博文
一个新的模型预测控制算法:三项MPC
|
我自认为我们辨识算法做得很好。至于模型预测控制,自己不是专家,只好用常规的算法。我一直在等待控制学术界提出更先进的MPC算法,控制品质更高,更鲁棒。等了30年,很失望。学术界MPC的研究者大都是李雅普诺夫信徒。那么多聪明的头脑,天天在那里苦苦寻觅李雅普诺夫函数,不管控制品质的死活。哪怕是1%的人搞点高品质MPC算法也好啊。
直到最近,梆的一下,我们自己开发出一个新的模型预测控制(MPC)算法。这是我团队一位研发工程师提出的。经过深入研究,发现它比传统的MPC控制品质更高,且鲁棒性更强。
现有常规的MPC算法是一个两项的二次规划(QP)命题:
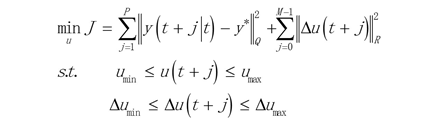
这里向量y(t)是被控变量(CV),向量u(t)是控制变量(MV),向量y*是被控变量的设定值,P是预测步长,M是控制步长,Q是CV的权重矩阵,R是MV的增量权重矩阵。注意该损失函数住包含两项:1)被控变量(CV)误差平方和;2)控制变量(MV)增量平方和。据我们所知,几乎所有的工业MPC算法都是两项MPC。
我们的工程师在开发算法时,大胆试了下面的三项损失函数:
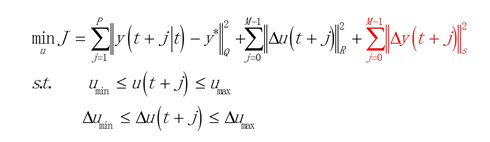
这里在损失函数中加了被控制变量(CV)增量平方和作为第三项,S是CV增量权重矩阵。引入第三项的动机是遏制被控变量的震荡。
上图吧。
![]()

图中左边是系统的开环阶跃响应;中间是闭环阶跃响应比较,红线是三项MPC的阶跃响应,黑线是两项MPC的;右边是控制动作比较。开环系统动态特性比较复杂,有震荡还有较大时延。由中图可知,比起两项MPC,三项MPC阶跃响应又快有平滑,说明控制品质高;同时右图显示三项MPC的控制动作更小,显示鲁棒性强。
我们建立了三项MPC和两项MPC的等价关系,由此理解了控制品质改进的机理。我们还提出了一个比较两种结构控制器品质和鲁棒性的方法。基于此,我们从理论上证明三项MPC比两项MPC控制品质更高且更鲁棒。更重要地,我们在一台100万千瓦超超临界发电机组成功实现了工业应用。在文献综述时,我们发现十几年前有几篇文章提出过三项MPC算法并做了简单的仿真演示。这些工作被完全忽视。
我们把这些结果写成文章投到一个偏应用性的控制期刊。不料一位审稿人是李雅普诺夫信徒,要求我们证明李雅普诺夫稳定性。我说我们工业MPC用有限时域算法,无法用李雅普诺夫稳定性理论;工业MPC系统闭环稳定性是用计算机仿真和现场试验验证的。然后就被他拒绝了。
鬼迷心窍的李雅普诺夫信徒们,自己做不出高品质MPC,也不准别人搞。控制学术界被他们活活搞死了。无李雅普诺夫不文章,这跟中国封建社会的文字狱差不多了。
我很欣赏李雅普诺夫稳定性理论,但是很讨厌把李雅普诺夫神化的信徒。试想如果AI领域由李雅普诺夫信徒们把持,能有今天的AI吗?李雅普诺夫稳定性理论,当作一个学派研究一下就行了。不能让一个理论统治整个控制学术领域。应该是搞稳定性的研究稳定性,搞算法的研究算法,百花齐放百家争鸣,而不是搞稳定性的高于搞算法的。工业界认为MPC是最强大的控制技术,成功应用40年,使用有限时域,不用李雅普诺夫稳定理论。打脸了吧。建议李雅普诺夫信徒们常下工厂看看。
我们投到另一个期刊,很快就接受发表了。在此要感谢CEP的编辑和审稿人。
文章在这里:
Yun Zhu, Kangkang Zhang, Yucai Zhu, Pengfei Jiang, Jinming Zhou (2024). Development of a three-term MPC and its application to an ultra-supercritical coal fired power plant. Control Engineering Practice, Vol. 143, 105787.
https://blog.sciencenet.cn/blog-862928-1418258.html
上一篇:系统辨识的故事7:系统辨识是工业智能的灵魂
下一篇:系统辨识的故事8:动态数据智能