博文
高速可穿戴下肢外骨骼机器人
||
中国科学技术大学可穿戴机器人与生机电系统实验室李智军教授及其团队通过研究人体的下肢结构以及行走动态平衡规律,设计了高速动平衡的可穿戴下肢外骨骼机器人。相关成果最新在线发表于Science China Information Sciences,该刊2019年第5期即将出版“Special Focus on Human-Robot Hybrid Intelligence”专题,欢迎关注!

可穿戴下肢外骨骼机器人(Wearable Lower-limb Exoskeleton Robot)是基于仿生学和人体工程学设计的可穿戴式机器人,被广泛用于医疗、军事等各个领域。现有的下肢外骨骼机器人的行走速度比人自然行走的速度慢得多,且大多数外骨骼需要各种辅助支持工具来维持动态平衡。如何在人机强耦合非线性存在的条件下保证系统的快速响应以及防止外骨骼在使用过程中摔倒情况的出现是亟待突破的关键技术。
近年来,随着人工智能、仿生学等跨学科在工程技术领域的快速发展,外骨骼机器人得到了空前的发展。正常人下肢行走能够实时预估质心及零力矩点的变化趋势,形成抗摔倒的自平衡约束,而无需上肢运动参与。因此,研究正常人的下肢结构,从结构优化设计出发,建立包含自平衡的最优控制方法,对提高机器人的行走速度以及动态平衡能力有着重要的借鉴意义。
中国科学技术大学可穿戴机器人与生机电系统实验室李智军教授及其团队通过研究人体的下肢结构以及行走动态平衡规律,设计了高速动平衡的可穿戴下肢外骨骼机器人,它与之前的外骨骼机器人相比,最大特点是不需要任何辅具支撑,并且可以实现快速行走。这种机器人每支腿有6个驱动电机,采取主动控制髋关节内收/外展运动,以实现动态平衡的高速行走;并具有多个腿部长度可调机构,满足个性化要求。实验验证,在没有辅助支撑的情况之下,最快的行走速度可以达到0.8m/s。
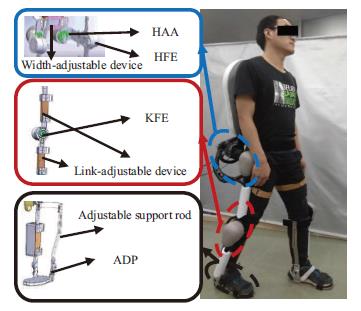
高速动平衡的可穿戴下肢外骨骼机器人展示
点击下方链接免费读全文:
Ren Z, Deng C J,Zhao K K, et al. The development of a high-speed lower-limb robotic exoskeleton. Sci China Inf Sci, 2019, 62(5): 050202
https://doi.org/10.1007/s11432-018-9717-2
PDF免费下载链接:http://scis.scichina.com/en/2019/050202.pdf
《中国科学》杂志社 Science China Press
公众微信号:scichina1950

https://blog.sciencenet.cn/blog-528739-1157615.html
上一篇:生命的奥秘
下一篇:“精准医学”提出10年,我们做了什么?