博文
基于分布式有限感知网络的多伯努利目标跟踪
|
引用本文
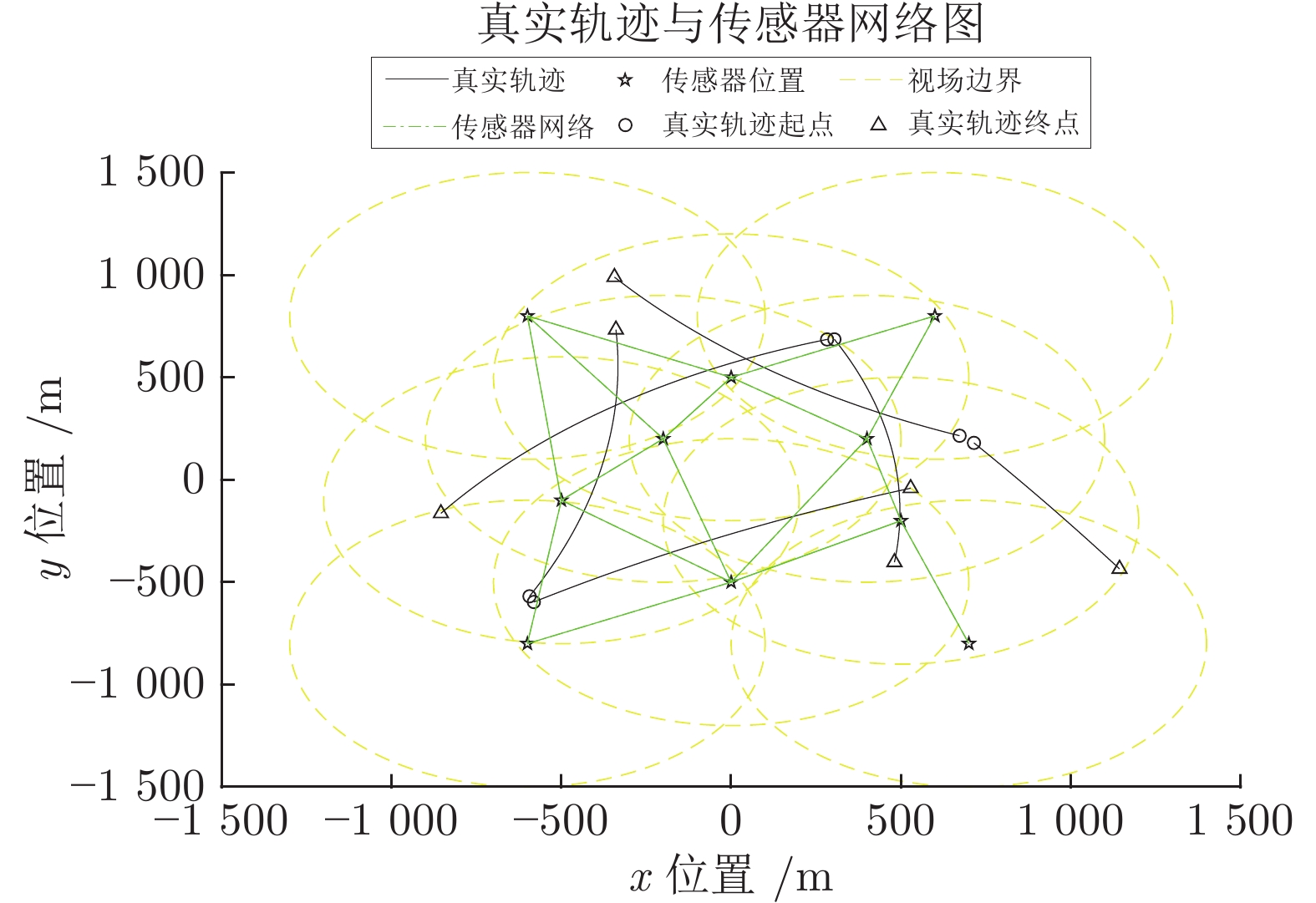
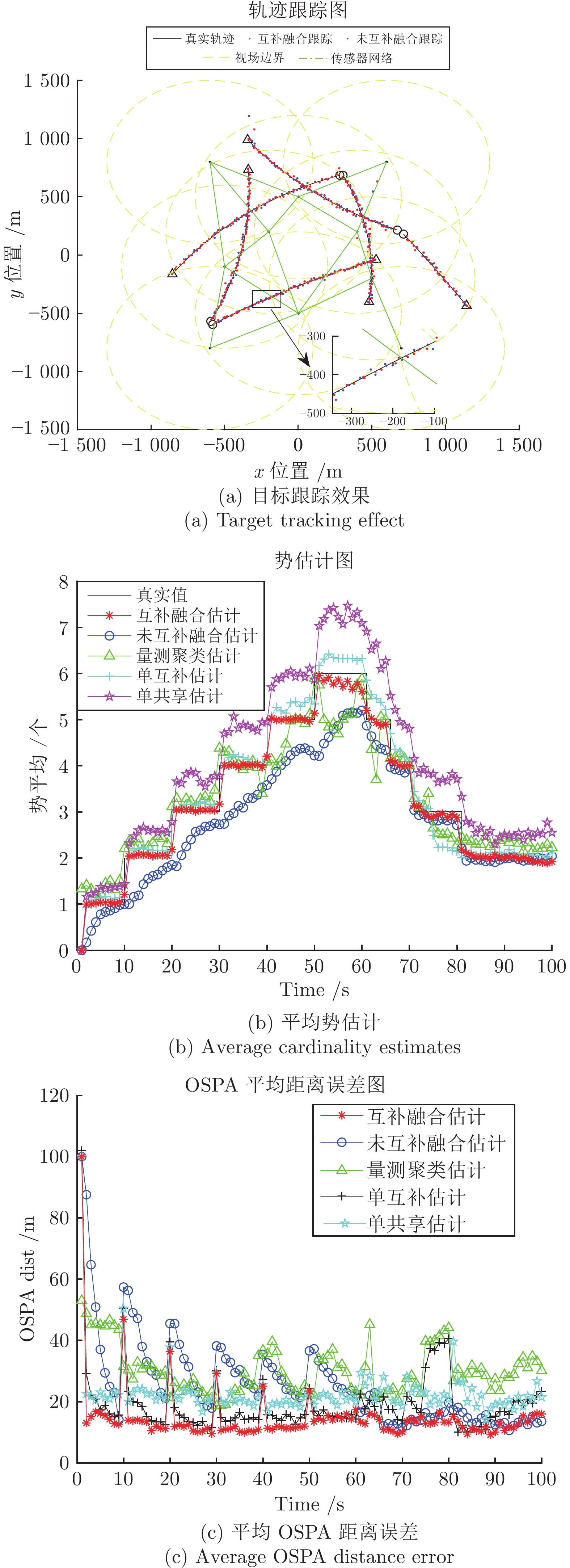
吴孙勇, 王力, 李天成, 孙希延, 蔡如华, 伍雯雯. 基于分布式有限感知网络的多伯努利目标跟踪. 自动化学报, 2022, 48(5): 1370−1384 doi: 10.16383/j.aas.c20048 Wu Sun-Yong, Wang Li, Li Tian-Cheng, Sun Xi-Yan, Cai Ru-Hua, Wu Wen-Wen. Multi-bernoulli target tracking based on distributed limited sensing network. Acta Automatica Sinica, 2022, 48(5): 1370−1384 doi: 10.16383/j.aas.c20048 http://www.aas.net.cn/cn/article/doi/10.16383/j.aas.c200481?viewType=HTML 文章简介 关键词 有限感知范围, 视场互补, 多伯努利关联, 算术平均融合, 多目标跟踪 摘 要 针对感知范围受限的分布式传感网多目标跟踪问题, 在多伯努利滤波跟踪理论基础上提出分布式视场互补多伯努利关联算术平均融合跟踪方法. 首先, 通过视场互补扩大传感器感知范围, 其中, 局部公共区域只互补一次以降低计算成本. 其次, 每个传感器分别运行局部多伯努利滤波器, 并将滤波后验结果与相邻传感器进行泛洪通信使得每个传感器获取多个相邻传感器的后验信息. 随后, 通过距离划分进行多伯努利关联, 将对应于同一目标的伯努利分量关联到同一个子集中, 并对每个关联子集进行算术平均融合完成融合状态估计. 仿真实验表明, 所提方法在有限感知范围的分布式传感器网络中能有效地进行多目标跟踪. 引 言 分布式传感器网络是由许多在空间上分布的, 相互连接的传感器组成, 且每个传感器在监测范围内有独立的检测能力和独立的计算能力. 相比于集中式多传感器, 分布式传感器网络具有可扩展性强, 环境适应能力强, 通信成本低, 抗局部节点故障能力强等优点. 因此, 分布式传感器网络已经被广泛的应用于多目标跟踪, 导航, 工业监控, 容错控制等领域. 一般而言, 利用分布式传感器网络进行多目标跟踪包含两个组成部分, 即多目标滤波过程和相邻传感器之间的信息通信融合, 如何设计合理有效的滤波融合方案是其关键. Mahler和Vo等在随机有限集(Random finite set, RFS)理论的基础上提出了一系列多目标跟踪滤波器, 例如概率假设密度 (Probability hypothesis density, PHD)滤波器, 势概率假设(Cardinalized PHD, CPHD)滤波器, 多伯努利(Multi-target multi-Bernoulli, MeMBer)滤波器等. 与PHD滤波器和CPHD 滤波器传递后验分布的一阶矩和势分布不同, MeMBer 滤波器将每个目标建模为伯努利RFS, 然后直接递归传递服从多伯努利分布的基于轨迹的近似后验多目标密度参数, 且在一段时间内维持多个伯努利分量, 每个伯努利分量都对应一个潜在的轨迹, 使得MeMBer滤波器的性能更优, 并且已经被成功运用到许多实际问题中. 随机有限集理论与方法的不断发展和完善也极大促进了分布式多目标跟踪研究. 特别是, 基于分布式传感器网络实现的MeMBer滤波器展现了优越性能. 分布式传感器网络协同滤波的关键在于相邻传感器之间的通信融合, 合理的通信融合方法能有效地提高目标跟踪性能. 目前, 基于信息平均共识的融合方法针对未知关联的分布式传感器网络表现出了鲁棒性和稳健性, 主要的平均共识融合方法有算术平均(Arithmetic average, AA)融合和几何平均(Geometric average, GA)融合方法. 其中, 基于广义协方差交叉(Generalized covariance intersection, GCI)的MeMBer 融合就是一种GA 融合方法, 又称为指数混合密度(Exponential mixture density, EMD) 方法, 该方法使得融合密度的K-L散度和最小化. GA融合方法容易出现重复计算问题且在局部传感器出现故障时会使融合性能下降, 基于AA融合方法能有效地进行鲁棒, 近似次优的分布式融合, 能够有效应对不同信源之间任意的关联关系, 且有较强的抗局部故障和高频漏检的能力, 近年来引起了国际学术界注意. 基于AA融合的分布式多目标跟踪器目前尚无中文文献报道. 然而目前在分布式传感器多目标跟踪设计中, 大多数都假设所有传感器有相同的检测能力和相同的感知范围. 在实际应用中, 每个传感器的感知范围或检测能力是有限的, 单个传感器只能对视野(Fields of view, FoV)范围内的区域进行检测, Gan Jonathan等将传感器的检测视野分为局部公共视野和外部视野, 然后对公共视野的后验PHD粒子集进行融合. 信息加权共识滤波器中通过对先验信息和量测适当的加权进行相邻传感器间的通信共享目标状态信息和局部信息, 最大化后验参数来进行有限感知范围(Limited sensing range, LSR)中的目标跟踪. 自适应分布式算法通过局部信息交换, 对当前得到的量测给予更高的权重调优增益, 从而实现目标状态估计. 李天成等通过AA融合方法实现有限传感范围的分布式PHD 滤波, 将传感器网络范围分为局部公共视野和外部视野, 对于局部公共视野部分通过粒子交换和局部扩散AA融合, 但未考虑非公共区域的互补融合. 李溯琪等通过相邻传感器之间的通信, 采用GCI融合方法实现有限感知范围的多伯努利多目标跟踪. 针对不同传感器视场重叠和非重叠导致的复杂的补偿性融合问题, 本文考虑通过对传感器的视场进行互补, 首次研究多伯努利滤波与AA融合在有限感知范围分布式多传感器网络中的多目标跟踪问题. 本文的主要解决的问题和方法创新在于: 1)由于传感器的FoV有限, 不能得到整个场景的量测信息, 提出视场互补原则弥补传感器FoV外的量测, 即对传感器FoV外的区域, 通过其他传感器的量测进行互补, 其中, 局部公共区域只能互补一次, 从而避免对同一区域进行重复互补以减少计算量, 同时还可避免滤波后多传感器后验信息融合进行复杂的补偿性融合问题. 2)针对多伯努利滤波中不同的伯努利分量代表不同的目标而不能直接对伯努利后验密度进行AA融合的问题, 采用伯努利关联AA融合方法, 即每个局部传感器单独运行MeMBer滤波并与相邻传感器通信共享后验信息, 对共享结果按距离划分进行伯努利关联将可能是同一目标的伯努利分量关联到同一子集中, 随后对不同的关联子集进行伯努利后验AA融合并完成融合状态估计. 3)最后通过序贯蒙特卡洛(Sequential Monte Carlo, SMC)方法实现所提出的多伯努利关联AA融合, 为了减少通信成本和计算成本以及满足伯努利关联的需要, 本文将粒子后验分布进行参数化转化, 从而实现高效的高斯参数通信与融合. 图 1 有限传感范围分布式传感器网络 图 2 分布式传感器网络与真实轨迹 图 7 多传感器多伯努利滤波AA融合仿真效果 作者简介 吴孙勇 桂林电子科技大学数学与计算科学学院教授. 2011年获西安电子科技大学信号与信息处理博士学位. 主要研究方向为多目标检测与跟踪, 阵列信号处理. E-mail: wusunyong121991@163.com 王 力 桂林电子科技大学数学与计算科学学院学生. 主要研究方向是多目标检测与跟踪, 多传感器信息融合. 本文通信作者. E-mail: wangli1581960594@163.com 李天成 西北工业大学自动化学院教授. 2013年获英国伦敦南岸大学博士学位, 2015年获西北工业大学博士学位. 主要研究方向为分布式信息融合, 协作移动机器人和目标检测, 跟踪和轨迹预测的数据驱动算法. E-mail: t.c.li@nwpu.edu.cn 孙希延 桂林电子科技大学信息与通信工程学院教授. 主要研究方向为卫星通信, 卫星导航. E-mail: sunxiyan1@163.com 蔡如华 桂林电子科技大学数学与计算科学学院副教授, 主要研究方向为小波分析, 信号处理和粒子滤波. E-mail: ruhuac@guet.edu.cn 伍雯雯 桂林电子科技大学数学与计算科学学院学生. E-mail: wuwenwen202101@163.com 相关文章 [1] 陈辉, 张星星. 基于多伯努利滤波的厚尾噪声条件下多扩展目标跟踪. 自动化学报. doi: 10.16383/j.aas.c201061 http://www.aas.net.cn/cn/article/doi/10.16383/j.aas.c201061?viewType=HTML [2] 陈辉, 邓东明, 韩崇昭. 基于区间箱粒子多伯努利滤波器的传感器控制策略. 自动化学报, 2021, 47(6): 1428-1443. doi: 10.16383/j.aas.c180541 http://www.aas.net.cn/cn/article/doi/10.16383/j.aas.c180541?viewType=HTML [3] 蔡如华, 杨标, 吴孙勇, 孙希延. 交互式箱粒子标签多伯努利机动目标跟踪算法. 自动化学报, 2020, 46(11): 2448-2460. doi: 10.16383/j.aas.c180069 http://www.aas.net.cn/cn/article/doi/10.16383/j.aas.c180069?viewType=HTML [4] 连峰, 侯利明, 刘静, 韩崇昭. 基于多目标均方误差界的多传感器控制算法. 自动化学报, 2020, 46(10): 2177-2190. doi: 10.16383/j.aas.c180251 http://www.aas.net.cn/cn/article/doi/10.16383/j.aas.c180251?viewType=HTML [5] 侯建华, 张国帅, 项俊. 基于深度学习的多目标跟踪关联模型设计. 自动化学报, 2020, 46(12): 2690-2700. doi: 10.16383/j.aas.c180528 http://www.aas.net.cn/cn/article/doi/10.16383/j.aas.c180528?viewType=HTML [6] 朱书军, 刘伟峰, 崔海龙. 基于广义标签多伯努利滤波的可分辨群目标跟踪算法. 自动化学报, 2017, 43(12): 2178-2189. doi: 10.16383/j.aas.2017.c160334 http://www.aas.net.cn/cn/article/doi/10.16383/j.aas.2017.c160334?viewType=HTML [7] 熊志刚, 黄树彩, 赵炜, 苑智玮, 徐晨洋. 均方根嵌入式容积粒子PHD多目标跟踪方法. 自动化学报, 2017, 43(2): 238-247. doi: 10.16383/j.aas.2017.c150881 http://www.aas.net.cn/cn/article/doi/10.16383/j.aas.2017.c150881?viewType=HTML [8] 张光华, 韩崇昭, 连峰, 曾令豪. Pairwise马尔科夫模型下的势均衡多目标多伯努利滤波器. 自动化学报, 2017, 43(12): 2100-2108. doi: 10.16383/j.aas.2017.c160430 http://www.aas.net.cn/cn/article/doi/10.16383/j.aas.2017.c160430?viewType=HTML [9] 齐美彬, 岳周龙, 疏坤, 蒋建国. 基于广义关联聚类图的分层关联多目标跟踪. 自动化学报, 2017, 43(1): 152-160. doi: 10.16383/j.aas.2017.c150519 http://www.aas.net.cn/cn/article/doi/10.16383/j.aas.2017.c150519?viewType=HTML [10] 陈辉, 韩崇昭. CBMeMBer滤波器序贯蒙特卡罗实现新方法的研究. 自动化学报, 2016, 42(1): 26-36. doi: 10.16383/j.aas.2016.c150182 http://www.aas.net.cn/cn/article/doi/10.16383/j.aas.2016.c150182?viewType=HTML [11] 李天成, 范红旗, 孙树栋. 粒子滤波理论、方法及其在多目标跟踪中的应用. 自动化学报, 2015, 41(12): 1981-2002. doi: 10.16383/j.aas.2015.c150426 http://www.aas.net.cn/cn/article/doi/10.16383/j.aas.2015.c150426?viewType=HTML [12] 杨峰, 王永齐, 梁彦, 潘泉. 基于概率假设密度滤波方法的多目标跟踪技术综述. 自动化学报, 2013, 39(11): 1944-1956. doi: 10.3724/SP.J.1004.2013.01944 http://www.aas.net.cn/cn/article/doi/10.3724/SP.J.1004.2013.01944?viewType=HTML [13] 沈乐君, 游志胜, 李晓峰. 自助重要性采样用于实时多目标视觉跟踪. 自动化学报, 2012, 38(10): 1663-1670. doi: 10.3724/SP.J.1004.2012.01663 http://www.aas.net.cn/cn/article/doi/10.3724/SP.J.1004.2012.01663?viewType=HTML [14] 姜明新, 王洪玉, 刘晓凯. 基于多相机的多目标跟踪算法. 自动化学报, 2012, 38(4): 531-539. doi: 10.3724/SP.J.1004.2012.00531 http://www.aas.net.cn/cn/article/doi/10.3724/SP.J.1004.2012.00531?viewType=HTML [15] 王相海, 方玲玲, 丛志环. 基于MSPF的实时监控多目标跟踪算法研究. 自动化学报, 2012, 38(1): 139-144. doi: 10.3724/SP.J.1004.2012.00139 http://www.aas.net.cn/cn/article/doi/10.3724/SP.J.1004.2012.00139?viewType=HTML [16] 闫小喜, 韩崇昭. 基于目标出生强度在线估计的多目标跟踪算法. 自动化学报, 2011, 37(8): 963-972. doi: 10.3724/SP.J.1004.2011.00963 http://www.aas.net.cn/cn/article/doi/10.3724/SP.J.1004.2011.00963?viewType=HTML [17] 蔺海峰, 宇峰, 宋涛. 基于SIFT特征目标跟踪算法研究. 自动化学报, 2010, 36(8): 1204-1208. doi: 10.3724/SP.J.1004.2010.01204 http://www.aas.net.cn/cn/article/doi/10.3724/SP.J.1004.2010.01204?viewType=HTML [18] 连峰, 韩崇昭, 刘伟峰. 未知杂波环境下的多目标跟踪算法. 自动化学报, 2009, 35(7): 851-858. doi: 10.3724/SP.J.1004.2009.00851 http://www.aas.net.cn/cn/article/doi/10.3724/SP.J.1004.2009.00851?viewType=HTML [19] 韩崇昭, 周彬, 元向辉, 连峰. 共同杂波环境下多目标量测数据的误差传递与校正. 自动化学报, 2007, 33(7): 771-774. doi: 10.1360/aas-007-0771 http://www.aas.net.cn/cn/article/doi/10.1360/aas-007-0771?viewType=HTML [20] 王明辉, 游志胜, 赵荣椿, 张建州. 强干扰环境下性能优化的相互作用多模型-概率数据关联算法. 自动化学报, 2001, 27(2): 267-271. http://www.aas.net.cn/cn/article/id/16132?viewType=HTML 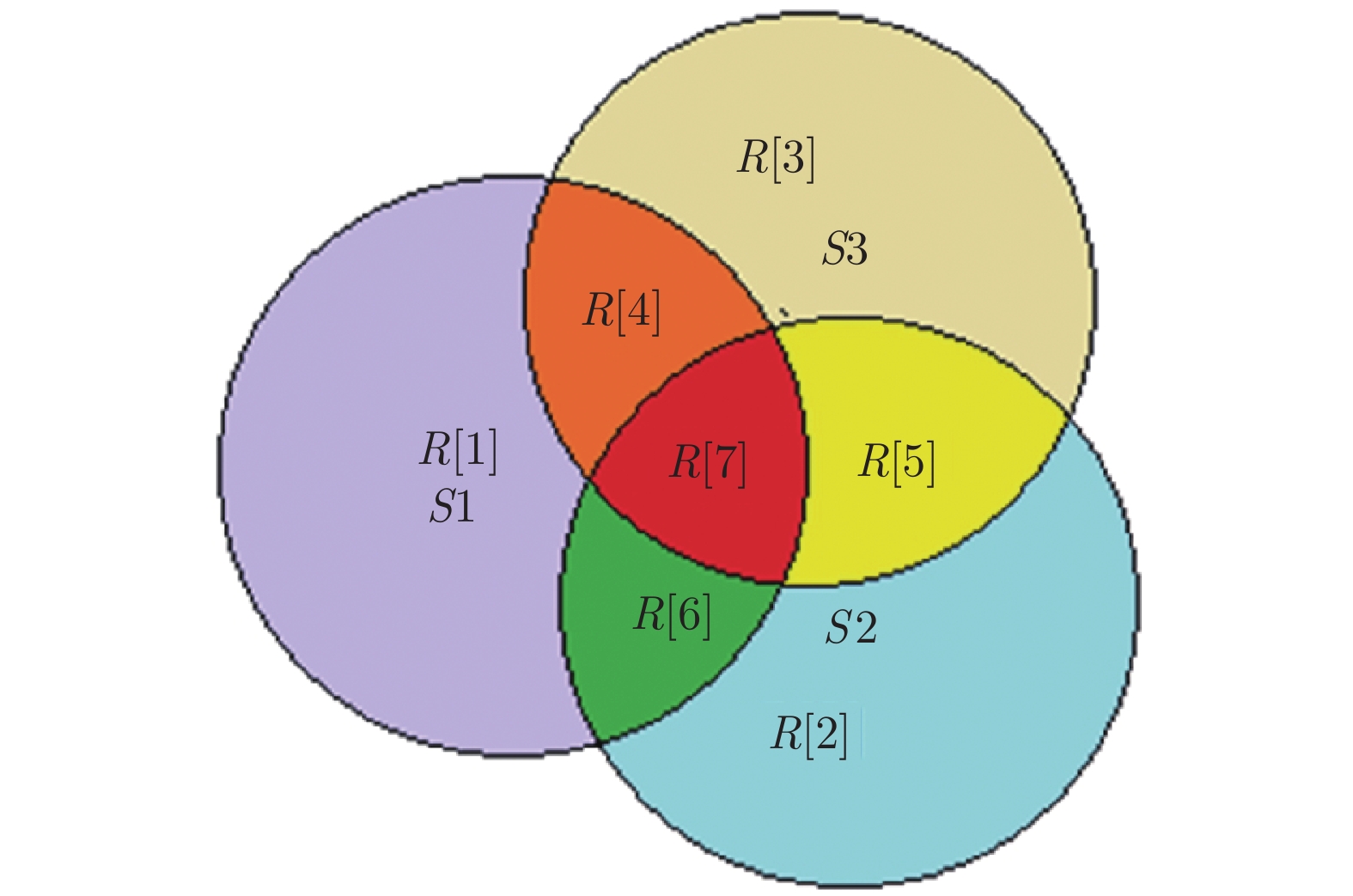
https://blog.sciencenet.cn/blog-3291369-1338381.html
上一篇:一类非线性系统模糊自适应固定时间量化反馈控制
下一篇:基于多节点拓扑重叠测度高阶MRF模型的图像分割