
||
无人驾驶机器人
随着汽车技术的发展和科技的进步,人们对汽车在环保、节能、安全及驾驶等方面的要求越来越高,汽车的研究设计正在向集成计算机技术、自动化技术及人工智能等技术为一体的智能网联汽车发展,而汽车自动驾驶技术正是智能网联汽车关键技术之一。另外,汽车给人们带来便捷的同时,交通事故和道路拥堵等问题也给社会带来了困扰,如何减少交通事故的发生、提高道路运输效率在当今显得尤为重要。无人驾驶技术给这些问题的解决提供了新思路,而无人驾驶机器人车辆则是无人驾驶车辆中的一种。
无人驾驶机器人是实现车辆自动驾驶的一种新思路。与普通无人驾驶车辆相比,无人驾驶机器人车辆最大的优点在于不需要对车辆结构进行任何改装,无人驾驶机器人就能安装到驾驶室,实现车辆的自动驾驶,并且一台驾驶机器人能适用于多种类型车辆。利用无人驾驶机器人进行车辆试验获得的结果比人类驾驶员获得的结果更为精确、可靠,并可将普通车辆变为自动驾驶车辆。另外,无人驾驶机器人车辆可代替战士和武警官兵驾驶车辆,应用于部队运输、战场救援、疑兵伪装、驾车扫雷等军用领域,以及抗洪抢险、火灾救援、地震救灾、泥石流救援等警用领域。

无人驾驶机器人是一种无需对车辆进行改装,可无损安装在不同车型的驾驶室内,替代驾驶员在危险条件和恶劣环境下进行车辆自动驾驶的智能化机器人。无人驾驶机器人是车辆自动驾驶的一种新思路,通过车辆结构尺寸和性能自学习,驾驶机器人可以不改变现有车辆结构的同时实现自主驾驶,并可以实现同一台机器人适应多种不同类型车辆。由于其无需对车辆进行任何改装,可以直接安装在不同车型的驾驶室内,因此其相关技术可广泛应用于车辆道路试验、车辆台架试验、自主驾驶车辆、无人地面移动武器机动平台等军民两用领域。开展无人驾驶机器人技术的研究,不仅可以加速汽车研发进度、提升我国汽车技术自主研发水平和试验手段,并可为其在汽车环保安全、无人驾驶车辆、无人战车等民用和国防军工领域的应用提供理论基础和技术支撑,具有重要的科学意义和广泛的应用前景。
电磁直驱无人驾驶机器人应用“电-磁-力”转换原理,采用电磁直驱方式将电能直接转换为直线运动与旋转运动所需的机械能,以控制油门机械腿、离合机械腿、制动机械腿、换挡机械手、转向机械手等执行机构完成相应驾驶动作,能同时实现高速、高精度的直线直接驱动和旋转直接驱动,消除了机械机构的迟滞,实现了“零间隙传动”,具有其他驱动方式无可比拟的高效性和节能性。

《电磁直驱无人驾驶机器人动态特性与控制》在课题组DNC-1 全气动驾驶机器人、DNC-2 气电混合驱动驾驶机器人和DNC-3 全伺服电动驾驶机器人以及目前国内外驾驶机器人技术的研究基础上,研究了DNC-4 电磁直驱无人驾驶机器人总体系统设计、电磁直驱无人驾驶机器人动态特性及智能优化、无人驾驶机器人电磁直驱控制及联合仿真、车辆性能自学习及无人驾驶机器人智能换挡控制和多机械手协调控制、无人驾驶机器人车速跟踪智能控制策略、电磁直驱无人驾驶机器人车辆路径及速度解耦控制等若干关键技术和应用基础问题。
无人驾驶机器人协调控制及车辆运动控制
无人驾驶机器人是一种仿生机器人,要实现无人驾驶机器人模拟人准确完成驾驶动作,必须实现无人驾驶机器人多机械手协调控制,建立合理的多机械手协调控制模型是关系到整个无人驾驶机器人系统驾驶行为优劣的关键。
德国乌尔姆大学Sailer 等研究了驾驶机器人操纵汽车的起步控制、制动控制,运用递归最小二乘法设计了一种闭环车速跟踪控制算法。新西兰奥克兰大学Nicholas 等设计了用于自主车辆跟踪的驾驶机器人PID 控制器,但踏板黏滑和油门/制动切换的非线性问题限制了控制器性能。德国乌尔姆大学Sailer 等设计了基于平整度的驾驶机器人车速跟踪控制,但其近似发动机扭矩最大模型不准确,并且在线自适应性差。为了实现复杂驾驶循环工况下无人驾驶机器人多机械手协调控制和精确车速跟踪,《电磁直驱无人驾驶机器人动态特性与控制》提出了一种基于模糊逻辑理论的无人驾驶机器人递阶协调控制方法。在分析驾驶循环行驶工况的基础上,建立了基于Saridis 体系结构的无人驾驶机器人递阶控制模型,研究了融合驾驶员操纵驾驶经验的无人驾驶机器人油门机械腿、制动机械腿、离合机械腿和换挡机械手综合协调运动规律,设计了无人驾驶机器人智能换挡控制器和油门/离合机械腿协调控制器及油门/制动机械腿切换控制器。

电磁直驱无人驾驶机器人是采用电磁直线执行器(直线电机)和无刷直流旋转直驱电机来直接驱动的,但由于直接驱动不存在中间减速机构和传动机构,系统对负载扰动、电动机推力波动和惯量变化较为敏感,直接驱动机器人的控制相对复杂,所以目前对直接驱动机器人的研究主要集中在控制算法上。譬如南昌航空大学贺红林教授等提出了二自由度直接驱动机器人臂杆自适应-PD 复合运动控制,消除了由于机器人难以建立精确模型而带来的参数和非参数不确定性。
Thanok设计了具有动摩擦补偿的自适应控制器,具有良好的非线性补偿特性;Ibrahim等设计了基于遗传算法的一种整体滑模控制器,从而很好地实现了对机器人轨迹的精确跟踪控制。此外美国约翰·霍普金斯大学Brown 等研究了一种微型直接驱动四足行走机器人的运动效率和效果分析;Chavez-Olivares 等研究了拟人化直接驱动机器人的惯性及摩擦系数等参数辨识实验评价方案;日本大阪大学Nakata 等进行了直接驱动肌肉跳跃机器人的刚度椭圆柔顺控制研究;加拿大Hamelin 等提出了基于双观测器的水下直驱打磨机器人离散时间状态反馈速度估计控制器。总而言之,目前对于直接驱动机器人的控制算法研究是热点,无论国内还是国外的研究都有改进空间。
电磁直驱无人驾驶机器人车辆的运动控制主要根据车辆当前状态信息和路径规划环节给出的参考路径对智能车辆的速度和方向进行综合控制,在精度范围内实现智能车辆的跟踪路径,并根据当前反馈信息纠正行驶车辆的速度和方向,最终完成指定驾驶任务。电磁直驱无人驾驶机器人车辆的运动控制包括方向控制和车速控制。在电磁直驱无人驾驶机器人车辆方向控制方面,中国科技大学张卫忠等提出了一种无人地面车辆转向系统的仿人智能运动控制算法,该种控制方法可实现在不同控制模态之间切换,满足车辆转向过程不同行驶阶段的控制要求。南京航空航天大学凌锐提出了一种可行车辆轨迹规划方法,并针对车辆的转向轨迹跟踪问题,根据车辆动力学模型中侧向位置和横摆角度之间的耦合关系提出了一种基于动态面的跟踪控制律。中国人民解放军军事交通学院秦万军等对无人驾驶车辆前后轮胎所受的侧偏力进行了分析,求解出了车辆的运动微分方程,并基于此建立了一个二自由度模型,并通过一个转向的MATLAB/SIMULINK仿真实例验证了该模型的有效性。中国科技大学杨琼琼等提出了一种基于图像的辅助实现机器人驾驶汽车的方法,根据机器人驾驶过程中所拍摄的路面图像的目标位置点计算出车辆行驶时的转弯半径,根据方向盘转角与转弯半径之间的关系得出方向盘的转角。Zhu 等提出了一种基于视觉的支持向量机的车辆方向控制算法,该控制器输入的是车辆位置路线图,输出的是转向盘的转向角。吉林大学陈虹等运用随机模型预测控制方法实现了车辆转向路径跟踪控制,该控制方法可以补偿车辆横向运动的参数不确定性。以上研究均可实现比较精确的路径跟踪控制,但均未考虑车辆纵向车速对车辆横向转向运动的影响,《电磁直驱无人驾驶机器人动态特性与控制》在以上研究的基础上进一步探索车辆纵向运动和无人驾驶机器人车辆横向运动的耦合关系。
关于无人驾驶机器人车辆的车速跟踪控制主要有PID 控制、Smith 预估补偿控制、模糊控制及模糊神经网络控制等,以上控制方法虽然都在一定程度上实现了较为精确的速度跟踪,但未与无人驾驶机器人车辆方向进行综合控制。基于以上问题《电磁直驱无人驾驶机器人动态特性与控制》提出了一种无人驾驶机器人车辆方向及速度跟踪控制的模糊免疫PID 控制方法,并引入速度反馈实现了无人驾驶机器人车辆方向控制与速度控制的解耦,从而实现无人驾驶机器人车辆预期路径跟踪的运动控制。
无人驾驶机器人总体结构
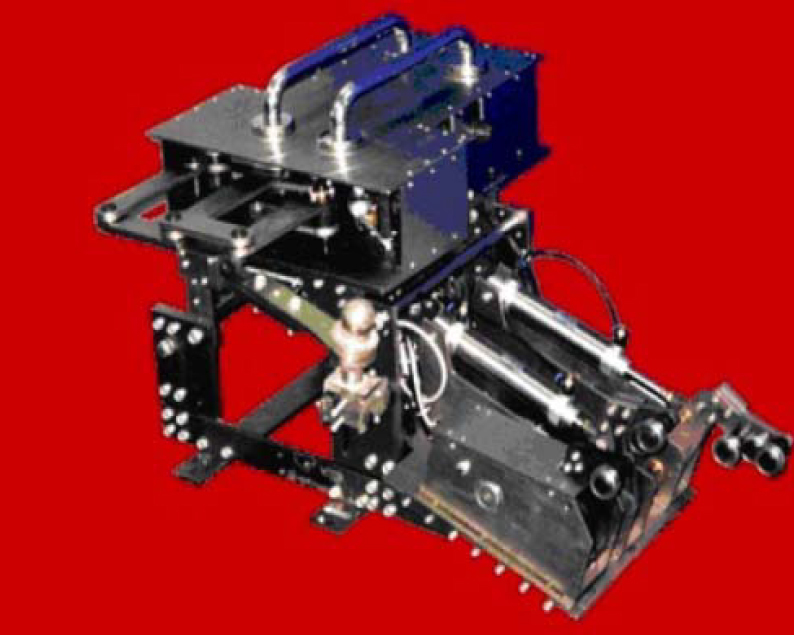
《电磁直驱无人驾驶机器人动态特性与控制》研制的无人驾驶机器人主要由换挡机械手、转向机械手、油门机械腿、离合机械腿、制动机械腿、驱动电机和控制系统等组成。《电磁直驱无人驾驶机器人动态特性与控制》研制的无人驾驶机器人是自动驾驶技术的一种,其与智能车辆相比的益处是可以无损安装在各种车型驾驶室内,不用对原有车辆结构进行改装。电磁直驱无人驾驶机器人的结构如图1 所示。

图1 电磁直驱无人驾驶机器人总体结构
1-转向机械手 2-离合机械腿 3-制动机械腿 4-油门机械腿 5-换挡机械手
无人驾驶机器人控制系统可根据相关车载传感器的反馈信息决策出无人驾驶机器人换挡/转向机械手及油门/离合/制动机械腿的动作要领,从而操纵车辆换挡手柄、方向盘以及离合/制动/油门踏板完成相应的驾驶动作。
作者简介:
陈刚,南京理工大学机械工程学院副教授,硕士研究生导师。东南大学工学博士,南京理工大学机械工程博士后,美国普渡大学机械工程学院国家公派访问学者,美国德克萨斯A&M 大学工程学院博士后,入选江苏省“六大人才高峰”高层次人才计划。
本文摘编自陈刚著《电磁直驱无人驾驶机器人动态特性与控制》,内容有删节。

电磁直驱无人驾驶机器人动态特性与控制
(博士后文库)
陈 刚 著
责任编辑:胡 凯 许 蕾
北京:科学出版社
ISBN:978-7-03-055379-9

长按二维码 购买本书
《电磁直驱无人驾驶机器人动态特性与控制》比较全面系统地介绍了著者十余年来的研究成果。全书共分8 章,内容主要包括电磁直驱无人驾驶机器人总体系统设计、电磁直驱无人驾驶机器人动态特性及智能优化、无人驾驶机器人电磁直驱控制及联合仿真、车辆性能自学习及无人驾驶机器人协调控制、无人驾驶机器人车速跟踪智能控制策略研究、电磁直驱无人驾驶机器人车辆路径及速度解耦控制。
(本期编辑:安 静)

一起阅读科学!
科学出版社│微信ID:sciencepress-cspm
专业品质 学术价值
原创好读 科学品味
更多好素材,期待您的来稿
Archiver|手机版|科学网 ( 京ICP备07017567号-12 )
GMT+8, 2024-4-25 02:10
Powered by ScienceNet.cn
Copyright © 2007- 中国科学报社