博文
基于中心对称多胞体的故障可分离性评价
|
引用本文
王桢榕, 王振华, 沈毅. 基于中心对称多胞体的故障可分离性评价. 自动化学报, 2022, 48(8): 1921−1930 doi: 10.16383/j.aas.c190770
Wang Zhen-Rong, Wang Zhen-Hua, Shen Yi. Fault isolability evaluation based on zonotope. Acta Automatica Sinica, 2022, 48(8): 1921−1930 doi: 10.16383/j.aas.c190770
http://www.aas.net.cn/cn/article/doi/10.16383/j.aas.c190770
关键词
动态系统,中心对称多胞体,故障可分离性,方向相似度
摘要
针对包含幅值有界而分布形式未知的故障及输入干扰项的线性离散系统, 提出了一种新的系统故障可分离性的量化评价方法. 故障可分离性是故障可诊断性中的重要部分, 针对现有方法中基于方向相似度的故障可分离性评价方法存在的不足加以补充, 提出了利用中心对称多胞体对故障可分离性进行分析, 将中心对称多胞体集合转化为多面体的表示形式, 以达到对故障可分离性量化评价的目的, 同时给出了具体评价原理和评价指标. 最后, 通过数值仿真算例, 验证了该方法的有效性和优越性.
文章导读
近年来, 现代控制系统变得越来越复杂, 一旦控制系统发生故障, 就可能导致灾难性事故[1-4]. 例如, 2019年3月10日, 埃塞俄比亚航空一架波音737-8飞机起飞不久后坠毁, 经过初步调查表明导致事故发生的元凶很可能在于飞机的机动特性增强系统, 而同时飞机又缺乏相应的故障诊断, 进而导致了惨剧的发生[5]. 传统提高控制系统安全性的方法是提高系统各个部件的可靠性, 但在实际环境中并不能保证系统的无故障运行, 所以故障诊断技术现在已经成为自动控制领域中一个十分重要的分支[6-7].
故障可诊断性一般用于衡量故障能够被准确和有效识别的程度, 文献[8]中将系统故障可诊断性分为固有和实际可诊断性两种. 固有可诊断性是系统的固有属性, 实际可诊断性就是在固有可诊断性的基础上考虑系统运行的实际因素, 根据关注问题的不同, 各个系统考虑的影响因素也不尽相同[9-13]. 故障可诊断性包括故障可检测性和故障可分离性, 其中故障可分离性包括了可分离性评价和设计两方面[14]. 一个系统的故障可分离性是客观存在的, 它与系统的测量信息密切相关, 但系统中可能存在某些故障以及干扰影响, 使得系统的测量信息表征几乎相同, 这就需要先对故障可分离性进行评价. 若系统故障不可分离, 则故障诊断思路就会失效, 故对系统故障可分离性的评价是实现故障诊断算法设计的前提[15].
故障可分离性评价方法从广义上来讲可分为两大类: 不依赖于控制系统解析模型的方法和基于系统解析模型的方法[16]. 不依赖于解析模型方法的研究的核心是要获取大量真实反映系统特征的样本数据[17], 如文献[18-19]设计了基于数据的故障可分离性量化评价指标. 文献[18]结合了平方预测误差和T2对多维故障可检测性条件进行分析, 完成了故障可分离性研究; 文献[19]利用两个不同故障状态之间的模糊集相似度大小完成量化评价, 模糊集差别越大, 则两者越容易被隔离.
然而从控制系统设计的角度出发, 人们更希望通过系统的解析模型实现故障可分离性的量化评估. 基于解析模型的故障可分离性量化评价方法通过完善的系统建模技术重构了系统的动态行为[20-23], 近年来有了一些初步研究成果. 文献[24]运用了以测量概率分布差异度为基础的Kullback-Leibler (K-L)散度, 结合了假设检验方法, 提出了一种数据量化分类的方法. 以此为理论依据, 文献[25]对一般线性系统利用K-L散度进行了故障可分离性量化评估. 由于残差概率密度函数是基于K-L散度的故障可诊断性定量评价的计算基础, 文献[26]在结合K-L散度的基础上引入了稀疏内核密度估计方法, 使得残差概率密度函数的估算更精确、更光滑. 然而上述方法均需设计残差从而实现可分离性评价, 残差的设计过程直接影响了评价结果, 即评价结果严重依赖于诊断算法的精度, 同时基于K-L散度的可分离性评价方法在实际应用中对于一类本身可被检测的故障模式是失效的[25].
为了解决这个问题, 文献[27]运用时间迭代的方法, 将动态系统映射成静态系统, 引入了方向相似度概念, 从而实现包含已知分布形式干扰的系统故障可分离性量化评价. 然而该方法在具体应用过程中存在以下不足之处: 1)评价过程没有考虑或仅能考虑已知分布形式的干扰, 没有将故障向量考虑在评价指标中; 2)在对系统进行空间映射过程中, 该方法需要引入矩阵零空间的左正交基, 然而选取不同的零空间左正交基会将系统映射到不同的空间, 这会导致在短时间窗口长度条件下量化评价指标结果不统一的情况发生, 由于诊断时间直接影响着控制系统的性能[28], 我们通常希望在故障发生初期即可有效完成故障可分离性评价, 所以该方法的应用会受到时间窗口长度大小的限制.
基于以上讨论, 本文提出了一种基于中心对称多胞体的故障可分离性量化评价方法并开展了相关研究. 与已有故障可分离性量化评价方法相比, 该方法基于系统解析模型, 在无需设计残差的同时弥补了基于方向相似度方法上述两点不足, 实现了可分离性的量化评价. 本文所提方法利用中心对称多胞体获得系统输出不确定性的范围, 然后将中心对称多胞体集合转化为多面体的表述形式, 用计算多面体体积大小的方式达到故障可分离性量化评价的目的. 首先, 本文阐述了基于“方向相似度”可分离性评价方法的基本原理, 并验证说明了该方法在应用中存在的不足; 进而, 提出了一种基于中心对称多胞体的新方法实现对故障可分离性的量化评价, 并给出了具体评价流程和评价指标; 最后, 通过数学仿真算例, 验证了该方法的有效性和优越性.
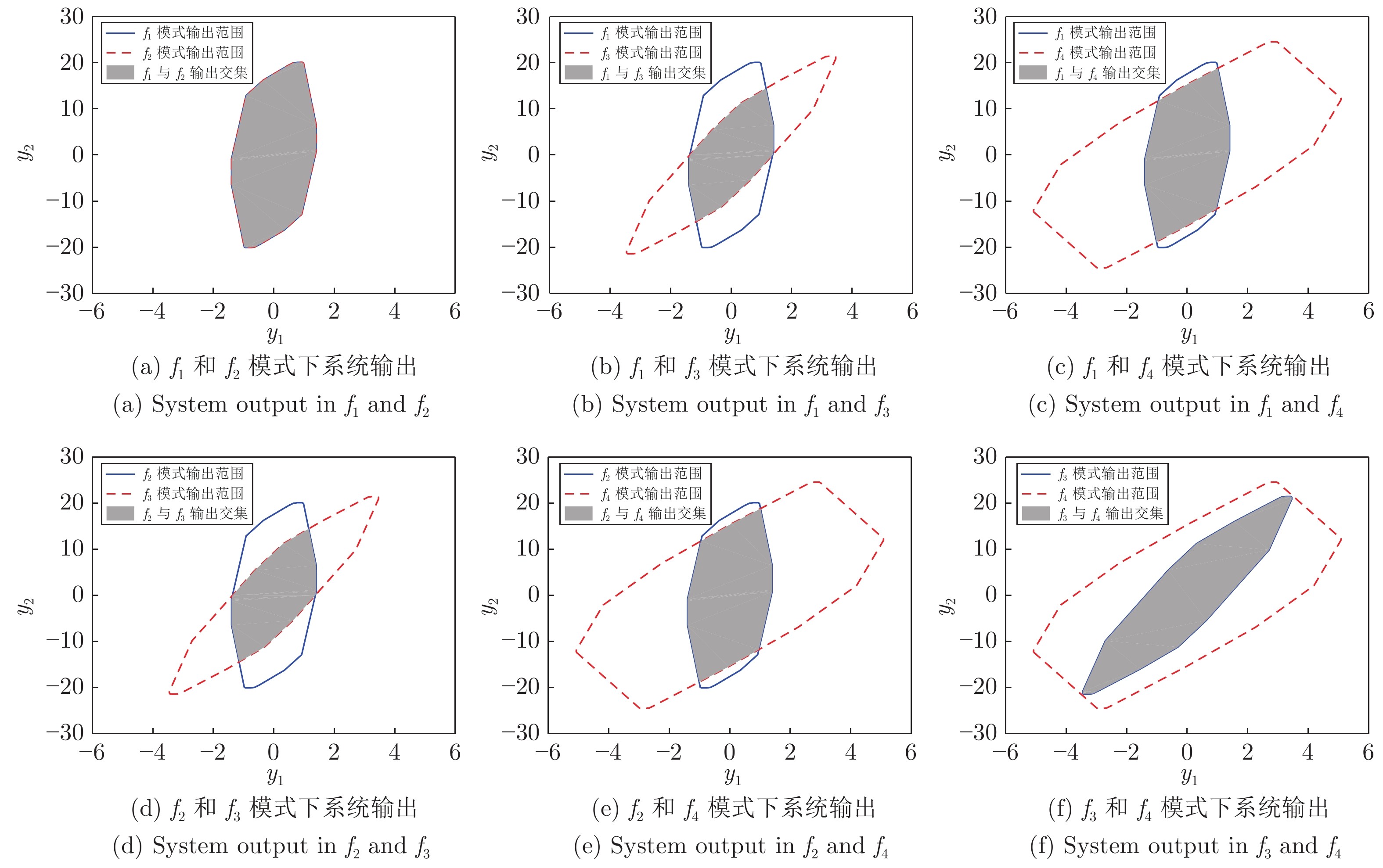
图 1 各个故障模式组合下系统输出结果
本文针对线性离散系统故障可分离性评价开展了相关研究, 提出了一种基于中心对称多胞体的可分离性量化评价新方法. 本文首先以方向相似度为可分离性量化指标, 研究了该方法在实际应用中存在的不足. 为弥补上述不足之处, 本文推导了以中心对称多胞体为评价指标的可分离性评价方法, 并给出了具体指标和评价算法. 最后通过仿真算例的对比, 验证了本文所提评价指标的正确性和有效性, 同时证明了基于中心对称多胞体在实际应用中具备的优越性.
综上, 本文所提出的方法主要优势在于: 针对一类包含未知输入干扰项的线性离散系统, 在仅已知故障及干扰的上下界、未知其具体分布形式的情况下, 在故障发生初期即可有效完成故障可分离性评价, 不会受到时间窗口长度大小的限制.
故障可诊断性的分析与评价方法是一个很有实际意义的研究方向, 但是目前的研究还处于起步阶段, 本文只研究了线性定常系统的故障可分离性评价方法, 如何将本文所提出的方法推广到更具一般性的非线性系统中, 是下一步的研究方向之一.
作者简介
王桢榕
哈尔滨工业大学航天学院硕士研究生. 主要研究方向为基于模型的故障诊断. E-mail: arong_wang@163.com
王振华
哈尔滨工业大学航天学院副教授. 主要研究方向为故障诊断与容错控制技术. E-mail: zhenhua.wang@hit.edu.cn
沈毅
哈尔滨工业大学航天学院教授. 主要研究方向为故障诊断, 飞行器控制, 超声信号处理. 本文通信作者. E-mail: shen@hit.edu.cn
https://blog.sciencenet.cn/blog-3291369-1349743.html
上一篇:基于事件相机的机器人感知与控制综述
下一篇:具有解耦性能的离散时间线性多变量系统最优跟踪控制