博文
【精选好文】服务机器人物品归属关系学习新策略
||
随着服务机器人不断融入人们的日常生活,用户对机器人的个性化服务也提出了越来越高的要求。过去我们会让机器人"拿一个杯子",现在我们会说"拿我的杯子",这要求机器人不仅有能力识别人和物体,更要知道哪个杯子是"我的",小小的言语变化却给机器人出了大大的难题。山东大学田国会教授团队为机器人构建了一个简单且高效的自主学习框架,帮助它们在真实环境中学习人们所穿所持物体的归属关系,大大提升了机器人的"服务质量和水平"。相关成果已在线发表于IJAC。

全文下载:
https://link.springer.com/article/10.1007/s11633-019-1206-7
http://www.ijac.net/en/article/doi/10.1007/s11633-019-1206-7

设定机器人个性化服务旨在满足不同用户更多具体多样的需求。随着时代的发展,机器人所要完成的服务任务从"拿东西"升级成了"拿某个人的东西",即构建出人与个人物体(exclusive objects)之间的归属关系(ownership relationship),学习这种归属关系对服务机器人而言至关重要。

现今,识别个人所属物体(human carrying articles)主要是识别手持的物体(hand-held objects)。此前,大多数手持物体识别数据集(human hand-held object recognition)都是基于第一人称(first-person perspective)视角建立。不同的是,本研究在机器人身上安装了摄像机,以第二人称的视角(second person perspective)捕捉实时(in real time)画面,镜头的角度(angle of the shot)未固定,且需要解决遮挡问题(occlusion problem)。
纵览前人研究,Hsieh等学者借助密码本技术(code book technique),提出一种全新的比率直方图(ratio histogram)以找出重要的色坐标(important color bins),从而定位手持物体(locate handheld objects)及其轨迹(trajectories)。Lv等学者基于异构特征融合(heterogeneous feature fusion),提出RGB-D手持物体识别方法(RGB-D handheld object recognition method),能够完成与本研究相似的任务。在开放、动态的真实环境中(open-ended and dynamic real-life environment),Li等学者搭建了一个手持物体识别系统(handheld object recognition system),在机器与人的交互过程中,机器人的识别能力可以不断得到提升。
但是,上述方法中,人始终保持着标准的站姿或坐姿(standard stance or sitting position),这并不适用于复杂的现实环境。近期,不少学者可实现人类服装分析(human clothing parsing),给本文研究提供了参考。然而,当前尚没有对全身物品进行状态识别的研究,人及其物品之间(human and their carrying articles)归属关系(attribution relationship)的学习也是一个新的研究课题。本文把识别任务提升到涉及语义关系(semantic relationship)的实例水平(instance-level),将更加契合用户对机器人提出的任务要求,具有更高的实用价值。
基于上文讨论,本研究构建了一个简单且高效的自学框架(self-learning framework),可完成实例识别(realizing instance recognition),厘清人们所穿所持物体(humans wearing or carrying items)的归属关系(attribution relationships),具体指:1) 定位人们所持物体(human carrying items),完成实例识别(realizing instance recognition); 2) 完成用户识别(user identification); 3) 选择合适的归属关系学习算法(appropriate ownership relationship learning algorithm),从而在用户(service objects)及其所持物体(their carrying items)间建立归属关系(ownership relationship)。

本研究首先将人类姿态估计模型(human pose estimation model)与全局物体检测模型(global object detection model)相结合,用以定位人们所持物体(localization of humans carrying items),而后借助迁移卷积神经网络(transferred convolutional neural network)提取物体特征(characteristics of the objects),并用距离度量分类器(distance-metric classifier)识别物体实例(recognize the object instance),同时,采用面部检测及识别模型(face detection and recognition model)识别用户个人(service individual),在此基础之上,本文最后提出自主学习策略(autonomous learning strategy),旨在完成人与所持物体间归属关系的自学任务(self-learning)。
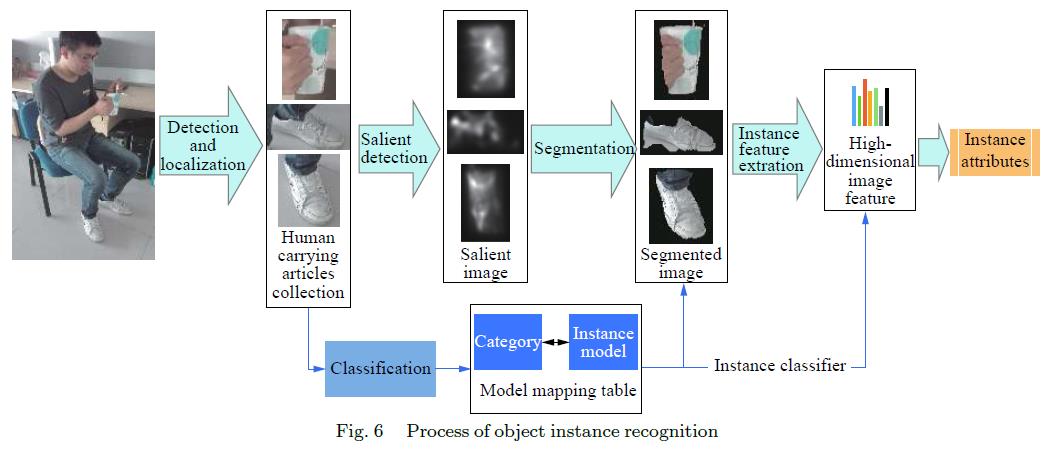
本文第二部分总体讨论了归属关系语义学习策略(overall ownership relationship semantic learning strategy),包括所持物体定位(localization of human carrying items)、实例识别方法(instance recognition method)、用户识别方法(user identification method)、归属关系学习策略(learning strategy of the ownership relationship)。

Item Ownership Relationship Semantic Learning Strategy for Personalized Service Robot
个性化服务机器人的物品归属关系语义学习策略
摘要:
In order to satisfy the robotic personalized service requirements that can select exclusive items to perform inference and planning according to different service individuals, the service robots need to have the ability to independently obtain the ownership relationship between humans and their carrying items. In this work, we present a novel semantic learning strategy for item ownership. Firstly, a human-carrying-items detection network based on human posture estimation and object detection model is used. Then, the transferred convolutional neural network is used to extract the characteristics of the objects and the back-end classifier to recognize the object instance. At the same time, the face detection and recognition model are used to identify the service individual. Finally, on the basis of the former two, the active learning of ownership items is completed. The experimental results show that the proposed ownership semantic learning strategy can determine the ownership relationship of private goods accurately and efficiently. The solution of this problem can improve the intelligence level of robot life service.
关键词:
Service robot, ownership relationship, convolutional neural network, human-object spatial relationship, personalized service.
全文下载:

A Selective Attention Guided Initiative Semantic Cognition Algorithm for Service Robot
Huan-Zhao Chen, Guo-Hui Tian, Guo-Liang Liu
Learning to Transform Service Instructions into Actions with Reinforcement Learning and Knowledge Base
Meng-Yang Zhang, Guo-Hui Tian, Ci-Ci Li, Jing Gong


https://blog.sciencenet.cn/blog-749317-1222921.html
上一篇:【专题好文】基于神经网络的新型乳腺癌检测框架
下一篇:推荐一款强大的公式编辑器