博文
Drones 北京航空航天大学航空科学与工程学院——小型磁异探测无人机的低电磁干扰综合设计方法  精选
精选
||
导读
搭载机载磁异常探测器 (MAD) 的小型无人机 (UAV) 是一种新兴的地下或海底磁异常探测组合。无人机平台产生的电磁干扰 (EMI) 会影响MAD对弱磁信号的采集,这给该类无人机的总体设计带来了独特的困难。基于此,北京航空航天大学航空科学与工程学院向锦武院士,李道春教授和葛佳昊博士后在 Drones 期刊发表了文章,揭示了低电磁干扰设计与飞行轨迹之间的密切关系,提出了一种针对小型固定翼无人机的系统化、集成化的低电磁干扰设计方法,可为小型固定翼无人机磁异常探测的概念设计和轨迹优化提供参考 (图1)。
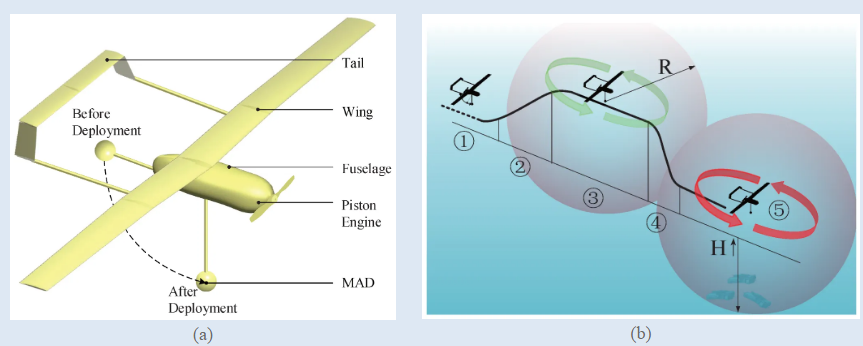
图1. 小型磁异探测无人机。(a) 鸥翼无人机概念图;(b) 典型任务剖面。
研究过程与结果
以海洋磁异常检测为典型场景案例,作者提出了一种总体设计框架,包括四个主要模块,如图2所示。该框架将综合设计步骤概括为五个步骤:首先,根据任务要求,确定有效载荷质量,并选择合理的巡航速度,以确保在风干扰下的有效搜索地速。第二,结合飞行时间要求并设计有效载荷质量,进行无人机总质量迭代,以获得收敛的全机质量估计值。第三,提出了一种MAD展开式部署方法。以飞行稳定性为代价函数对无人机布局进行优化。然后,对无人机进行详细设计,包括翼型选择、机翼设计等,不断迭代计算升阻比以匹配最终气动设计结果。第四,针对多无人机协同搜索任务,分析了三种典型编队的电磁干扰相互干扰、搜索宽度和漏检情况。最后,基于海洋产生的背景电磁干扰,选择最佳飞行高度。然后,基于无人机电磁干扰与搜索轨迹的耦合关系,优化搜索轨迹的航向和姿态。
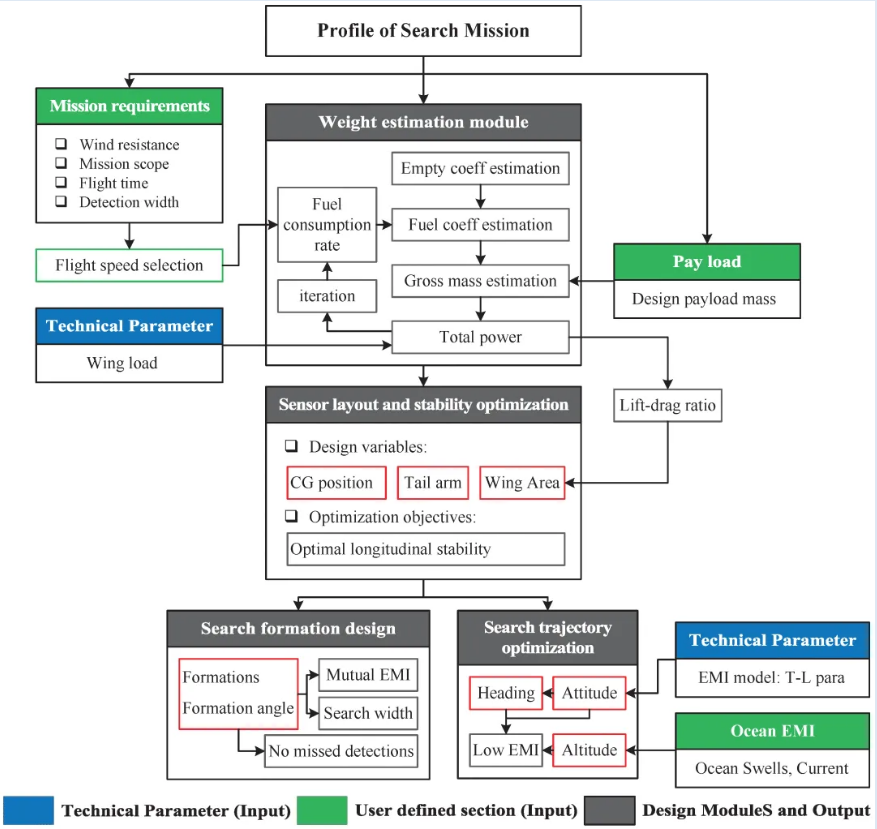
图2. 总体设计框架
需要注意和强调的是,磁异探测无人机设计是复杂而全面的系统工程。虽然本文以海洋磁异检测为典型场景案例,但实际上,所有航空磁异常检测都有类似要求。这是因为航空探测既需要保持对测线的稳定性要求,又需要避免额外的背景电磁干扰。根据现阶段的地面测量和实验,机体电磁干扰的主要来源是金属机身部件在地磁场的磁化及其运动时对地磁场的切割。这些金属部件主要包括活塞发动机、起落架、金属连接器和紧固件等。此外,常用的含镍量为8%—14%的合金,如某些螺钉和螺母中,会放大磁干扰。因此,未来先进的非金属材料的应用可能会降低机身的电磁干扰强度。同时,还需要开发一个匹配的EMI模型。
研究总结
由小型无人机携带MAD执行磁异信号搜索任务是一种有效的方法,但无人机自身和环境背景激励的电磁干扰会影响MAD的探测效果。本文主要研究小型固定翼磁异搜索无人机的低电磁干扰技术,包括传感器布局设计、稳定性优化、多无人机编队选择和搜索轨迹设计。本文提出了一种基于传感器可展开的鸥翼布局无人机,并对其稳定性进行了优化,这不仅可以降低MAD处的电磁干扰,还可以提高无人机在海洋恶劣环境的飞行稳定性。多无人机协同编队协同可以提高搜索效率,线型编队可以有效避免机间电磁干扰的同时,确保最大的探测深度。此外,搜索轨迹,如航向设计,对MAD的探测效果有很大影响。飞行高度应根据海况具体选择,以避免海浪与海流电磁干扰影响。合理的飞行航向选择可以大大降低无人机平台在MAD处的电磁干扰。当无人机下降高度以近距离确认探测时,应注意飞行高度,即俯仰角应小角度且缓慢变化。
未来,通过改进EMI模型,可以进一步改进无人机布局和轨迹设计,使其更加可靠。小体积存储和快速发射/回收的设计也将有助于此类无人机在民用甚至军事领域的广泛应用。
阅读英文原文:https://www.mdpi.com/2885824
进入期刊英文主页:https://www.mdpi.com/journal/drones
Drones 期刊介绍
主编:Prof. Dr. Diego González-Aguilera, University of Salamanca, Spain
期刊主要涵盖无人机、无人机系统、远程驾驶航空器系统、水下无人机、无人地面载具、全自动驾驶和太空无人机等相关的最新科学技术及应用。目前期刊已被EI,Scopus和SCIE (Web of Science) 数据库收录,位于Q1分区。
2023 Impact Factor:4.4
2023 CiteScore:5.6
Time to First Decision:21.7 Days
Acceptance to Publication:2.8 Days


https://blog.sciencenet.cn/blog-3516770-1450556.html
上一篇:Agronomy:扬州大学园艺园林学院刘头明教授等创建特刊——辛辣作物的遗传学、基因组学和育种
下一篇:Biomolecules:哈尔滨医科大学孙备教授团队——急性胰腺炎病程中肠道微生物组与胰腺的相互作用