博文
基于算术均值一致性的高效、分布式、联合传感定位与多目标跟踪
|||
A Computationally Efficient Approach for Distributed Sensor Localization and Multitarget Tracking
Publisher: IEEE
Abstract:
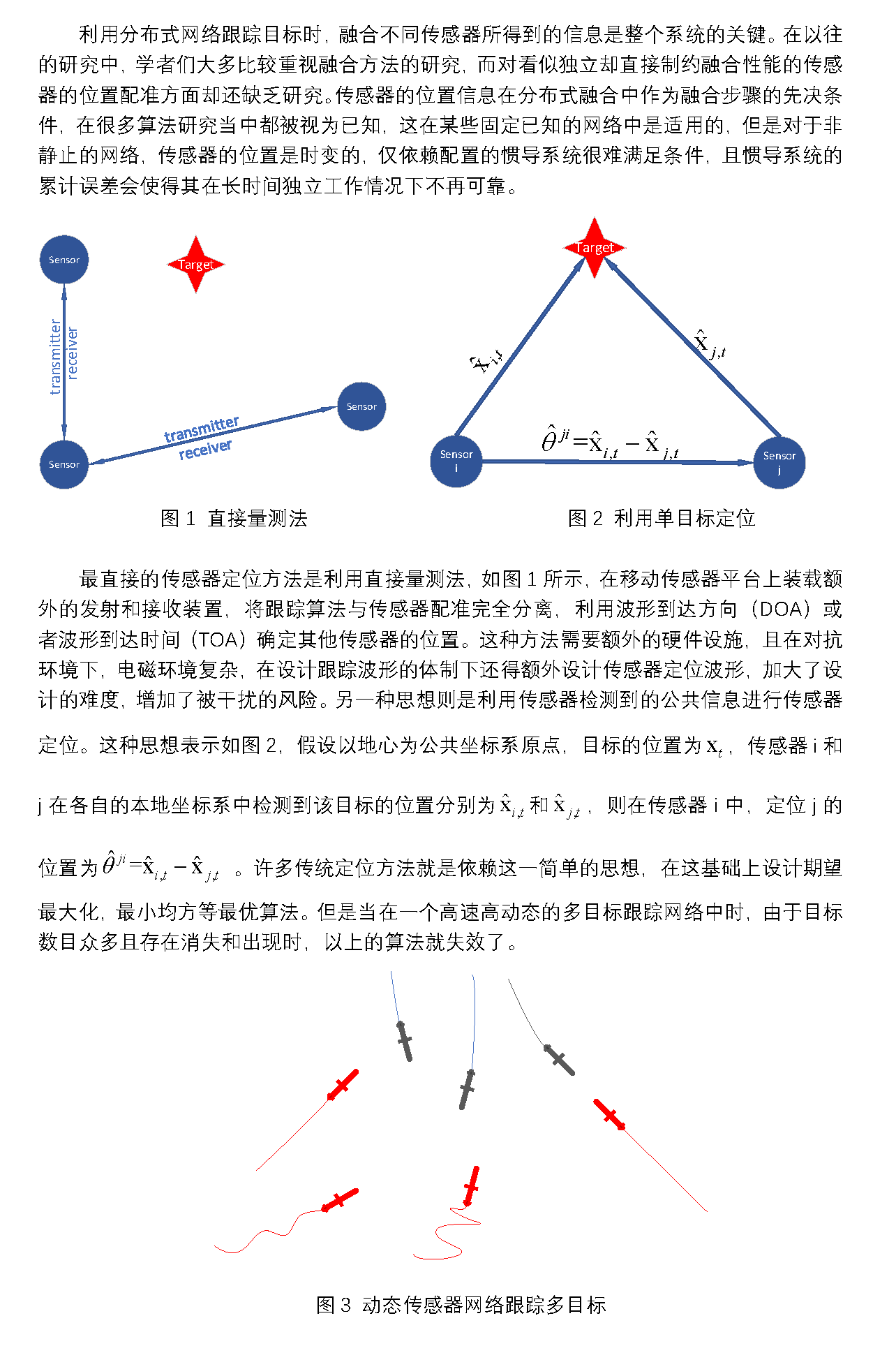
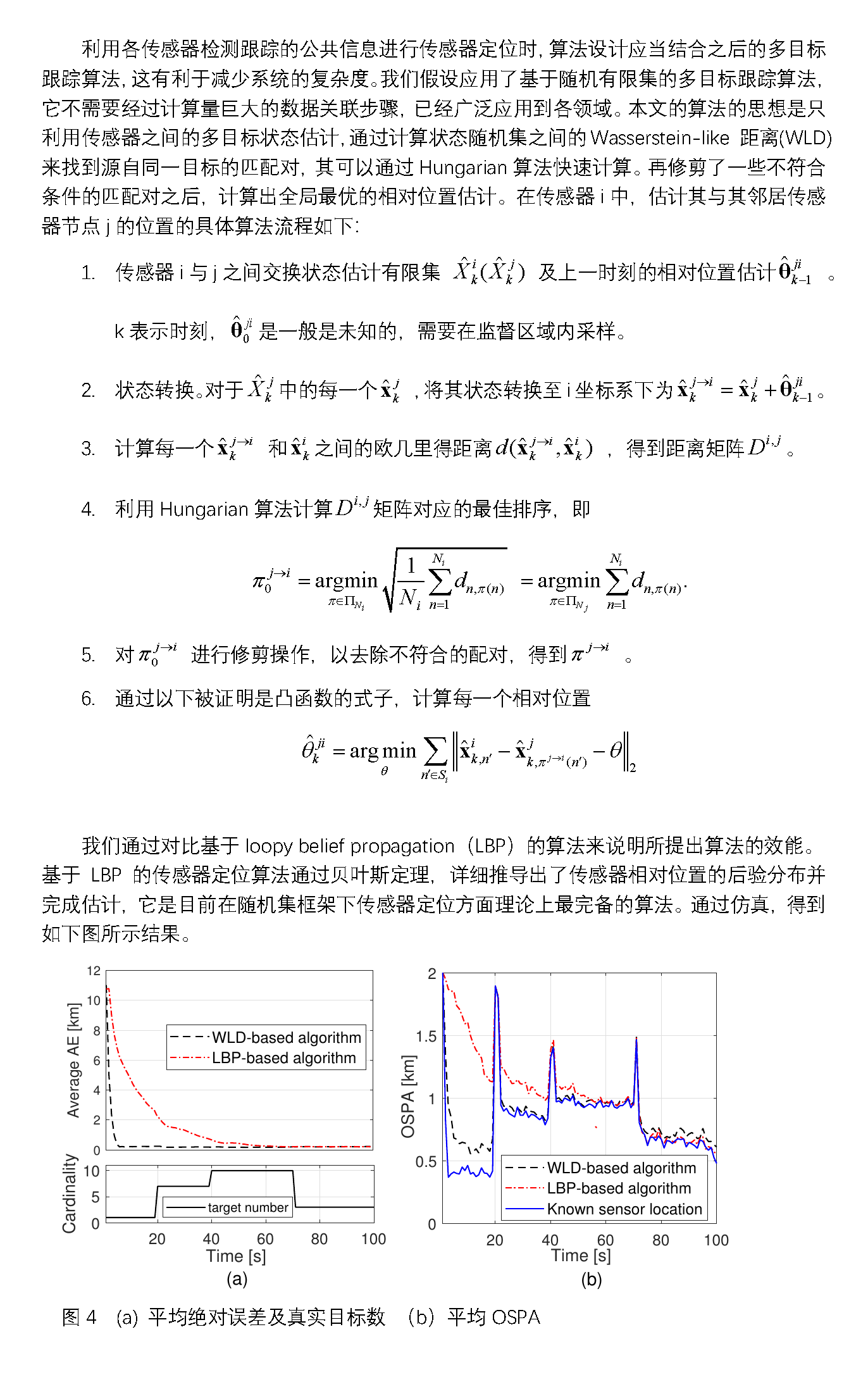
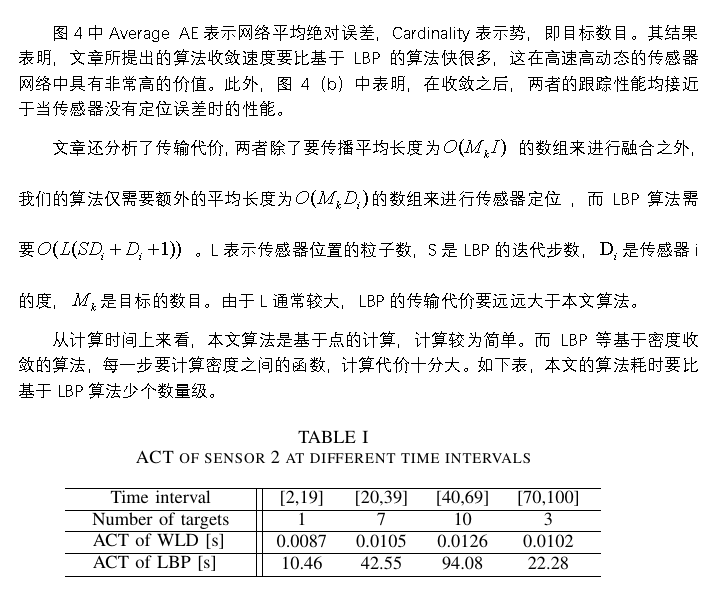
In the context of distributed target tracking based on a mobile peer-to-peer sensor network, the relative locations between the sensors are critical for their internode information exchange and fusion. For accurate coordinate calibration between the neighboring sensors, namely sensor localization, we propose a computationally efficient approach that minimizes the mismatch error between position estimates of the common targets yielded at neighbor sensors. This mismatch error is given by a Wasserstein-like distance that is a mean square error between two sets of position estimates which are associated efficiently via Hungarian assignment. Simulations have demonstrated that our approach, on the testbed of an arithmetic average fusion based probability hypothesis density filter, performs similar to the cutting-edge approach based on loopy belief propagation, but computes much faster and has much lower communication cost.
Published in: IEEE Communications Letters ( Early Access )
Page(s): 1 - 1
Date of Publication: 21 November 2019
为实现基于分布式传感器网络的目标跟踪,传感器之间的相对位置是节点间信息交换和融合的关键。为了精确标定相邻传感器之间的坐标,本文提出了一种计算效率很高的传感器自定位方法,该方法通过最小化相邻传感器产生目标位置点估计之间的失配误差而实现。这种失配误差类似于Wasserstein距离,其通过匈牙利算法关联的两组位置估计值之间的均方误差而得到。该方法物理概念清晰,计算简便而有稳定,通信需求低。仿真结果表明,在基于算术平均融合的PHD滤波器的实验平台上,该方法的性能与现有基于后验分布匹配的方法相似,但计算速度快,通信成本低。
此文是在笔者在算术均值一致性信息融合方向上系列文章更进一步,首次考虑动态传感网中传感器位置不确定性问题。所采用的滤波器仍然是最基础的PHD滤波器,因此本文方法可以扩展到后需要的其他滤波器。 前面系列论文请见:
https://blog.sciencenet.cn/blog-388372-1207480.html
上一篇:基于算术均值一致性的分布式伯努利滤波目标联合探测与跟踪
下一篇:定位、跟踪、监控、导航与智慧感知 专刊 Call for Papers
全部作者的精选博文
全部作者的其他最新博文
全部精选博文导读
相关博文
- • Does Consciousness Depend on Hallucination?(初学者版)
- • Relativity of Consciousness (初学者版)
- • Artificial Consciousness in Legal Applications (初学者版)
- • 2024-6-22回顾:Integrating the DIKWP Model into Hardware(初学者版)
- • Child-Safe Device Using the DIKWP Model(初学者版)
- • Purpose Driven 3-No problem-solving of DIKWP-TRIZ(初学者版)