博文
运动控制系统(Motion Control System)
|||
注释:本文写于2012年,并在不断更新。由于本人平时学业忙,很少有时间码字,所以内容并非最新。
根据执行器(Actuator)的不同,运动控制系统常见的有:电气的(Electrical)、液压的(Hydraulic)和气动的(Pneumatic)三种。这里,我们将讨论范围限制在电气运动控制系统中。
1.电机控制电子(Motor Control Electronics)
(注释:如对本节有兴趣,您需要了解基本的电子学与微控制器内容,比如:
A. Agarwal的Foundations of Analog and Digital Electronic Circuits
David A. Patterson和John L. Hennessy的Computer Organization and Design)
电机的物理特性(反电动势)决定了它具有天然的内在反馈(Intrinsic Feedback),因此能够通过电压来控制速度,然而在实际应用常常需要位置和力矩控制,因此需通过外部反馈(Extrinsic Feedback)来改善电机的动态特性,因此可以说:电机伺服驱动器的功能就是改善电机的动态特性。根据电路功率的不同,通常将伺服驱动器分为两个部分:电机控制器(Motor Controller)和驱动器(Motor Driver)。控制器的功能是提供位置、速度和力矩控制;驱动器的功能是功率放大。
1.1 电机控制器(Motor Controller)
电机动态特性的改善在经典控制中通常是在前馈通道中引入控制器(Controller),通常是PI控制器,通过将连续的控制器离散化,可以得到差分方程形式的控制器。差分方程可以在数字电路中编程实现,通用的数字电路实现载体是一款微控制器(Micro-Control Unit,MCU)、数字信号处理器(Digital Signal Processor)或者现场可编程门阵列(Field Programmable Gate Array,FPGA)。使用的微控制器需要提供基本的4个功能:1)接收控制系统的参考输入(Reference Input);2)接收反馈(Feedback);3)高速计算(Computation)和4)对象控制(Control)。
1)参考输入的表现形式可以是模拟电压或者数字电压(PWM),也可以使用串行通信,比如RS232,RS485,Ethernet,CAN通信等。给伺服驱动参考输入的为运动控制器。
2)反馈是通过传感器实现的,传感器将物理量转化为电信号(通常是电压信号)。为了进行电机的位置、速度和力矩控制,至少要检测位置、速度和力矩三种物理量,否则就需要设计观测器。现代电机控制中,位置和速度的检测通常使用编码器,并采用捕捉器(Capture Unit)或者专用的正交编码单元采集。为了降低系统成本和复杂性,速度往往通过对位置求差商得到,但是这样求得的速度常常会受到噪声的干扰,需要滤波处理,增加了算法的复杂性。力矩的检测通常是间接的,有效地利用直流电机中力矩与电流成正比的关系可以将力矩检测转化为电流检测。逆变器中添加检流电阻器(Current Sensing Resistor)是一种极其简单的电流检测策略,但是它存在信号小、输出阻抗高、噪声大等劣势。为了改善信号质量,需要添加适当的模拟调理单元(Analog Conditioning Unit),最终才能送给ADC采集。
3)控制器的实现需要高速浮点计算。通常选用的微控制器具有以下特色:高速时钟、多级流水线、硬件乘法器、浮点单元、Harvard架构等。
4)控制对象。对象(Plant)的控制也具有两种形式:模拟电压和数字电压(PWM)。模拟控制中采用DAC驱动功率放大器形式;数字控制中使用PWM发生器经过栅极驱动器驱动功率逆变器。现代电机控制多采用PWM控制器,原因是:其一,数字控制的功率器件自身功耗低,其二,只有高低两种电压,控制简单,成本低。但是劣势也是明显的,这会引入大量的噪声。
1.2 电机驱动器(Motor Driver)
然而,即便拥有了电机控制器,我们的系统仍然不能工作,原因是微处理器的PWM发生器驱动能力(Drive Capability)不足。一个微控制器的驱动能力是指在一定的电平下(高或者低),维持电压变化不大(不应超过阀值电压VOH或者VOL)的情况下,能够提供的电流的大小。电机驱动器将来自控制器的低功率信号放大以驱动电机,因此又称为放大器(Amplifier)。在电子学中,这种功能是通过晶体管实现的。依据功率晶体管的工作区域,驱动方式可以分为模拟驱动(Analog Drive)和数字驱动(Digital Drive),由于数字驱动自身功耗小、对噪声免疫、结构简单,现代驱动器大多数采用数字驱动。现代数字驱动器可以分为两级结构:驱动级(Driver Stage)和功率级(Power Stage)。

图1. 电机的分立式模拟驱动器
(运算放大器的负反馈一方面构成了同相放大,另一方面消除了推拉输出的交越失真)
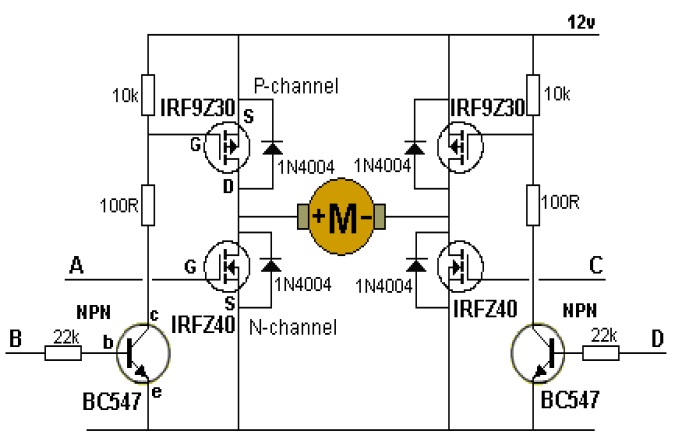
图2. 电机的数字驱动器
(电阻负载形式的反相器用于提高驱动栅极的电压)
1)驱动级(Driver Stage),通常是指栅极驱动器(Gate Driver),它用于将微处理器发出的微弱电信号平移并放大以驱动功率MOSFET或者IGBT的栅极(Gate)。
2)功率级(Power Stage),常常是逆变器(Inverter),用于将栅极驱动器发出的驱动信号转化为直接驱动电机的大功率信号。它将来自电源的能量形式转换为驱动电机所需的能量形式(Form of Energy),具体的结构和电机的原理相关。
3)驱动部分需要一些辅助部件(Ancillary Components),它们是一些为了保证系统可靠、高性能运行而添加的部件,比如:总线电容(Bus Capacitor)用于提供临时电流、稳定总线电压;缓冲器(Snubber)用于防止系统中的电气变量的上冲(Overshoot)与下冲(Undershoot)带来的系统损坏;滤波器(Filter)用于滤除开关电路带来的高次谐波。
1.3 电机(Electric Machine)
电机是将来自驱动器的电气形式的能量转化为机械形式的能量的执行设备。电机可以是直流电机(DC Motor)、交流电机(AC Motor)和步进电机(Stepper Motor)。这里,我们探讨直流电机,我们不涉及电机物理层面,而直接应用线性模型进行分析。对于直流电机,根据控制物理量的不同,可以分为:位置控制、速度控制和力矩控制。针对不同的控制,可以对电机建立不同的模型。这里,我们令输入为电枢电压V,输出为电枢反电动势e,忽略摩擦,则电机的二阶微分方程描述为:
$V=\frac{L}{R}\frac{RJ}{KeKt}\frac{\mathrm{d^{2}e} }{\mathrm{d} t^{2}}+\frac{RJ}{KeKt}\frac{\mathrm{de} }{\mathrm{d} t}+e$
1.4 反馈(Feedback)
反馈(Feedback)用于检测系统实际输出,以便计算误差,执行算法。反馈变量可以是电机输出的机械变量(Mechanical Variables)也可是电机输入的电气变量(Electrical Variables)。电气变量常常是电机相电流,通过专用电流检测IC检测;机械变量常常是位移、速度和加速度,常常使用旋转编码器(Encoder)、分解器(Resolver)、霍尔效应传感器(Hall Effect Sensor)等来检测。传感器转换得到的电气变量(通常是电压)需要经过信号调理才能送入运动控制器,比如:模拟霍尔芯片的电压缓冲、滤波、放大、平移和数字光电编码器的电平转换等。
1.5电源(Power Supply)
电源管理(Power Management)是给整个运动控制系统供电的部分。对于小功率直流电机,电源往往是通过AC-DC变换器(将交流市电转换为大功率直流电,供给电机与运动控制系统使用)、隔离DC-DC变换器(将AC-DC变换器得到的高压变换为低压,并隔离电机带来的噪声)以及多个非隔离DC-DC变换器(为控制系统中大功率器件供电)与线性稳压器(为系统中小功率器件供电)的结合为系统供电。
1.6传动
传动机构(Transmission Mechanism)由于电机转速较高,通常要通过传动装置间接作用在负载上,传动装置的作用是进行机械量的传递与变换,最常见的是减速装置,用于降低速度、提高力和精度。传动机构常见的有行星齿轮、谐波齿轮或者滚珠丝杠。
1.7负载
负载(Load)是任何被移动的物体,负载常见的有机器人的操作臂、轻巧手指或者数控机床。
2.电机控制算法(Motor Control Algorithm)
(注释:如对本节有兴趣,您需要了解基本的控制理论相关内容。比如:
Norman S. Nise的Control System Engineering)
电机控制算法(Motor Control Algorithms)的主要作用是使电机稳定、快速、准确地跟踪(Track)给定输入。比较成熟的就是经典的PID控制。由于数字系统中波动性较大,微分量容易导致系统不稳定,因此PI控制使用最多。这里,我们仅探讨简单的直流电机。直流电机的速度控制动力学可以表达为输入为电枢电压(Armature Voltage)、输出为转子速度(Rotor Speed)的二阶微分方程。它的动态特性完全由两个时间常数决定,即机械时间常数和电气时间常数,它们分别表征速度和电流变化的速率。即便电机存在内在反馈,但是由于其抗负载力矩扰动性能很差,因此需要使用外部反馈改善。常用的解决方案是PI控制器。
未完成...
3.机器人控制(Robot Control)
(注释:如对本节有兴趣,您需要了解基本的机器人学相关内容。比如:
JJ Craig的Introduction to Robotics,比较高级的读物,可以参考:
Rrchard M. Murray的A mathematical introduction to Robotic Manipulation)
未完成...https://blog.sciencenet.cn/blog-450173-535573.html
上一篇:原子论的兴衰(The history of Atomism)