器人因其智能、精准和微创介入等优势,已被逐渐应用于生物体内的靶向递送。通过控制和成像系统的结合,可以将具有良好生物安全性的微机器人运送到所需区域进行治疗。在肌肉骨骼系统中,微机器人主要被用于运输干细胞/药物或在体内清除有害物质。与传统的生物材料和组织工程策略相比,主动运输提高了细胞/药物局部靶向的效率和渗透性。本综述讨论了微机器人系统在肌肉骨骼系统不同组织中的前沿应用。通过评估不同微机器人的特点,总结了阻碍其临床转化的挑战与障碍,并指出了微机器人在肌肉骨骼系统中的未来发展方向。
Delivering Microrobots in the Musculoskeletal System
Mumin Cao, Renwang Sheng, Yimin Sun, Ying Cao, Hao Wang, Ming Zhang, Yunmeng Pu, Yucheng Gao, Yuanwei Zhang, Panpan Lu, Gaojun Teng*, Qianqian Wang*, Yunfeng Rui*
Nano-Micro Letters (2024)16: 251
https://doi.org/10.1007/s40820-024-01464-8
本文亮点
1. 系统回顾肌肉骨骼系统中微机器人的最新进展,重点介绍用于组织再生的微机器人系统的设计策略。
2. 根据最新研究,回顾了肌肉骨骼系统中微机器人的制造、驱动和控制以及影像引导下递送。
3. 讨论了肌肉骨骼系统和再生医学中微机器人未来临床转化的前景和挑战。
内容简介
肌肉骨骼系统由骨骼、肌肉、软骨、肌腱、韧带和其他结缔组织组成,这些结缔组织将器官相互连接,为身体提供形态支撑、稳定性和运动功能。肌肉骨骼系统疾病包括肌少症、骨折、骨质疏松症、骨关节炎、肌腱/韧带损伤以及各种急性或慢性解剖疾病,其特征是肌肉质量和力量下降、骨脆性增加、软骨弹性下降以及肌腱/韧带弹性降低。随着组织工程和再生医学的发展,越来越多的治疗技术应运而生,包括干细胞、生物材料、外泌体、基因治疗等。目前最具前景的治疗是干细胞移植,然而干细胞的低靶向效率、细胞活力和功能受损以及移植后无法获得正确的细胞系,导致干细胞使用剂量较大却治疗效果不佳,大大限制其应用。微机器人是尺寸从纳米到亚毫米的微纳机器,已被开发用于干细胞和其他药物的介入微创、智能靶向和适应性递送,不仅提高了治疗效率还避免不良副作用。微机器人的驱动通常是通过将不同形式的能量转化为机械能来实现,包括化学驱动(基于过氧化氢/酶的反应)、物理驱动(磁、光、电和声驱动)以及生物驱动(基于细菌/真核细胞的驱动)。主动运动赋予了微机器人提高微创、靶向治疗效率的潜力。微机器人在肌肉骨骼系统中的优势主要体现在微创干预、精准输送、实时监测和远程调控等方面。
在这篇综述中,东南大学滕皋军院士、王乾乾、芮云峰等人首先介绍了肌肉骨骼系统和再生医学的特点以及常见的肌肉骨骼疾病、治疗策略和当前的挑战。此外,本文还全面讨论了应用于肌肉骨骼系统的微机器人的最新进展及微机器人相关的驱动和成像系统(精确控制、实时监控和术后跟踪)。最后展望了当前用于肌肉骨骼系统的微机器人未来发展的局限性和挑战。
图文导读
I 应用于肌肉骨骼系统的微机器人的特点
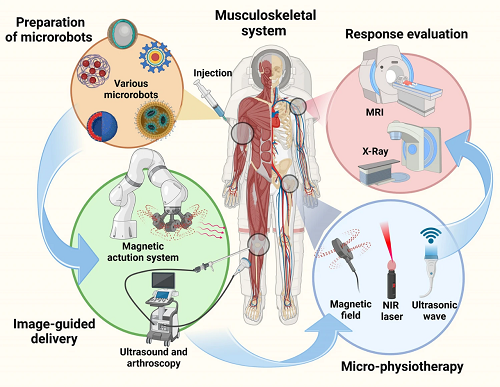
目前,微机器人在肌肉骨骼系统中的主要应用体现在以下两个方面:(1)作为干细胞/药物递送系统,通过精准靶向输送外源性细胞或调控内源性细胞发挥再生功能;(2)作为组织损伤的“清道夫”,通过将有害物质转化为有益物质来改善组织损伤的病理微环境(图1)。
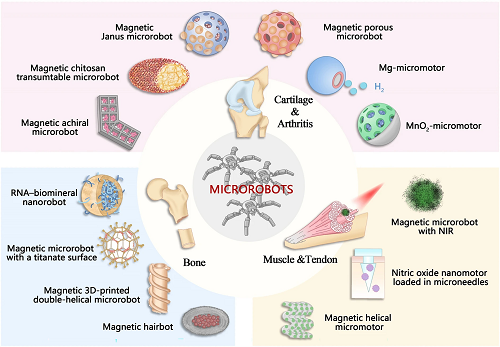
图1. 应用于肌肉骨骼系统的微机器人的特点。图中显示了用于治疗骨骼、软骨、肌肉和肌腱疾病的微机器人。
II 肌肉骨骼系统与再生医学
肌肉骨骼系统由骨骼、肌肉、软骨、肌腱和其他结缔组织组成。这些组织不仅支撑人体和保护内脏器官,而且还精确控制和维持运动功能。在微观层面上,骨骼和肌肉组织还具有内分泌功能,共同维持生物体的稳态。在世界范围内,肌肉骨骼系统疾病已成为导致残疾的第二大关键因素,过去十年间发病率增长了近20%。
由于肌肉骨骼系统中各组织特点不同,相应的治疗策略需要考虑特定组织的自愈能力。随着早期干预理念和再生医学的出现,干细胞、生长因子、生物材料和基因编辑等技术,被用来改善病理环境或增强损伤组织的再生能力。干细胞治疗是当前最具潜力的治疗手段之一,虽然目前干细胞治疗显示出积极的作用,但尚未达到预期。这可能是由于靶向效率低,细胞活力下降,体内移植后未精确调控分化。这些不足导致了需要高剂量和重复注射干细胞。因此,以微创方式靶向输送和精准调控干细胞/药物对于早期难治性肌骨疾病至关重要。基于微机器人的靶向递送系统可能有望解决目前肌骨系统中干细胞/药物递送的关键问题。图2显示了肌肉骨骼系统的四种常见难治性疾病及其目前的治疗方法。
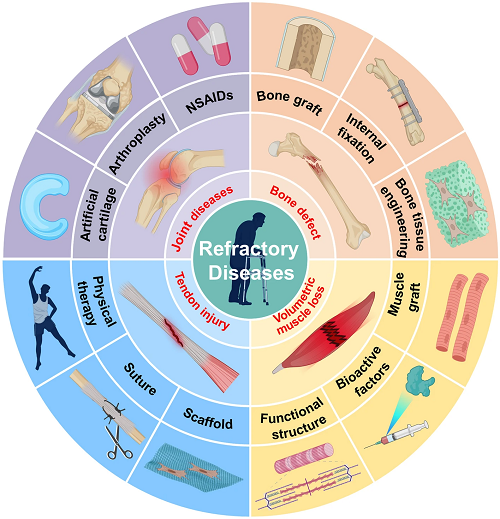
图2. 肌肉骨骼系统的四种常见难治性疾病及其当前治疗概况。
III 应用于肌肉骨骼系统的微机器人
为了实现干细胞和其他药物的微创、靶向、智能和适应性递送,以进行MSD的精确治疗,需要考虑微机器人的几个基本组成部分,包括核心材料、驱动/导航系统和成像/跟踪系统。
首先,核心材料在体内应用时必须是有良好的生物安全性。此外还要能响应物理或化学刺激,使微机器人具有主动运动的能力。对于细胞递送的微机器人,还需要为干细胞的粘附、生存、增殖和功能维持构建合适的三维微环境。其次,微机器人的靶向递送需与驱动系统相协调。例如,电磁驱动系统可以产生梯度场、振荡场或旋转场,以驱动微机器人的各种运动,尤其是三维复杂环境中的群体运动。最后微机器人的定向追踪也是不可缺少的。当前微机器人的体内成像包括x射线,计算机断层扫描(CT)、磁共振成像(MRI)和荧光成像等。
肌肉骨骼系统的不同组织(骨、软骨、肌肉、肌腱)既相互联系又相互独立。不同的组织具有不同的修复机制和自我修复能力,因此微机器人在每个组织中的应用重点是不同的,需要分开讨论。图3展示了微机器人在肌肉骨骼系统中四种主要组织在微机器人制造(生物相容性)、体外/体内驱动及成像和疗效评估等方面的应用。
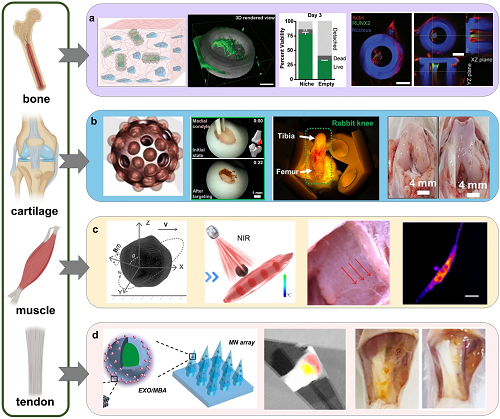
图3. 微机器人在肌肉骨骼系统中的典型应用。(a)螺旋微载体提高了干细胞的活力和成骨分化;(b)在关节镜下体内靶向递送多孔球形微机器人修复软骨缺损;(c)在磁场和近红外存在下的精确刺激刺激的微游泳器;(d)负载纳米马达的微针提高了EXOs治疗跟腱病变的效率。
IV 应用于软骨修复的微机器人
节软骨是一种高度结缔组织,在骨骼之间起润滑、减少摩擦和分解力的作用,目的是防止关节内磨损和促进运动。关节软骨损伤和骨性关节炎是临床上导致中老年人慢性残疾的主要原因。根据世界卫生组织的数据,全球60岁以上的人群中,约有9.6%的男性和18%的女性患有软骨病变,这导致了巨大的医疗费用和沉重的社会负担。由于缺乏血管和神经,关节软骨表现出极低的再生能力,并且目前没有可用的药物或治疗方法能有效延缓或逆转软骨损伤和骨关节炎的进展。
随着组织工程和再生医学的出现,研究者们尝试通过药物、生物活性因子或干细胞的结合或不结合生物材料来改善内源性细胞的病理微环境,增强关节软骨损伤的再生能力,从而促进软骨早期修复,避免晚期手术。例如,关节注射和基于生物材料的间充质干细胞递送在骨关节炎或软骨缺损患者中显示出缓解疼痛、促进软骨修复和改善关节功能的潜在作用。然而,干细胞活力低且持续时间短,分化能力未被利用,靶向效率低等原因限制了干细胞的治疗效率。如何微创、精准、智能地递送干细胞或其他生物活性物质,有效地改善软骨修复仍然是一个巨大的挑战。近年来,由于膝关节腔的天然空间的存在,具有侵入性小、运动主动、多功能、高安全性和适应性等特点的微机器人被广泛应用于软骨修复中,这为软骨疾病的治疗提供了新的视角,如图4所示。
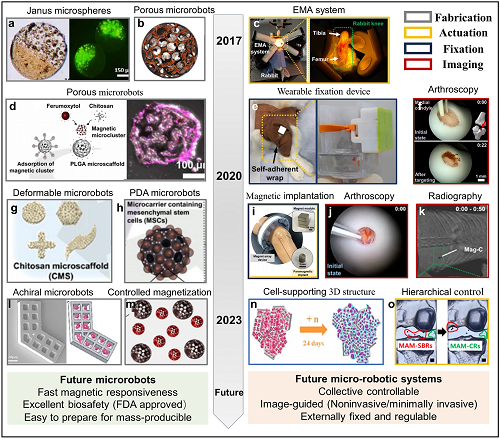
图4. 应用于软骨修复的微机器人系统的发展及未来展望。(a)Janus微球一半负载干细胞,一半负载磁性颗粒;(b)磁性PLGA微机器人;(c)EMA系统在靶向兔软骨损伤中的应用;(d)负载干细胞的多孔微机器人的示意图和共聚焦图像;(e)固定在兔膝和模型上的可穿戴磁固定装置;(f)关节镜引导下微机器人在软骨缺损的靶向递送;(g)不同应用场景下具有可编程形态的微机器人;(h)PDA包被的微载体;(i)由磁性模块组成的可穿戴式磁阵列设备;(j)关节镜引导下的微机器人输送;(k) X射线引导的微机器人递送;(l)二维非手性华夫饼形微游泳器;(m)用于软骨和软骨下骨修复的不同大小和磁化强度的微机器人;(n)微游泳器组装形成细胞支持的三维结构;o微机器人依次移动到软骨下骨和软骨缺损处。
V 基于微机器人系统的细胞/药物递送
1. 肌肉骨骼系统中微机器人的驱动与控制
驱动技术是微机器人运动的关键。根据动力源的不同,微机器人的运动模式分为自驱动和外部动力驱动两种。自驱动运动一般指化学推进,包括气泡产生、自扩散电泳、自电泳和马兰戈尼效应推进,而外部驱动运动包括磁驱动、声驱动和光电驱动。微机器人的运动可以根据治疗不同疾病的实际需要进行设计。图5展示了微机器人在肌肉骨骼系统中的运动演变,包括无外部控制的运动、特定方向的运动、复杂环境中的运动以及3D模型中的靶向运动。
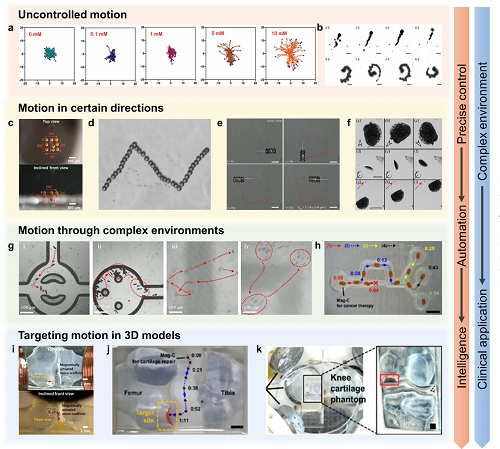
图5. 微机器人的不同运动模式。(a)浓度依赖的自主扩散;(b)化学反应驱动的线性和螺旋运动;(c)梯度磁场中的横移运动;(d)微游泳器沿预先设计的“N”轨迹运动;(e)旋转磁场下螺旋微机器人的螺旋推进;(f)毛发机器人的旋转、滚动和平移;(g)通过滚动和游泳运动模式的结合在复杂的通道中运动;(h)狭窄通道定向输送;(i-k)三维膝关节模型的靶向递送。
2. 微机器人递送系统的成像引导
成像系统与驱动系统是相互配合,紧密相连的。目前在肌肉骨骼系统中的微机器人研究大多停留在体外实验阶段。因此,大多数研究都致力于微机器人的制造或操作系统的升级,而没有考虑体内成像。由于微机器人具有微创靶向特性,因此更需要设计良好的成像系统来实时指导它们的运动。图6显示了成像引导给药系统从体外到体内肌肉骨骼系统的逐步完善。
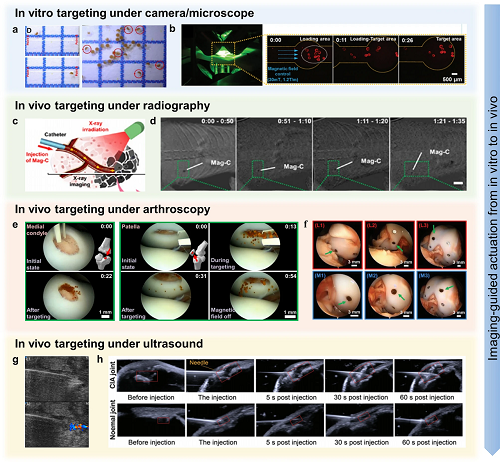
图6. 从体外到体内的成像引导下微机器人递送。(a)摄像机记录的微球的运动;(b)荧光显微镜记录的微机器人运动;(c)X射线引导的微机器人递送示意图;(d)大鼠胸腔内微机器人运动的X线成像;(e)关节镜下靶向递送;(f)关节镜下的磁性植入物靶向系统;(g)超声下毛发机器人成像;(h)自驱动纳米电机扩散的超声成像。
VI 总结与展望
肌肉骨骼系统和再生医学是现代医学中具有重要前景的领域。近十年来,随着微纳制造和控制技术的不断发展,微机器人在生物医学领域的应用前景无可比拟。本文综述了微机器人在肌肉骨骼系统中的应用,重点介绍了微机器人的设计、驱动机构和装置、跟踪成像系统以及在体内的应用。与传统的治疗方法和组织工程不同,微机器人系统具有精确定位、实时成像和远程调节的特点。为了推进微机器人在肌肉骨骼系统的临床转化,应着重攻克以下几点关键问题: (1)使用经FDA批准的生物相容性和临床安全的材料;(2)通过更好的控制系统提高药物/细胞靶向和固定的效率;(3)需要成像系统来监测递送效果以及支持给药后疗效评估;(4)开发靶向固定后原位调节策略,包括磁诱导、生物活性因子协同治疗和光热治疗;(5)发明一种临床适用的可移动多自由度无线驱动/控制系统。
微机器人已经逐渐从未来前沿技术向临床实践靠拢。未来,来自临床医学、机械工程、材料科学和生命科学领域的研究人员将齐心协作并专注于当前核心问题,以推进微机器人系统在肌肉骨骼系统和再生医学中的临床转化。
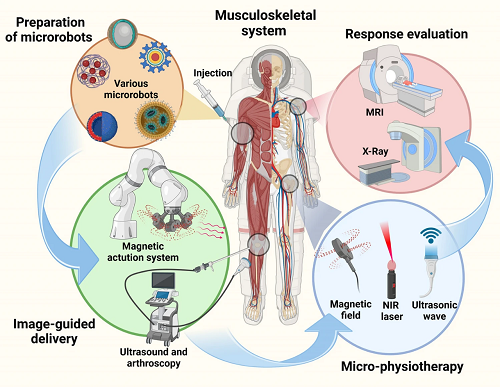
图7. 未来微机器人系统在肌肉骨骼系统中的临床应用示意图。
作者简介

滕皋军
本文通讯作者
东南大学 教授
▍主要研究领域
介入诊疗与分子功能影像学。
▍个人简介
中国科学院院士,中国医学科学院学部委员,东南大学医学与生命科学部主任,东南大学附属中大医院院长兼介入诊疗中心主任。从事医学影像与介入治疗临床工作 40 余年,发明和创制多项介入新器械、新技术及新理论,包括建立放射粒子支架的相关技术与理论,提高了中晚期食管癌、肝胆恶性肿瘤等疾病的临床疗效;阐明肝内门腔静脉分流术(TIPS)支架再狭窄机制,为新型支架介入分流术治疗门静脉高压症奠定基础;发现多个分子影像和功能影像新靶点,丰富了相关疾病的机制解析和诊疗方法。获国家科技进步二等奖 3 项,国家教学成果二等奖 1 项。担任国家产教融合介入医学工程创新平台负责人,国际介入与多学科肿瘤学会(ISMIO)创始主席,中国医师协会介入医师分会会长,中国医院协会影像中心分会主任委员,《EngMedicine》创刊主编等。获美国、欧洲及亚太三大主流介入学会最高荣誉奖、中国医师奖、卫生部有突出贡献中青年专家等荣誉。
▍Email:gjteng@vip.sina.com

王乾乾
本文通讯作者
东南大学 教授
▍主要研究领域
(1)小尺度机器人学;(2)微机器人集群系统;(3)磁控医疗设备的研发与应用探究;(4)磁驱动的动态自组装及微操作;(5)柔性多模态微小型机器人。
▍个人简介
东南大学青年首席教授、博士生导师。现任机械工程学院副院长,机器人系主任(兼)。首批小米青年学者,MINE优秀青年科学家奖获得者。主持承担国家自然科学基金、江苏省科技计划项目等多项科研项目。近年来发表高水平一作/通讯论文20余篇,包括Science Robotics,Science Advances, ACS Nano, IEEE Transactions,多篇文章入选ESI高被引论文及ESI热点论文;在IEEE ICRA、IEEE/RSJ IROS 等机器人领域国际知名会议中发表多篇论文并做报告和主题研讨;研究成果得到Nature News、东南大学、香港创新科技署等国内外科研院所和专业机构的广泛报道。担任IEEE Transactions、IEEE IROS等多个专业期刊及国际会议的副编辑、客座编辑和审稿人,任《机械工程学报》、《极端制造》(IJEM)等期刊青年编委,出版 Springer、Taylor&Francis 英文专著2部。主要研究方向包括微纳机器人学、微机器人集群系统及磁控医疗装备的研发与应用。
▍Email:qqwang@seu.edu.cn

芮云峰
本文通讯作者
东南大学 教授
▍主要研究领域
(1)肌腱相关疾病的临床及基础研究;(2)干细胞的靶向递送和精准调控;(3)老年髋部骨折的临床研究。
▍个人简介
东南大学教授、主任医师,博士生导师、博士后合作导师,南京医科大学(兼职)博士生导师。香港中文大学博士、博士后。现任东南大学附属中大医院骨科行政副主任,东南大学医学院院长助理、临床技能中心主任、外科学系副主任,东南大学创伤骨科研究所副所长。从事严重多发创伤、老年骨创伤和急慢性肌腱损伤的临床与科研工作20余年。兼任江苏省医师协会第三届理事会理事、江苏省老年医学学会常务理事、江苏省老年医学学会老年骨科学分会主任委员、江苏省医学会创伤医学分会副主任委员、江苏省医师协会骨科医师分会创伤学组副组长。主持各级、各类课题20余项,其中国家自然基金项目3项。发表本专业相关学术论文170余篇,其中第一、通讯作者论文100余篇,SCI收录60余篇。受聘为《Journal of Orthopaedic Translation》、《中国修复重建外科杂志》等4个国际/国内学术杂志编委。主译《老年骨科学》,主编《创伤骨科手术病例精要》,参编《老年髋部转子间骨折》(第二版)。
▍Email:ruiyunfeng@126.com
撰稿:原文作者
编辑:《纳微快报(英文)》编辑部
关于我们

Nano-Micro Letters《纳微快报(英文)》是上海交通大学主办、在Springer Nature开放获取(open-access)出版的学术期刊,主要报道纳米/微米尺度相关的高水平文章(research article, review, communication, perspective, highlight, etc),包括微纳米材料与结构的合成表征与性能及其在能源、催化、环境、传感、电磁波吸收与屏蔽、生物医学等领域的应用研究。已被SCI、EI、PubMed、SCOPUS等数据库收录,2023 IF=31.6,学科排名Q1区前3%,中国科学院期刊分区1区期刊。多次荣获“中国最具国际影响力学术期刊”、“中国高校杰出科技期刊”、“上海市精品科技期刊”等荣誉,2021年荣获“中国出版政府奖期刊奖提名奖”。欢迎关注和投稿。
Web: https://springer.com/40820
E-mail: editor@nmlett.org
Tel: 021-34207624
https://blog.sciencenet.cn/blog-3411509-1453212.html
上一篇:NML文章集锦| 小分子有机物电催化氧化
下一篇:清华任天令、山大韩琳等综述:过渡金属硫化物晶体管的性能极限及研究进展
