博文
Nano Res.[器件]│用于水下机器人爪夹的基于液态金属型摩擦纳米发电机的三维触觉掌心传感器
||
背景介绍
与传统的人工打捞方式相比,水下机器人在灵活性和准确性上具有显著优势。它们能够更加高效地完成水下打捞任务,并且可以避免人员在远洋作业中面临的溺水、生物袭击和水下缠绕等安全问题。在水下机器人的各种打捞方式中,爪夹式抓取广泛应用于海洋资源开发、远洋救援和潜艇建造等领域。然而,目前的爪夹式抓取技术面临着精准控制抓取力的挑战:抓取力不足可能导致无法抓起被打捞物体,而抓力过大则可能对被打捞物体造成损坏。为了解决这一问题,亟需开发一种能够实时监测爪夹抓力大小的传感器,以更好地完成打捞任务。
研究方法
文献调研→发现问题→提出优化→器件制作→实验验证 。
成果简介
近日,大连海事大学徐敏义教授团队针对如何精准控制水下爪夹抓取力的问题,提出了一种用于水下机器人爪夹的基于液态金属型摩擦纳米发电机的三维触觉掌心传感器(adistributed liquid metal-based three-dimensional biomimetic underwater triboelectric palm-like tactile sensor ,下称UPTS)。该传感器由柔性盖,5个独立的传感单元,柔性支撑以及3D打印的固定壳体组成,本文开展了关于UPTS的陆上和水下实验,其中陆上实验的结果表明UPTS能准确识别外力的大小、方向和作用面积,定位精度在5度以内,即使在高频接触的场景中也能保持稳定。水下实验的结果表明UPTS可以在水中区分物体的硬度和形状,对实验用的3种硬度的材质区分准确率达到100%,对4种形状的区分准确率高达99.75%。实验结果表明,在一定范围内UPTS不仅可以实时监测爪夹抓力大小,还能有效的分辨出被抓物体的硬度和形状,这对于爪夹的抓取功能具有重要意义,为海洋科学研究提供更精准的数据支持。
图文导读
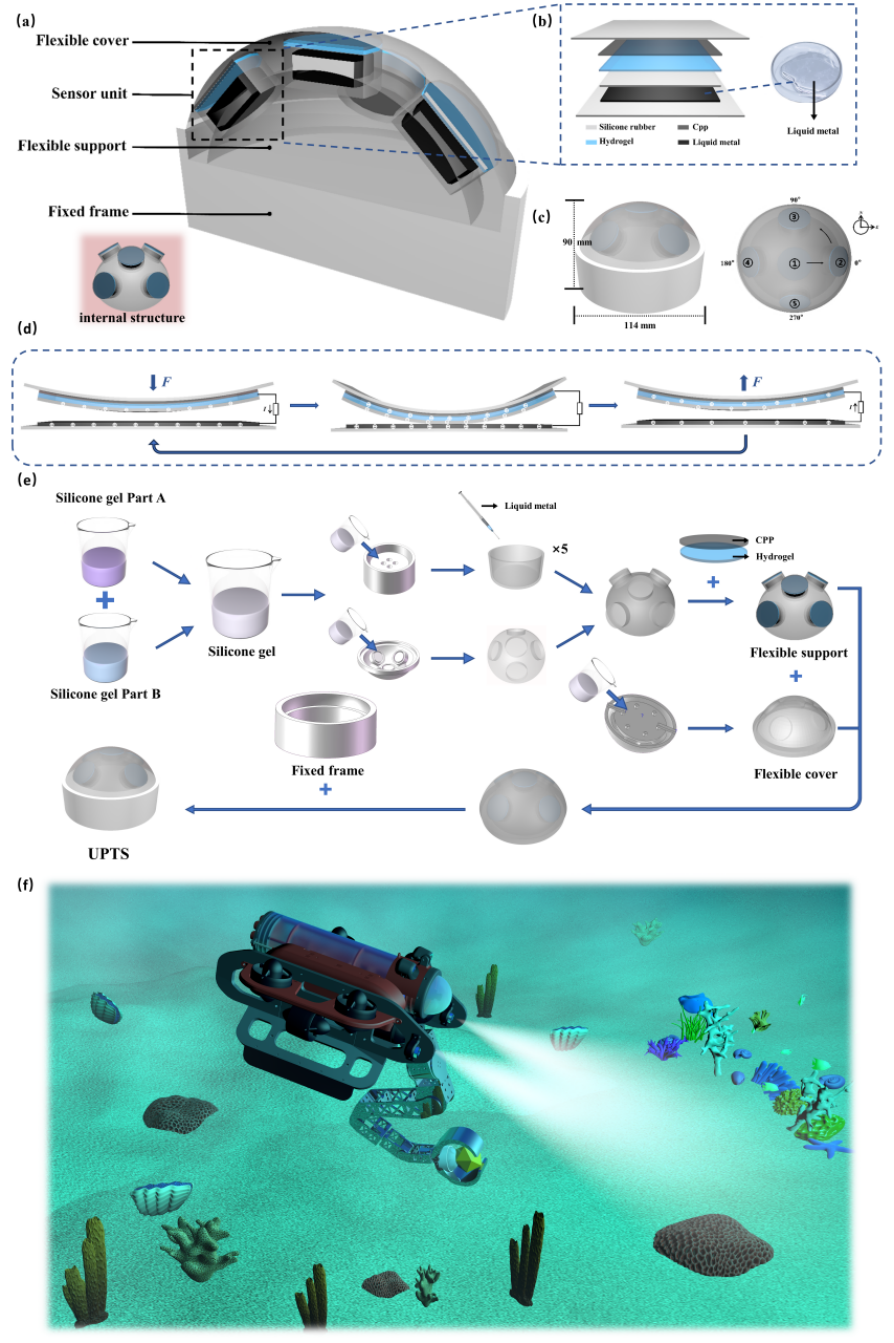
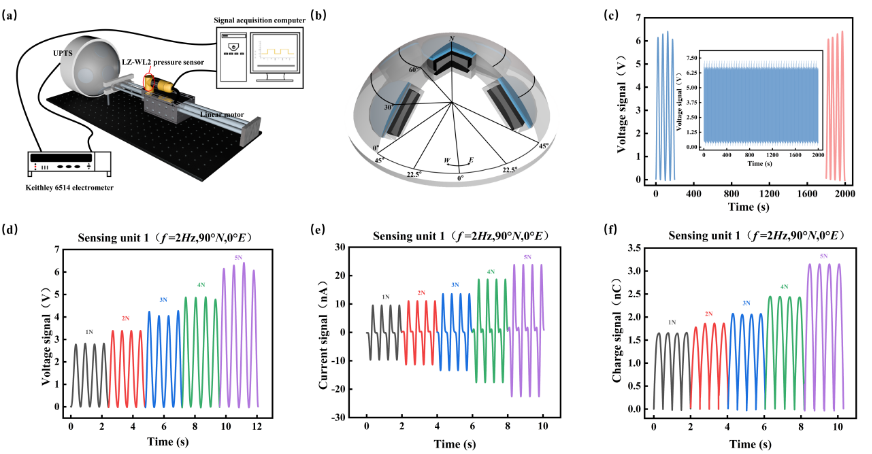
图2:UPTS陆上实验台及负载测试。(a) UPTS陆上实验台;(b)柔性盖表面经纬线标注;(c)UPTS半小时耐久性试验;(d)外加负载大小从1N到5N的开路电压;(e)外加负载大小从1N到5N的短路电流;(f)外加负载大小从1N到5N的短路电荷。
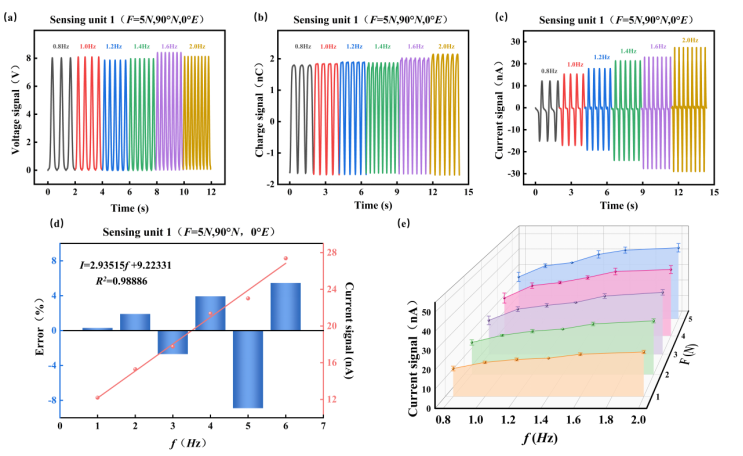
图3 :UPTS的输出特性。(a)外加5N负载0.8Hz~2Hz下的开路电压;(b)外加5N负载0.8Hz~2Hz下的短路电荷;(c)外加5N负载0.8Hz~2Hz下的短路电流;(d)碰撞频率与电流的线性关系;(e) UPTS的输出电流、负载压力与碰撞频率之间的关系。
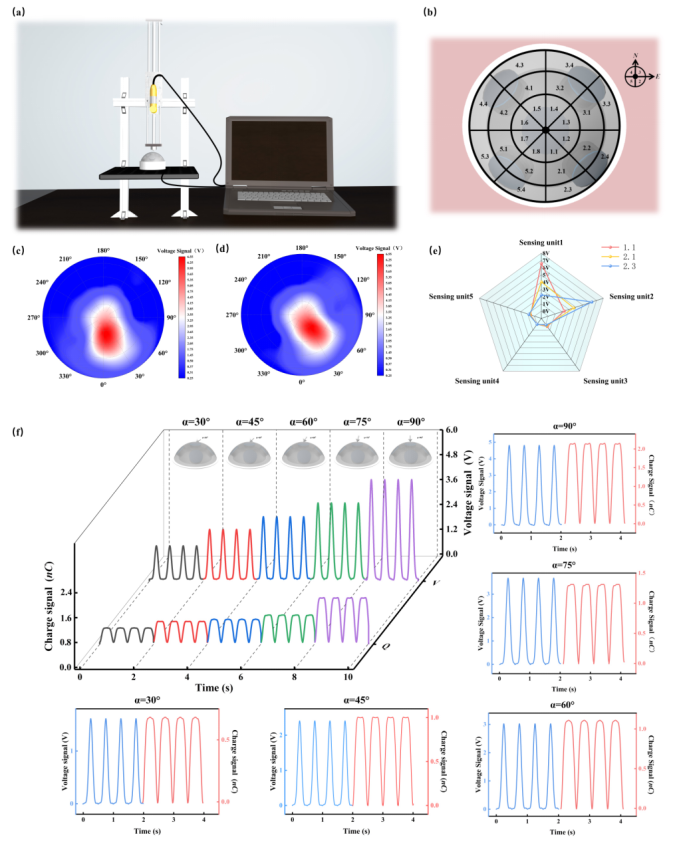
图4:UPTS在动态载荷定位中的应用;。(a) UPTS方位角及攻角试验台;(b) UPTS上表面区域划分;(c) UPTS在1.1区域模拟时的电压应力图;(d) UPTS在1.2区域模拟时的电压应力图;(e) UPTS传感单元在1.1、2.1和2.3区域模拟时的电压信号雷达图;(f) UPTS在不同攻角下的电压和电荷图。
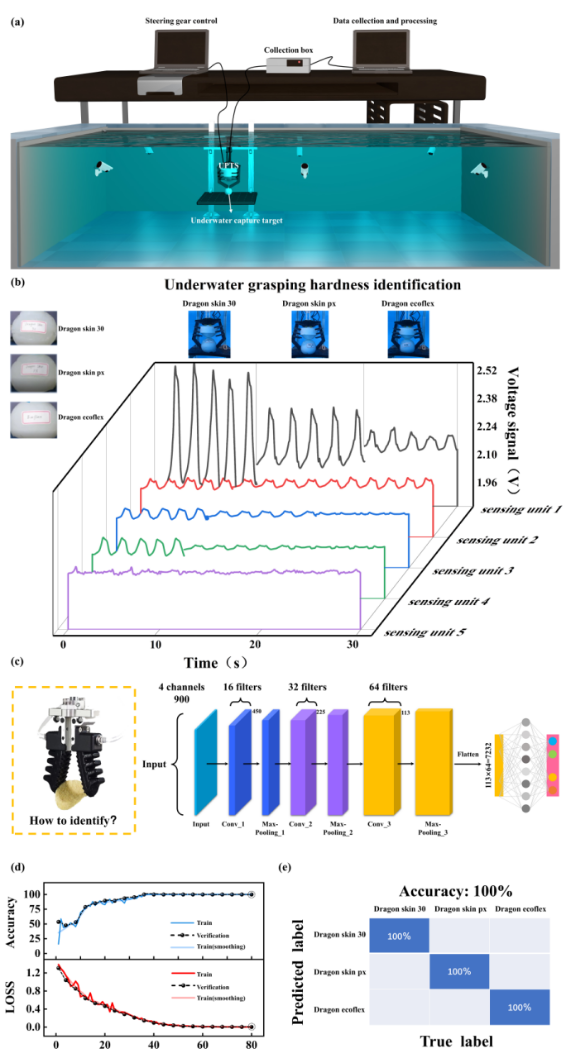
图5:UPTS水下试验台及硬度识别。(a)水下物体硬度识别实验平台;(b)不同硬度条件下UPTS五个传感单元的输出电压图;(c)卷积神经网络训练模型的详细结构;(d)训练进度和损失图;(e)硬度识别混淆矩阵。
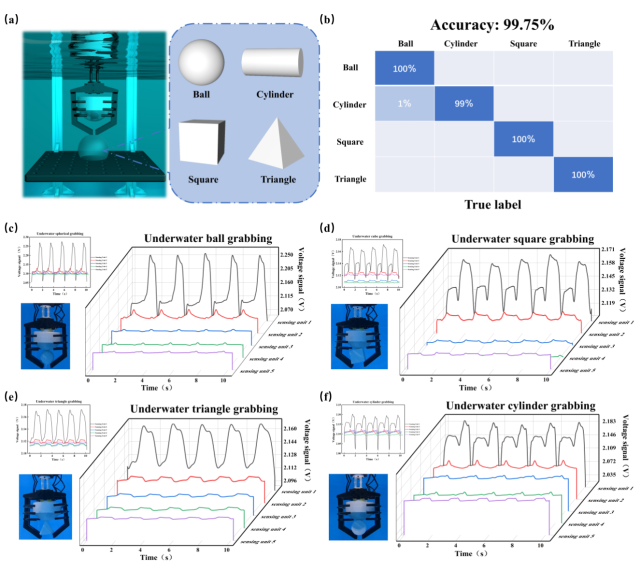
图6:UPTS物体形状识别。(a) UPTS水下物体形状识别实验平台;(b) 形状识别混淆矩阵;(c) UPTS水下球形抓取时电压输出信号图;(d) UPTS水下立方体抓取时电压输出信号图;(e) UPTS水下三角形抓取时电压输出信号图;(f) UPTS水下圆柱体抓取时电压输出信号图。
作者简介
论文的第一作者为大连海事大学轮机工程学院硕士生李原正,共同第一作者为大连海事大学轮机工程学院硕士生刘搏,共同通讯作者为大连海事大学轮机工程学院宋立国副教授、北京大学工学院博士后徐鹏和大连海事大学轮机工程学院徐敏义教授。
徐敏义教授课题组近年来主要从事基于船舶与海洋工程领域能量捕获及自驱动传感,水下能量捕获与信息感知,水下智能机器人等方面的研究工作。徐敏义教授2012年毕业于北京大学,2016-2017年赴美国佐治亚理工学院访学(导师:王中林院士),2021年创建了大连市海洋微纳能源与自驱动系统重点实验室,主持了包括国家重点研发计划专项课题、国家自然科学基金在内的国家级及省部级项目等10余项,入选中国科协青年人才托举工程、交通运输部青年科技英才、辽宁省“兴辽英才计划”青年拔尖人才等人才工程,获省部级及以上奖励4项。近五年来,在Nature Communications、Research、Advanced Energy Materials、Nano Energy、ACS Nano、Applied Energy等中国科学院大类1区Top期刊发表论文48篇,其中影响因子大于10的论文41篇,ESI高被引论文2篇。
文章信息
Li Y, Liu B, Xu P, et al. A palm-like 3D tactile sensor based on liquid-metal triboelectric nanogenerator for underwater robot gripper. Nano Research, 2024, https://doi.org/10.1007/s12274-024-6903-3.

识别二维码或点击左下角“阅读原文”可访问全文

https://blog.sciencenet.cn/blog-3563286-1450532.html
上一篇:Nano Res.[能源]│清华大学刘凯课题组系统性总结提升锂基电池中固态聚合物阻燃电解质策略
下一篇:mLife | 一种基于机器学习算法挖掘嗜盐蛋白的方法HPClas