博文
基于广义PI观测器零点配置的抗扰残差评估和故障检测
|
引用本文
胡宇翔, 代学武, 崔东亮, 周冬. 基于广义PI观测器零点配置的抗扰残差评估和故障检测. 自动化学报, 2023, 49(6): 1228−1241 doi: 10.16383/j.aas.c211235
Hu Yu-Xiang, Dai Xue-Wu, Cui Dong-Liang, Zhou Dong. A generalized proportional-integral observer with zero assignment for disturbance rejection residual evaluation and fault detection. Acta Automatica Sinica, 2023, 49(6): 1228−1241 doi: 10.16383/j.aas.c211235
http://www.aas.net.cn/cn/article/doi/10.16383/j.aas.c211235
关键词
故障检测,广义比例积分观测器,零点配置,条件数
摘要
针对一类存在周期性扰动的系统, 提出一种新型的基于广义比例积分(Proportional-integral, PI)观测器零点配置的抗扰残差评估框架. 充分利用广义PI观测器的零点可配置性, 通过调整传递函数矩阵在阻塞零点处的相位响应, 并利用该频点处矩阵的零特征向量对残差信号进行滤波, 实现残差信号与周期性扰动的解耦. 此外, 还创新性地提出一种基于矩阵条件数的优化目标函数, 改善了残差信号对故障的敏感性. 最后, 通过两轮自平衡小车的仿真对比实验和实物测试, 验证了所提方法在残差抑扰和故障检测方面的有效性.
文章导读
随着工业4.0[1]和“熄灯”工厂的提出, 在少人甚至无人的智能生产制造中, 及时准确地检测机械手、移动机器人等机械运动设备故障, 减少非计划停机, 具有重要意义[2].
较多情况下, 运动控制系统中存在一类呈现周期性特征的扰动信号, 如周期性负载变化、旋转机械、周期性振动/加速度、工频和谐波干扰以及设备运行过程中受到风、浪、流影响等. 这些扰动具有明显的频率特征, 其能量并不是均匀分布在所有频域, 而是集中于某些特定的频率点. 受这类扰动的影响, 故障信号很可能被淹没于待检测信号的周期性波动之中. 因此, 如何减少周期性扰动对故障检测信号的影响, 同时提高待检测信号对故障的敏感性, 是故障检测领域中一个值得研究的问题[3].
现有的故障检测的方法可分为基于信号处理的故障检测方法[4]、基于模型的故障检测方法[5]和基于知识和数据驱动的故障检测方法[6]三类. 在基于模型的故障检测方法中, 基于观测器的在线故障检测方法因其简便、易实施性而被广泛应用. 该方法的核心是设计一个合适的观测器, 通过判断残差信号的幅值(系统实际输出的测量值和观测器输出的估计值之差)是否超出一定的安全阈值, 来判断系统是否发生故障. 基于观测器的故障检测方法被广泛研究, 提出了许多经典的故障检测观测器, 例如龙伯格观测器[7-9]、卡尔曼滤波器及其扩展[10-11]、滑模观测器[12-13]、未知输入观测器[14-15]等. 近些年来, 为了进一步提高故障检测观测器对扰动的鲁棒性和对故障的敏感性, 基于鲁棒优化思想设计观测器的方法也被深入研究, 例如Pertew等[16]设计了$ H_{\infty} $观测器, 借助黎卡提不等式求算反馈增益矩阵. Gao等[17]构造了$ H_2/H_{\infty} $观测器, 通过求解线性矩阵不等式寻找最优增益矩阵. Liang等[18]基于$ H_{-}/H_{\infty} $优化思想, 设计了一种未知输入观测器, 采用$ H_- $范数描述了残差信号对执行器故障的敏感度. 现有的鲁棒设计方法大都采用$ H_{\infty} $范数或$ H_2 $范数描述扰动信号与残差信号间的能量关系, 但是基于这些描述方法优化得到的观测器, 仅能保证在整个频域或某些频域段内最坏情况下残差信号对扰动信号的鲁棒性, 保守性较强.
从观测器的结构来看, 大多数鲁棒故障检测观测器是基于传统的龙伯格观测器[19] (一种比例观测器)设计的, 其本质是通过调节观测器闭环系统的极点来改善残差信号的品质. 相比传统的比例观测器, 比例积分(Proportional-integral, PI)观测器在反馈回路中引入了残差信号的积分量, 增加了参数设计的自由度[20]. 但是由于上述两种观测器的零点不可配置的特点, 现有的相关工作大多只考虑了系统的极点, 而忽略了系统中零点对残差信号品质的影响. Dai等[21]提出的动态观测器(又称为广义PI观测器) 克服了比例观测器中零点不变的缺点, 通过在反馈回路中增加动态特性, 实现了系统的零点和极点的同时优化, 进一步改善了基于动态观测器的故障检测性能. 文献[21]验证了, 通过动态配置系统零点至扰动频率附近, 可以有效衰减周期性扰动到残差信号的输出响应. 但是, 仅依靠动态观测器无法实现残差信号与周期性扰动的完全解耦, 这是启发本文研究的一个点.
以故障检测为目的的观测器本质上等同于一种信号滤波器, 通过抑制周期性扰动到残差信号的输出响应, 并提高故障信号到残差信号的输出响应, 实现更精确的故障检测. 通常情况下, 仅通过优化广义PI观测器的参数矩阵无法彻底滤除残差信号中的周期性扰动成分. 因此, 针对一类存在周期性扰动的系统, 本文提出了一种新的基于广义PI观测器零点配置的抗扰残差评估和故障检测方法. 这个框架能充分利用广义PI观测器的零点可配置性和传递函数矩阵在干扰阻塞零点降秩的特点, 通过构造实系数向量对残差信号进行滤波, 从而实现最终输出的残差信号与周期性扰动的解耦. 本文以两轮小车运动控制系统为例, 通过仿真实验和实物测试, 验证了所提方法的有效性. 实验结果表明, 本文方法相较于基于单一广义PI观测器[21-22]的故障检测方法, 性能上有了明显提升. 本文主要贡献如下:
1)提出一种新的基于广义PI观测器的抗扰残差评估和故障检测框架, 并给出了广义PI观测器稳定的充分条件. 该框架可有效滤除残差信号中周期性扰动成分, 提高对微小故障的检测能力.
2)提出一种设计广义PI观测器的新方法. 通过动态配置广义PI观测器的阻塞零点, 构造在扰动频点处降秩的扰动传递函数矩阵. 通过调整扰动传递函数矩阵在扰动频点的相位响应, 并利用该频点处传递函数矩阵的降秩性, 给出了抗扰残差评估环节中实系数向量的存在性证明和设计方法.
3)提出一种新的基于传递函数矩阵条件数的故障敏感度优化目标函数, 扩大了扰动和故障传递函数矩阵之间差异度的同时, 改善了残差信号对故障信号的敏感性.
本文内容安排如下: 第1节给出待检测系统的状态空间模型, 构建基于广义PI观测器零点配置的抗扰残差评估和故障检测方法, 同时给出广义PI观测器稳定的充分条件; 第2节给出广义PI观测器和实系数增益向量的设计定理以及相关证明; 第3节提出一种基于条件数的故障敏感度优化目标函数; 第4节通过仿真对比实验和实物测试, 验证该方法在扰动抑制和故障检测方面的有效性; 第5节对提出方法进行总结.
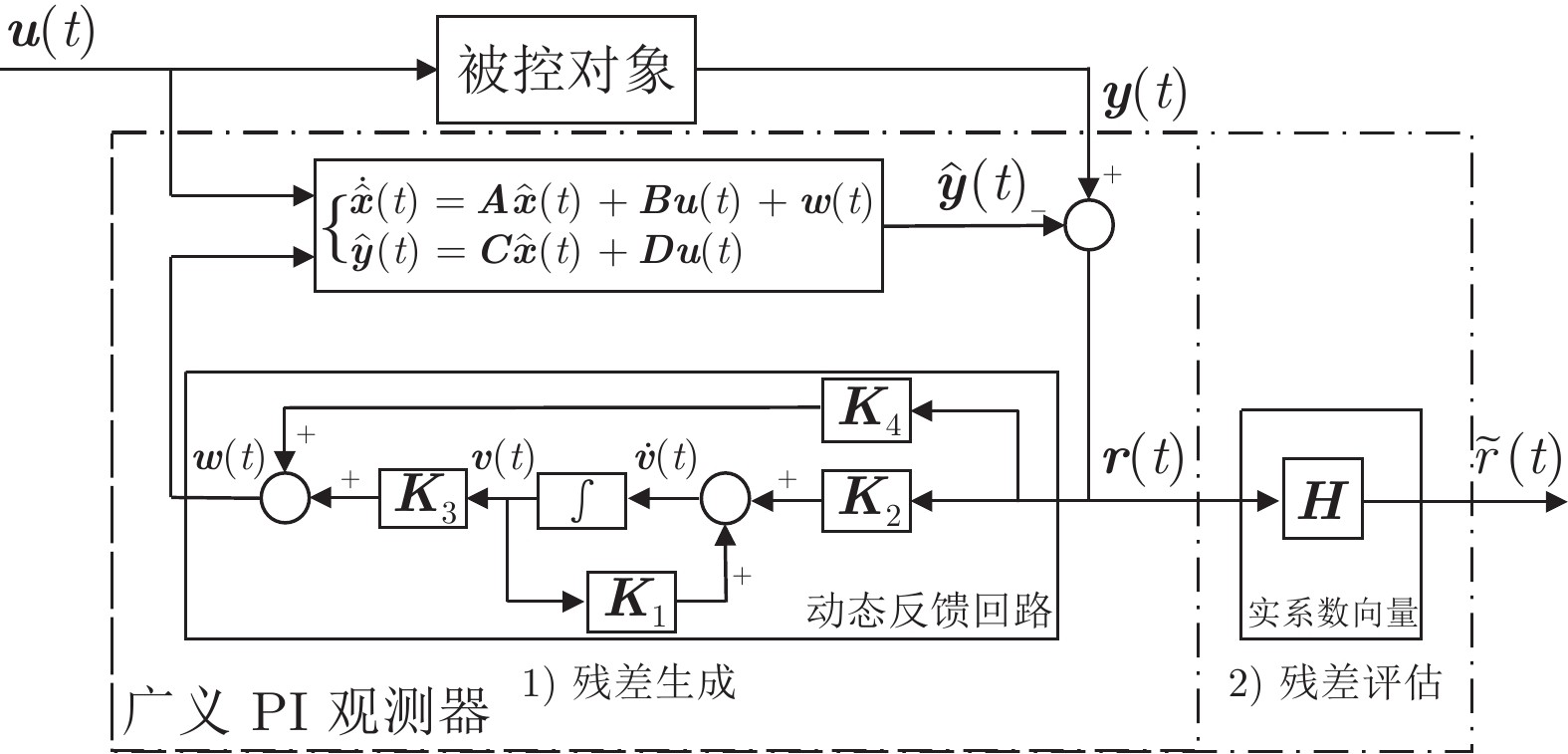
图 1 基于广义PI观测器和残差评估的故障检测系统框图
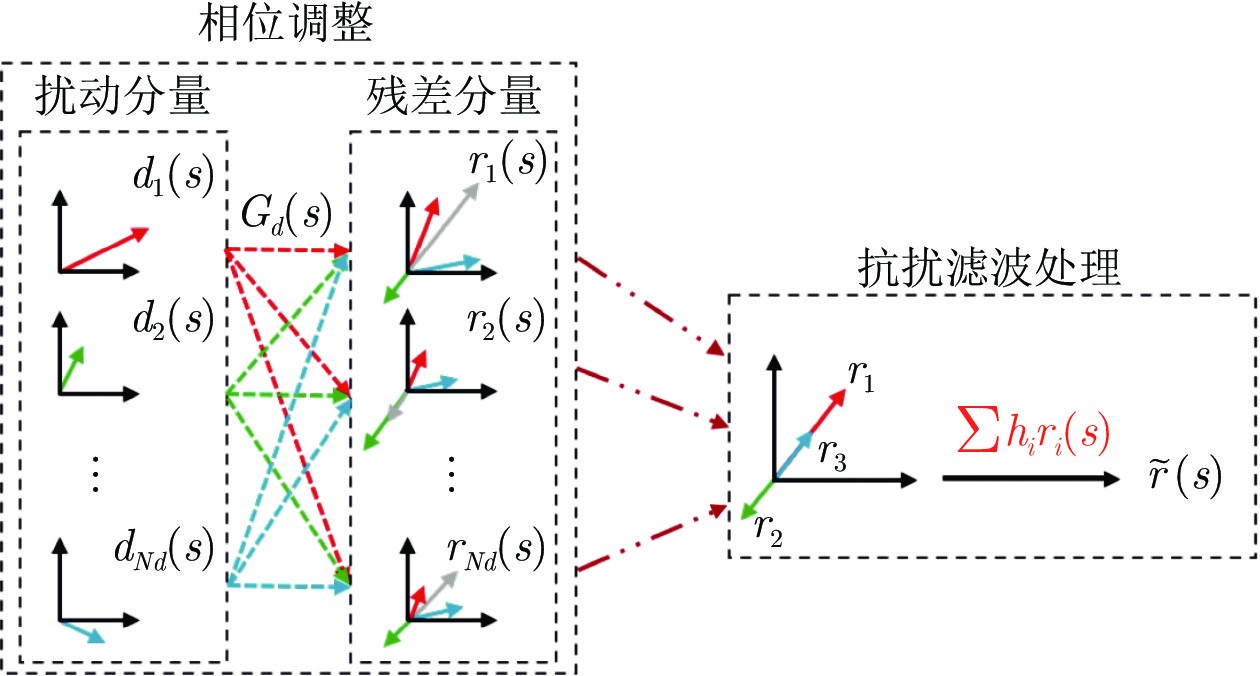
图 2 传递函数矩阵相位调整和抗扰滤波原理示意图
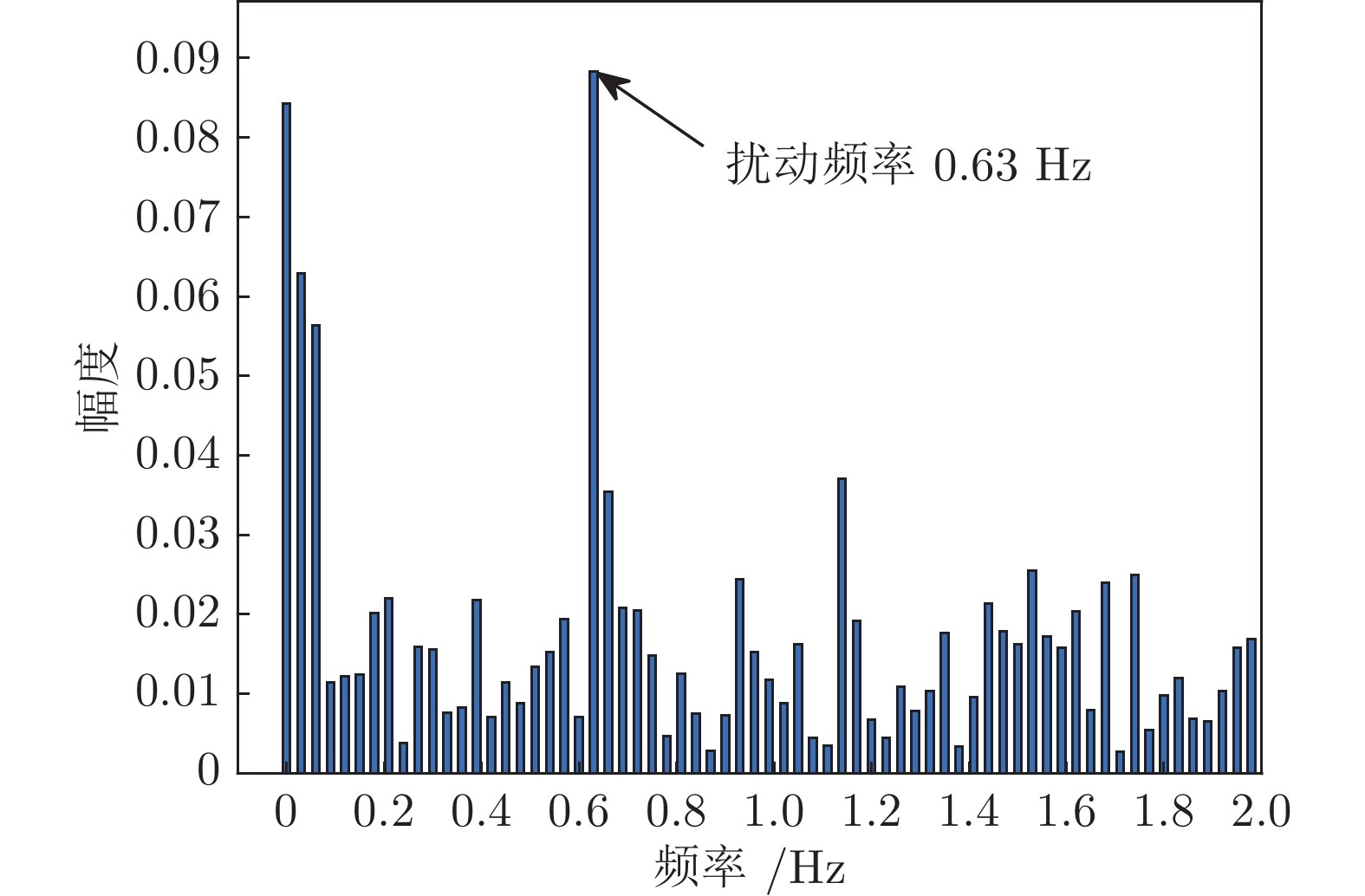
图 3 比例观测器的输出残差信号的1024-FFT频谱
本文针对存在周期性扰动的控制系统中的故障检测问题, 提出了一种基于广义PI观测器零点配置和抗扰残差评估的故障检测方法. 首先, 通过动态配置广义PI观测器的部分零点至扰动频率附近, 构造在扰动频点处降秩的扰动传递函数矩阵; 其次, 通过增设相位约束, 调整扰动传递函数矩阵在扰动频点处的相位响应; 最后, 利用扰动频点处传递函数矩阵的降秩性和相位特征, 构造实系数增益向量调整残差信号的幅度响应. 通过仿真实验和实物测试, 验证了本文方法在检测微小故障方面的有效性和优越性. 需要说明的是, 本文方法仍适用于对执行器故障的检测.
下一步工作将考虑基于本文的设计思路, 改进广义PI观测器的结构和设计方法, 最终目标是不依靠残差评估环节, 仅通过观测器自身, 便可消除残差信号中的周期性扰动成分.
作者简介
胡宇翔
东北大学流程工业综合自动化国家重点实验室博士研究生. 2020年获得沈阳建筑大学学士学位. 主要研究方向为鲁棒故障检测, 容错控制. E-mail: HuYx0126@163.com
代学武
东北大学流程工业综合自动化国家重点实验室教授. 主要研究方向为鲁棒状态估计和状态监测, 多智能体系统的同步, 网络化控制与智能调度协同优化及其在工业物联网高精度时间同步和轨道交通调度控制一体化. 本文通信作者. E-mail: daixuewu@mail.neu.edu.cn
崔东亮
东北大学流程工业综合自动化国家重点实验室讲师. 分别于1999年和2001年获得华中科技大学学士学位和硕士学位、2013年获得东北大学博士学位. 主要研究方向为工业物联网与人工智能. E-mail: cuidongliang@mail.neu.edu.cn
周冬
齐重数控装备股份有限公司工程师. 主要研究方向为数控机床, 检测技术. E-mail: 13763512779@163.com
https://blog.sciencenet.cn/blog-3291369-1393892.html
上一篇:高速列车牵引电机转子断条和速度传感器联合诊断方法
下一篇:基于改进扩展状态观测器的液压锚杆钻机滑模摆角控制