博文
【人工智能】机器人的未来发展:从工业自动化到知识自动化
|||
【人工智能】机器人的未来发展:从工业自动化到知识自动化

【导读】智能时代的核心技术将是知识自动化,因此必须从一开始就加快、加强以软件形态为主的知识机器人的研发与应用,尽快形成软件和物理形态平行互动的新型机器人系统,并以此为突破口,引发下一代智能机器人的迅速发展。 王飞跃院长重点围绕软件机器人、知识机器人、平行机器人和相关的机器人学,对机器人发展的历史与趋势进行了简要的探讨。
机器人的未来发展:从工业自动化到知识自动化
王飞跃
【摘要】 重点围绕软件机器人、知识机器人、平行机器人和相关的机器人学,对机器人发展的历史与趋势进行了简要的探讨。主要观点如下:1) 在加强和提高现有工业机器人,特别是以物理形态为主的机器人技术与应用的基础上,必须重视以软件形态为主的机器人,特别是知识机器人和虚实互动的平行机器人技术的发展;2) 工业机器人曾在工业自动化过程中发挥过重要作用,知识机器人的未来是知识自动化,必将在智能产业中起关键和核心作用,连通物理、社会和信息空间,使工业制造系统从过去的牛顿式机械系统成为默顿式智能系统,这就是未来机器人发展的主要特征。
【关键词】机器人;机器人学;软件机器人;知识机器人;云机器人;平行机器人;知识自动化;智能产业
近年来,机器人技术的研究与应用在全球范围内得到了各发达国家的空前重视,从美国的“国家机器人计划”、欧盟的“SPARC机器人研发计划”,到日本的“机器人新战略”等,充分表明机器人技术对发展国家实力和保障国家安全的重要性。长期以来,中国相关部门对机器人技术的研发也给予了很大的支持,尤其是自2014年起,在各级政府的推动下,我国机器人产业的发展呈爆发式增长,一场中国式的机器人“大跃进”势不可挡。
据报道,2014年中国工业机器人市场销量达5.7万台,与2013年的3.6万台同比增长55%,约占全球市场总销量的1/4。中国已经连续两年成为全球第一大工业机器人市场,但其中2013年国内企业仅占中国市场销量的15%左右。另据国际机器人联合会(IFR)统计,2005—2014年间,中国工业机器人市场销售量的年均复合增长率为32.9%,而2004—2013年间为29.8%。预计到2017年,工业、服务和特种机器人的全球市场规模将达到750亿美元,并带动相关产业上千亿美元的增长。该统计同时还指出,2013年,中国每万名制造业从业人员机器人保有量仅为25台,而世界平均水平为58台,其中韩国396台、日本332台、德国273台。对于机器人应用最多的汽车行业,先进汽车生产国的工业机器人使用密度均己达到1000台/万人,而中国仅为213台/万人。
因此,在目前的形势下,如何进一步健康有效地发展机器人技术,是一个必须关注的重要问题。人才培养、深入应用、让机器人在产品产业的转型升级中切实发挥作用,是大家公认的正确途径。同时,本文认为,除物理形态的机器人之外,应更加注重软件形态的机器人技术的发展与应用,吸取计算机技术发展过程中“重硬件、轻软件”所造成的信息技术与产业长期整体落后的惨痛教训,避免重蹈覆辙。工业时代的核心技术是工业自动化,物理机器人正起着越来越重要的作用;但智能时代的核心技术将是知识自动化,因此必须从一开始就加快、加强以软件形态为主的知识机器人的研发与应用,以软件机器人的发展促进物理机器人的升级,尽快形成软件和物理形态平行互动的新型机器人系统,并以此为突破口,引发下一代智能机器人的迅速发展。
1 物理机器人:功能智能化与深度化
第一台可编程工业机器人Unimate源自George Devol 1954年的专利Unimation,即通用自动化(universal automation)之意,由Joseph Engelberger主持试制生产,1961年完成并用于通用汽车公司(General Motors, GM)的压铸生产线。1978年,他们又推出用于组装生产的PUMA(Programmable Universal Machine for Assembly)机器人,这才真正启动了工业机器人的时代。随即,以George N. Saridis为首的自动化与智能控制学者进入机器人领域,于1984年创立“IEEE机器人与自动化委员会”,3年后转为“IEEE机器人与自动化学会(RAS)”,今天已成为全世界机器人领域最大最具权威的学术研发与应用专业人士的组织。
从发展历程来看,机器人技术的研发与应用在20世纪80年代后期至90年代中期达到了一个历史性的高潮(图1为本文作者当时在美国亚历桑那大学机器人与自动化实验室进行实验,领导团队于1992实现了通过互联网从法国和日本远程控制实验室的工业机器人),逐渐从工业制造向国防、救援、医健、娱乐、家庭、教育、生物等方向扩展,形成了工业机器人、服务机器人和军事特种机器人等分支。但核心技术基本相同,而且都是以机电一体化的物理形态机器人为主,机器人软件开发、机机通讯、人机交互等重要但非主流方向[7]为辅。20世纪90年代后期,由于科技发展的热点转向网络技术的研发与应用,机器人相关工作受到一定冲击,一度进展缓慢,人才流失严重。进入21世纪后,随着机器人和无人机在美军反恐战争中的有效部署、特种手术机器人的成功应用、无人车的重大突破,特别是智能技术的迅猛兴起与融合贯通,物理机器人的研发与应用也进入了一个新的历史阶段和高潮。
除传统的机电传感、规划控制、协调执行等研发方向之外,物理形态机器人的最近工作呈现许多新的趋势,例如:1) 人机交互、人机共同操作(Co-manipulation)、人机安全等;2) 软体机械人,从柔性机械臂向软性材料构建的机器人发展,对各种性能的人工假肢、人工关节和驱动型人工肌肉的开发;3) 小至体内检测、释药、手术的体内医用机器人,大至管道检测维护和岸边或离岸的巨型机器人等多种多样的特种机器人系统,还有更多种类的先进机器人武器等;4) 以无人车或智能车为代表的移动机器人更为引人注目,各大汽车制造厂家纷纷介入,推出自己的相应产品或演示系统,机器人汽车或许不久将成为现实;5) 机器学习、SLAM、概率图方法、多源数据深度融合、自然语言处理等智能技术方法广泛用于机器人的研发和应用,特别是己经成为数据驱动的机器人和人形机器人等的兴起及发展之关键。。由这些文献可以看出,物理形态的机器人的研发正朝着功能的精化、可靠、高效和智能化方向发展。

图1 20世纪90年代初本文作者在亚利桑那大学机器人与自动化实验室工作,图中有2个PUMA工业机器人和1个三菱教学机器人
2 软件机器人:系统虚拟化与云端化
软件机器人的历史起源很难清楚地界定,虽然与机器人仿真、胞式机器人(cellular robots)、元胞自动机(cellular automata)等密切相关,但这些从未被正式地以“软件机器人”称之。事实上,英文“software robots”或“software robotics”很少被专业地使用,至少没有专业上的界定或学术定义。一般认为:“software robots” 就是“bot、web bot、web crawler、spider”等软件的统称,就是网上数据的搜索、下载、复印等软件程序而已。近来,Siri、Cortana、 “小冰”、“小度”或“小i”等聊天问答软件的出现,更被大众视为“软件机器人”的代表和象征。
事实上,网络化机器人的出现和发展应被视为软件机器人的真正开始。20世纪80年代,通用汽车公司在已有工业机器人应用的基础上,提出“制造自动化协议(manufacturing automation protocol,MAP)”工程以及相应的基于EIA-1393A通讯协议的MMFS(Manufacturing Message Format Standard)标准。由于MMFS无法满足由不同厂家的机器人、数控机(NC)、可编程控制器(PLC)等组成的过程控制系统(PCS)的通信要求,制造报文规约(manufacturing message specification,MMS)应运而生,成为“虚拟制造装置(virtual manufacturing device, VMD)”之间通讯的标准,最终演化为国际标准ISO-9506,为网络化机器人系统,进而软件机器人的形成和实际应用创造了基础条件。
MAP/MMS之后,特别是在WWW使基于TCP/IP的HTTP得到广泛应用之后,网络化机器人系统才真正起步。20世纪90年代初,基于互联网的工业机器人系统雏形出现,如通过电子邮件和网页控制的PUMA和其他机器人系统,并逐渐发展成“网络机器人学(networked robotics)”这一新领域。 至20世纪90年代末,又提出了远程脑化机器人(remoted brained robots)等概念,并进一步演化成与生物或人类大脑交互的网络控制机器人等相关研究方向。
2001年,IEEE RAS创立“网络机器人专业委员会”,以推动相关研究。同时,自动化领域也开展了网络化控制等相关方向的工作,如基于代理的控制方法(agent-based control,ABC)等。代理,特别是移动智能代理的引入,加快了从网络机器人向软件机器人转化的进程。2009年,欧盟的“机器人地球(RoboEarth)”项目启动,目标宏大:提出要建立机器人自己的WWW,形成一个关于机器人的巨大网络和相关数据、知识和算法的机器人世界,让机器人可以在RoboEarth里共享信息并相互学习各自的行为和环境。图2给出RoboEarth的系统构架,相关功能模块清晰地显示了机器人软件从实质上开始了向软件机器人的转化过程。云网络、云计算等等,如Rapyuta平台,已在此项目中发挥重要作用。

图2 机器人地球(RoboEarth)系统框架
2010年,James Kuffner正式提出“云机器人(Cloud Enabled Robots)”和“云机器人学(Cloud Robotics)”的概念与术语,并阐述了其可能的优越之处。这一提议,很快得到了业界的支持,虽然Kuffner没有使用软件机器人一词,但这标志着软件机器人已经与物理机器人分离,入驻云端,成为一个独立的机器人研发与应用领域。
物联网、大数据、云计算为云机器人控制建立了起飞的基础,而机器学习、人工智能、智能控制等智能技术,特别是众包(包括人类的众包和机器的众包)又为云机器人构筑了起飞的平台并提供了发展的动力。但云机器人的发展也面临着诸多挑战,如在隐私与安全方面,存在着许多与法律和道德相关的约束,以及易受黑客和计算机病毒攻击等重要问题必须解决。技术上也存在网络引起的可靠性、服务质量、性能效率、算法设计等问题。很明显,基于代理的网络控制和管理方法,特别是“当地简单,远程复杂”的网络云系统设计原理,可以从IaaS、PaaS、SaaS这3个层面来应对这些挑战。
然而,软件机器人的深入和进一步发展,必须将机器人的物理形态与软件形态进一步分离,同时在分离的基础上更加深度地融合,因此,必须考虑知识机器人和平行机器人。
3 平行机器人:互动可视化与个性化
2011年,文献引入网间机器人(web surrogates)、知识机器人(knowledge robots)、平行机器人(parallel robotics)等概念,试图将机器人从CPS(cyber-physical systems)空间推向CPSS(cyber-physical-social systems)空间,从牛顿式的机械物理机器人,迈向默顿式的智能平行机器人,使机器人也普及成为RaaS(robot as a service)式的实时、互动,而且网络化、可视化和个性化的产品。最终,使机器人从主要服务于工业自动化,逐步发展演成为促进知识自动化的主力。
图3给出平行机器人的框架,主要由2个对应体和3个功能块组成。首先是一般意义下实体形态的物理机器人,其次是特别意义下虚拟形态的软件机器人,或软件定义的机器人(Software Defined Robot, SDR)。软件机器人SDR不但刻画了机器人的规格和性能,还以可视化的手段提供了机器人的其他详细信息,主要包括维护、维修、备件、更新、服务、新算法、新应用等网络化实时知识,使对应的物理机器人的操作与保养变得简单而且经济、方便、可靠。换言之,SDR就是实际物理机器人之“活”的本体知识描述、可视化的信息中心,可以放在云端,也可以放在手机端或其它客户端,是云机器人的具体化、个性化和专门化的体现,也是类似于RoboEarth项目发展的必然结果。通过软件机器人和物理机器人的对应和平行互动,可以实现下面3个主要的功能模块:
1) 机器人的学习与培训——这既可以是机器人的操作员,也可以是机器人本身的学习与培训。可以是操作人员利用SDR学习使用机器人,也可以是机器人本身学习新的控制算法或智能技术。此时,RoboEarth中所提供的虚拟工作环境和互学习功能可以被充分的利用,众包式的人类计算手段也能够得到更加完美的发挥。
2) 机器人的实验与评估——同理,可以是操作员或机器人本身进行的各类“计算实验”或“计算实践”,以此对机器人的轨迹规划、任务排序、安全检测等程序进行分析与评估,借以降低成本、遵守法规、合乎模式等等。目前的机器人图形编程和可视化规划,正是这一功能模块的初型。
3) 机器人的管理与控制——通过物理和软件机器人的虚实平行互动,在CyberSpace中形成一个关于任务执行的大闭环系统,从而可以利用虚实互动自适应的反馈方式,使平行机器人系统更加准确快速地完成指定的任务,实现对机器人系统的智能控制与管理。
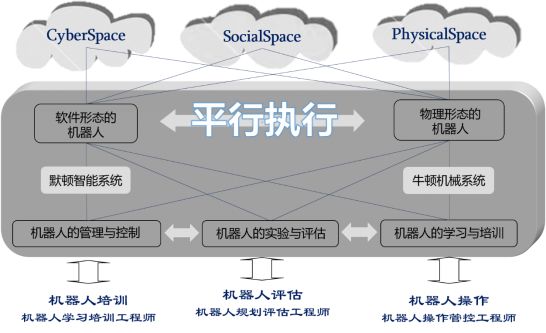
图3 平行机器人框架
显然,利用平行机器人的框架和运营机制,可以方便地将生产制造的物理空间、消费服务的社会空间、数据知识的信息空间连通,进而使平行机器人成为基于CPSS,而非仅仅是基于CPS的智能机器人。一定程度上,平行机器人可视为封装的O2O(O2O in a box)。而且,这种面向智能产业的新型机器将为人类社会产生新的工种,就像计算机产生新的工作岗位一样,如机器人学习与培训工程师、规划与评估工程师、操作与管理工程师等等,绝非是简单的“机器换人”,而是“机器扩人”、“机器渡人”、“机器化人”等,使社会更加智能、高效、舒适和安全。
4 从工业自动化到知识自动化:牛顿机与默顿机
在工业时代,受效益驱动,加上生产制造任务的不定性、多样性和复杂化等,促生了工业自动化和工业机器人。随着社会的不断进步发展,知识工作,特别是涉及网上的数据处理、信息操作、知识运营等工作也变得更加不定、多样、复杂,因此更加迫切地需要知识机器人,也只有这样,才能真正迈入一个知识经济和智能社会。知识机器人,如上述的平行机器人系统,正是进入这一新社会形态的一种关键且核心的工具和手段。
如图4所示,利用平行机器人形式的知识机器人系统,可以将物理世界中物理形态的机器人和虚拟或云端世界中软件形态的机器人融合起来,如同实数和虚数的融合打通整个数域,通过社会网络和物联网络连通形成虚实互动的机器人平行世界,即:
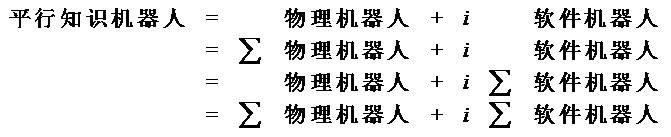
如此就可以形成虚实一一对应、一多对应、多一对应、多多对应式的新型工业机器人、服务机器人、特种机器人系统等等,使智能机器人在处理不定、多样、复杂的知识工作任务和流程的时候,具有深度知识支持的灵捷、通过实验解析的聚焦以及反馈互动自适应的收敛等能力,进而完成从工业自动化向知识自动化的转化。
必须指出的是,在这一转化过程中,必须考虑以前工业机器人不必处理的社会信号。物理机器人曾只需要考虑物理信号,但在平行机器人中,软件机器人在相当程度上是依靠社会信号来获取其对社会和信息空间的感知,这就是平行知识机器人必须面临的新挑战,也是为什么知识机器人必须利用自然语言处理、机器学习、人工智能和其它智能技术的主要原因。这方面的相关讨论和研究目前刚刚起步,涉及社会、心理、文化等学科,主要是如何完成从“大定律,小数据”的机械式牛顿系统转向“小定律,大数据”的智能化默顿系统。这一过程远比传统的工业机器人的开发要复杂,但意义也更加重要和巨大,必须倍加关注,尽快完成从机械的牛顿机器向智能的默顿机器的升华。

图4 知识机器人:从工业自动化到知识自动化
(注:本图引用了网上开源的机器人图片,特此说明致谢)
5 展望
发展智能机器人系统是产业升级和智能产业的基础,也是时代的要求。首先是智能产业对劳动人口的能力提出了更专、更深、更高,有时甚至是“非分”的要求,一般素质难以达到。其次是新一代“QQ”式的劳动力人口,伴随着智能手机、微博、微信等“碎片化”社会媒体和生活方式成长,已经难以适应上一代传统的学习方式与工作要求,相对而言“传统能力”退化。这“一进一退”,使得需求双方的差距更加扩大,必须靠机器人这类智能机器加以“补偿”。否则,不但产业无法升级,整个社会的竞争和影响力也将退化,这就是中国和其他国家近年来纷纷提出发展机器人和智能制造战略与计划的根本原因。
人才,特别是面向应用的高端人才的培养和有效利用仍是机器人产业发展的瓶颈。此外,必须充分思考机器人产业发展的战略,在提高加强物理形态的工业机器人的基础上,关注并重视刚刚起步但意义非凡的软件和知识机器人,特别是二者融合的平行机器人,吸取中国在计算机产业发展过程中的教训,突破重“硬件”,轻“软件”的传统思维,不要在回头捡“芝麻”之时,却被面前的“西瓜”绊倒,在智能机器人和先进装备制造领域再次失去另一次可能的重大发展机遇。

https://blog.sciencenet.cn/blog-951291-1192873.html
上一篇:[转载]北大教授渠敬东:只想“赢”的教育,会让年轻人过早“夭折”
下一篇:那个14岁上大学、17岁读博、24岁成教授的天才神童,如今怎样了?