博文
无人机集群协同新技术
|||
导读
智能化、集群化是未来无人机技术的发展趋势,而无人机编队技术是实现无人机高级智能行为的必要基础和关键技术。最近开展的一项关于无人机编队控制算法的研究,能够实现对无人机编队间气动干扰进行实时估计与抑制,有效提高无人机集群密集编队的控制精度。
相关研究发表于 SCIENCE CHINA Information Sciences(《中国科学:信息科学》英文版)2017年第7期专题:“Special Focus on Formation Control of Unmanned Systems”,题目为 “Tight formation control of multiple unmanned aerial vehicles through an adaptive control method”,由南京航空航天大学王寅副教授担任通讯作者撰写。
随着无人机自主化和网络化通信技术的发展,无人机的应用模式也在不断地发展。单架无人机受限于探测能力、载荷等因素,难以完成日益复杂的任务。多架无人机间通过通讯进行信息共享,扩大对环境态势的感知,实现协同任务分配与协调,能够有效提高无人机完成复杂任务的能力。所谓多无人机的协同编队飞行, 就是使多架无人机飞行过程中形成所要求的空间拓扑关系,并能根据任务的环境与需求进行动态调整,以体现整个机群的协同一致性,是实现无人机集群协同等高级智能行为的必要基础。
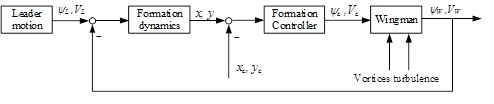
无人机编队控制结构图
该项研究对编队中无人机间的涡流效应进行了分析,并在考虑涡流效应和无人机未知模型参数的前提下为编队设计了自适应控制律,使之能够在扰动模型不确定的情况下达到较好的控制效果。这一研究成果能够提高无人机紧密编队的飞行性能,具有重要的科学意义和应用价值。
研究得到了国家自然科学基金和北京航天航空大学虚拟现实技术与系统国家重点实验室开放基金的支持。
↙点击下方“阅读原文”下载论
Special Focus on Formation Control of Unmanned Systems专题篇目
A survey on recent progress in control of swarm systems
Bing ZHU, Lihua XIE, Duo HAN, Xiangyu MENG & Rodney TEO
Sci China Inf Sci, 2017, 60(7): 070201
Formation control with disturbance rejection for a class of Lipschitz nonlinear systems
Chunyan WANG, Zongyu ZUO, Qinghai GONG & Zhengtao DING
Sci China Inf Sci, 2017, 60(7): 070202
Saturated coordinated control of multiple underactuated unmanned surface vehicles over a closed curve
Lu LIU, Dan WANG, Zhouhua PENG & Hugh H.T. LIU
Sci China Inf Sci, 2017, 60(7): 070203
Fault-tolerant cooperative control for multiple UAVs based on sliding mode techniques
Peng LI, Xiang YU, Xiaoyan PENG, Zhiqiang ZHENG & Youmin ZHANG
Sci China Inf Sci, 2017, 60(7): 070204
Simultaneous attack of a stationary target using multiple missiles: a consensus-based approach
Jialing ZHOU, Jianying YANG & Zhongkui LI
Sci China Inf Sci, 2017, 60(7): 070205
Leader-follower formation of vehicles with velocity constraints and local coordinate frames
Xiao YU & Lu LIU
Sci China Inf Sci, 2017, 60(7): 070206
Tight formation control of multiple unmanned aerial vehicles through an adaptive control method
Yin WANG & Daobo WANG
Sci China Inf Sci, 2017, 60(7): 070207
专题网址如下,欢迎免费下载阅读:
https://blog.sciencenet.cn/blog-528739-1067857.html
上一篇:温暖教育读本丨以爱的名义教书育人
下一篇:飞秒激光,跟咱普通人有什么关系?