博文
SEAs导纳控制的μ综合方法
|
引用本文
李思奇, 黄远灿. SEAs导纳控制的μ综合方法. 自动化学报, 2021, 47(7): 1539−1547 doi: 10.16383/j.aas.c180576
Li Si-Qi, Huang Yuan-Can. μ-Synthesis for admittance control of SEAs. Acta Automatica Sinica, 2021, 47(7): 1539−1547 doi: 10.16383/j.aas.c180576
http://www.aas.net.cn/cn/article/doi/10.16383/j.aas.c180576
关键词
串联弹性驱动器,μ综合,导纳控制,混合稳定性
摘要
SEAs (Series elastic actuators)具有在确保机器人性能的基础上兼顾其安全性的特点, 因此被广泛地应用在康复机器人中. 为实现良好的康复训练效果, 机器人需根据实际要求呈现不同的阻抗特性. 本文采用μ综合技术解决了SEAs导纳控制器的设计问题. 首先, 考虑参数摄动、传感器噪声、输入干扰及控制输入限制等不确定性因素, 建立SEAs模型. 其次, 应用混合稳定性原理分析系统的交互稳定性. 由于无源环境的阻抗在高频段必然呈现小增益特性, 所以, 当端口导纳在低频段满足无源性, 高频段具有小增益时, 就能确保交互的稳定性. 然后, 将SEAs的导纳控制综合问题转化为实际端口导纳与期望导纳匹配的μ综合问题. 最后, 通过调节加权函数, 不仅让SEAs闭环系统的端口导纳逼近期望的端口导纳, 还能同时满足交互稳定性条件, 从而可以独立于环境因素来设计导纳控制器. 仿真结果表明, 基于μ综合方法设计的控制器, 能精确地逼近期望的端口导纳, 且确保交互稳定性. 另外, 通过Hankel逼近方法得到的降阶控制器也具有满意的控制效果.
文章导读
串联弹性驱动器[1] (Series elastic actuators, SEAs)是一种将弹性组件串联于电机和负载之间的柔性驱动器, 它具有吸收冲击, 降低输出阻抗和高精度力矩输出等优点[2-5]. 因此被广泛应用于机器人中, 以提高人机接触的安全性和舒适性, 如美国Rethink Robotics公司的Baxter机器人[6], 荷兰Twente大学的下肢动力外骨骼LOPES[7]等各种康复/助力机器人.
为实现良好的交互行为, Hogan[8]提出阻抗控制方法. 随后Colgate等[9-10]将无源性理论用于阻抗控制的交互稳定性. Pratt等利用前馈补偿结合PID力控方法, 提高交互性能[1]. 串级结构被广泛地应用于SEAs控制, 其中以力矩外环嵌速度或位置内环最流行[11-13], 该结构可以实现低阻抗, 但由于无源性约束, 视在刚度不能超过SEAs的物理刚度. 文献[14]设计了基于双曲正弦函数的鲁棒模糊滑模控制方法, 解决柔性关节的力矩受限问题. 文献[15]提出前馈补偿和模糊滑模相结合的鲁棒控制器, 实现良好的位置跟踪性能和抗干扰能力. 文献[16]设计基于RISE反馈的最优控制方法, 克服SEAs的模型参数不确定和有界扰动, 实现快速平稳的力矩跟踪.
H∞控制能有效地处理非结构不确定性问题[17], 而μ综合方法通过不确定性结构降低了保守性[18]. 文献[19]针对两自由度柔性关节机器人运用μ综合方法, 设计鲁棒位置运动控制器. 文献[20]采用μ综合方法抑制柔性关节臂的振动问题. 文献[21]在考虑参数变化和外界干扰的基础上, 通过μ综合方法设计刚性并联机器人的柔顺力控制, 模拟空间对接过程.
在康复机器人应用中, 根据不同的康复训练模式, 要求机器人能呈现大范围的阻抗变化. 因此, 寻找一种能任意逼近期望端口阻抗的设计方法, 成为康复机器人实用化的关键. 本文依据阻抗匹配的思想, 利用μ综合方法设计SEAs的导纳控制器, 实现端口导纳的大范围变化.
文章的结构如下: 第1节建立SEAs的双质量块模型, 并考虑参数摄动; 第2节提出了混合交互稳定性的概念; 第3节基于μ综合方法设计了SEAs的导纳控制器, 在满足匹配精度的同时保持交互稳定性; 第4节仿真实现5种导纳模式, 验证μ综合方法设计导纳控制器的有效性; 最后总结全文.

图 1 SEAs模型
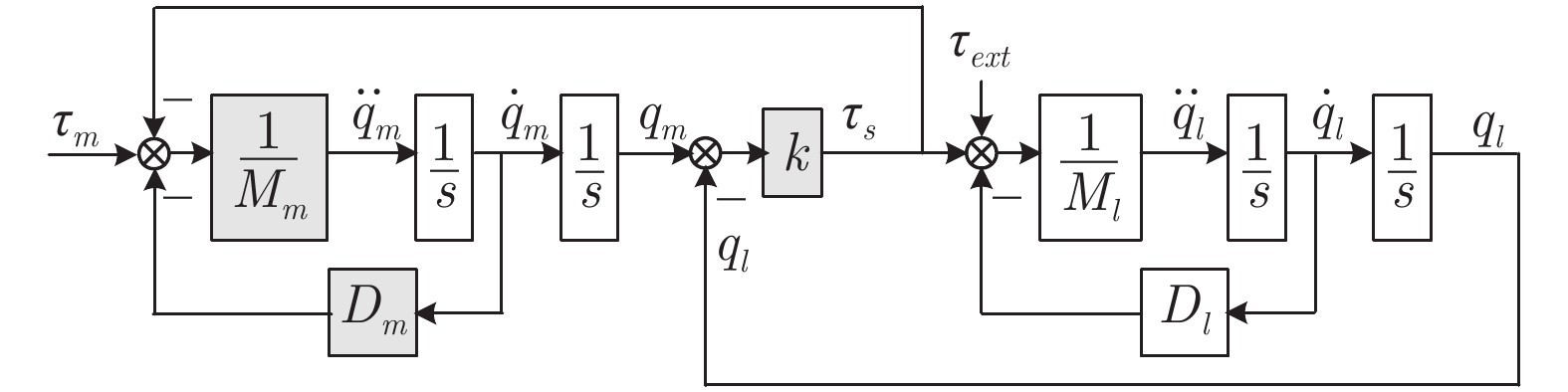
图 2 SEAs结构框图

图 3 混合交互稳定性实例
本文使用μ综合解决了含有不确定性SEAs的导纳控制问题. 不确定性包括模型参数摄动, 传感器噪声, 输入干扰和控制输入限制等. 通过选择z1加权函数使受控系统的端口导纳逼近期望导纳, 呈现低频段无源, 高频段小增益的特点, 解决了系统与环境的交互稳定性问题, 实现独立于环境的导纳控制器设计. 以零阻抗和4种导纳模型的端口导纳特性为例, 设计满足混合稳定性条件的导纳控制器, 并对控制器进行了降阶. 仿真结果表明, 该方法能有效地设计SEAs鲁棒导纳控制器.
作者简介
李思奇
北京理工大学机电学院博士研究生. 2011年获得太原科技大学机械工程硕士学位. 主要研究方向为电路设计, 鲁棒控制, 人 − 机交互控制. E-mail: rxjrlsq@163.com
黄远灿
北京理工大学机电学院副教授,博士. 主要研究方向为柔性机器人, 阻抗控制和非线性系统控制. 本文通信作者. E-mail: yuancanhuang@bit.edu.cn
https://blog.sciencenet.cn/blog-3291369-1351290.html
上一篇:串联弹性驱动器设计、建模及在机器人上的应用
下一篇:基于强化学习的浓密机底流浓度在线控制算法