²©ĪÄ
½ŖĄĻŹ¦“ųÄćÉč¼ĘCPUÖ®10
|||
5. ŌŠĶCPUÉč¼Ę
ÕāŅ»²æ·Ö½«½éÉÜCPUµÄÕūĢåÉč¼Ę£¬ÕāÖÖÉč¼ĘĻÖŌŚ±»³ĘĪŖĪ¢ĢåĻµ½į¹¹”£×Ō“ÓÓŠĮĖøßĖŁ»ŗ“ęcacheÖ®ŗó£¬CPUµÄøÅÄīŅŃ¾×Ŗ»Æ³É”°ŗĖ”±£¬¼“Äܹ»ŌĖŠŠ³ĢŠņµÄµ„Ī»”£ĪŖĮĖ¼ņµ„ĻČÉč¼ĘŅ»øöŌŠĶCPU£¬“ę“¢Ę÷ŹĒĢŲÖʵÄÖ»¶Į“ę“¢Ę÷”£
5.1. ŌŠĶCPUµÄ½į¹¹
5.1.1. EROM½«³ĢŠņŌ¤ĻČŅŌijÖÖ¹¤ŅÕ·ÅČėijÖÖ“ę“¢Ę÷£¬Ź¹ÓĆŹ±Ö»ÄܶĮ¶ų²»ÄÜŠ“£¬ÕāÖÖ“ę“¢Ę÷½ŠÖ»¶Į“ę“¢Ę÷£ØROM£©”£Ķ¼5‑1ŹĒÓŠ16øö“ę“¢µ„ŌŖµÄ8Ī»Ö»¶Į“ę“¢Ę÷”£ĆæøöµŲÖ·Ļßadi¾ĶŹĒŅ»øö“ę“¢µ„ŌŖ”£Źż¾ŻĻßdkÓėµŲÖ·ĻßadiÖ®¼äÓĆ“ųæŖ¹ŲµÄ¶ž¼«¹ÜĮ¬½Ó£¬±»Ń”ÖŠµ„ŌŖæŖ¹Ų½ÓĶØ£¬ÄĒŅ»Ī»Źż¾Ż¾ĶŹĒ1£¬²»Č»ŹĒ0”£ÕāøöROMæÉŅŌŹĀĻČŹÖ¶ÆŹäČėŹż¾ŻŗĶ³ĢŠņ£¬Ņņ¶ų½ŠæÉŹäČėÖ»¶Į“ę“¢Ę÷£¬¼ņ¼ĒĪŖEROM”£
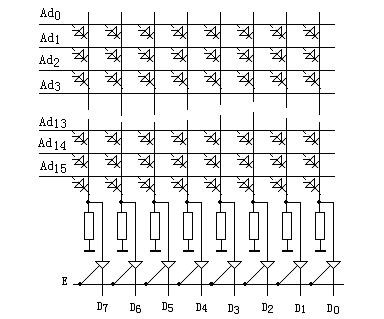
Ķ¼5‑1 æÉŹäČėµÄROM
ŅŌÖ»¶Į“ę“¢Ę÷EROM“śĢęŹäČėÉč±ø£¬ŅŌ·¢¹ā¶ž¼«¹Ü×é“śĢęŹä³öÉč±ø£¬²¢ĒŅÖ»ÄÜ×÷¼Ó”¢¼õ·ØŌĖĖćµÄ¼ĘĖ滜£¬Ó¦øĆŹĒ×ī¼ņµ„µÄCPUĮĖ”£ÕāÖÖ¼ĘĖ滜Źµ¼ŹÉĻŹĒŹ”ĀŌĮĖŹäČėŹä³öÉč±ø£¬Ķ»³öĮĖ¼ĘĖ滜µÄŗĖŠÄ²æ¼ž”£
5.1.2. ÕūĢå½į¹¹Äܹ»×ö¼Ó¼õŌĖĖćCPUµÄÕūĢå½į¹¹ČēĶ¼5‑2ĖłŹ¾”£ĖüŹĒŌŚ¼Ó¼õ·ØŌĖĖćĘ÷µÄ»ł“”ÉĻøÄŌģ¶ųĄ“µÄ£¬±Č¼ĘĖćĘ÷ŅŖø“ŌÓŅ»Š©£¬ĢŲ±šŹĒŌö¼ÓĮĖæŲÖĘĘ÷£¬“Ó¶ųŹ¹Õāøö»śĘ÷µÄ×Ō¶Æ»Æ³Ģ¶Č±Č¼ĘĖćĘ÷ÓŠĮĖ±¾ÖŹµÄĢįÉż”£

Ķ¼5‑2 ¼Ó¼õŌĖĖćCPU½į¹¹
Õāøö¼ĘĖ滜°üĄØæÉŹäČėÖ»¶Į“ę“¢Ę÷EROM”¢µŲÖ·¼Ä“ęĘ÷MAR”¢³ĢŠņ¼ĘŹżĘ÷PC”¢ÖøĮī¼Ä“ęĘ÷IRŗĶæŲÖĘĘ÷CON£¬Ź±ÖÓÖ±½ÓÓÉæŲÖĘĘ÷CONøų³ö”£Õāøö¼ĘĖ滜µÄÄŚ²æ×ÜĻßBusÓÉ8Ģõµ¼Ļß×é³É£¬ÖøĮī¼Ä“ęĘ÷IR”¢Źä³ö¼Ä“ęĘ÷O”¢Źż¾Ż¼Ä“ęĘ÷B”¢AŗĶ¼Ó¼õŌĖĖćĘ÷ADD/SUB¶¼ŹĒ8Ī»µÄ£¬ĖüĆĒ¶¼ŗĶÄŚ²æ×ÜĻßĻąĮ¬£¬Ķعż×ÜĻß½»»»Źż¾Ż£»µŲÖ·¼Ä“ęĘ÷MARŗĶ³ĢŠņ¼ĘŹżĘ÷PC¶¼ŹĒ4Ī»µÄ£¬Ö±½ÓŗĶ×ÜĻߵĵĶ4Ī»ĻąĮ¬”£ÕāѳČ²æ×ÜĻß¼ČæÉŅŌ“«Źä8Ī»µÄŹż¾Ż£¬Ņ²æÉŅŌ“«Źä4Ī»µÄµŲÖ·ŠÅŗÅ”£Źä³ö¼Ä“ęĘ÷OµÄŹä³öÖ±½ÓĮ¬½Ó·¢¹ā¶ž¼«¹Ü×飬Ķعż·¢¹ā¶ž¼«¹Ü×éĻŌŹ¾Źä³ö¼Ä“ęĘ÷OµÄÄŚČŻ”£Ķ¼ÖŠŅŌLæŖĶ·µÄ¶ĢĻߣ¬“ś±ķ¼Ä“ęĘ÷µÄŠ“Źż¾ŻæŲÖʶĖ£¬³ĘĪŖLĆÅ£»ŅŌEæŖĶ·µÄ¶ĢĻß“ś±ķ¼Ä“ęĘ÷µÄŹä³öæŲÖĘČżĢ¬ĆÅ£¬½Š×öEĆÅ”£
5.1.3. Āß¼×é³É¼Ó¼õŌĖĖćCPUµÄĀß¼×é³ÉµÄĪå²æ·Ö£¬·Ö±šŹĒ
(1) ŌĖĖćĘ÷”£Ėü°üĄØADD/SUB”¢A”¢B”£
(2) “ę“¢Ę÷”£Ėü°üĄØ MARŗĶEROM”£
(3) æŲÖĘĘ÷”£Ėü°üĄØ PC”¢IR”¢CON”£
(4) ŹäČė×°ÖĆEROMµÄæŖ¹Ų×锣
(5) Źä³ö¼Ä“ęĘ÷OŗĶ·¢¹ā¶ž¼«¹Ü”£
ŌĖĖćĘ÷ŗĶæŲÖĘĘ÷¹żČ„Ņ»°ćĶ³³ĘĪŖCPU£¬ĻÖŌŚµÄCPU»¹°üĄØcache£Ø¾²Ģ¬“ę“¢Ę÷£©”£
5.1.4. Éč±ø¹¦ÄÜÕāøöŌŠĶCPU±Č¼Ó¼õ·Ø¼ĘĖćĘ÷Ōö¼ÓĮĖĄŪ¼ÓĘ÷”¢æÉŹäČėÖ»¶Į“ę“¢Ę÷”¢³ĢŠņ¼ĘŹżĘ÷”¢ÖøĮī¼Ä“ęĘ÷ŗĶæŲÖĘĘ÷”£
ĄŪ¼ÓĘ÷¼Ä“ęĘ÷A²»µ«æÉŅŌ“ę·ÅŌĖĖćĘ÷ŌĖĖćĒ°µÄŹż¾Ż£¬¶ųĒŅÓĆĄ““ę·ÅĆæ“ĪŌĖĖćµÄ½į¹ū£¬ŌŚ¶ą“ĪĮ¬ŠųµÄ¼Ó·ØŌĖĖćÖŠ£¬¼Ä“ęĘ÷AĘšµ½ĮĖĄŪ¼ÓµÄ×÷ÓĆ£¬Ņņ¶ų°ŃA½ŠĄŪ¼ÓĘ÷”£ĖüÓŠLĆÅ”¢EĆÅæŲÖĘŹż¾ŻµÄŹäČėŹä³ö£¬ÄÜÓė×ÜĻßÖ±½Ó½ųŠŠŹż¾Ż½»»»”£ĖüµÄĮķŅ»øöŹä³ö¶ĖÓėADD/SUBµÄŹäČė¶ĖŹż¾ŻĻßÖ±½ÓĻąĮ¬£¬ÕāøöŹäĖĶƻӊEĆŵÄæŲÖĘ”£
¼Ä“ęĘ÷BŹĒÓė¼Ä“ęĘ÷A ÅäŗĻŹ¹ÓƵĻŗ³å¼Ä“ęĘ÷£¬ĖüµÄŹä³ö¶ĖÖ±½ÓÓėADD/SUBµÄĮķŅ»øöŹäČė¶ĖĻąĮ¬£¬¹ŹæÉŅŌ°Ń“Ó×ÜĻß½ÓŹÕµÄŹż¾ŻÖ±½ÓĖĶµ½ADD/SUBµÄĮķŅ»øöŹäČė¶Ė”£¼Ä“ęĘ÷BÖ»ŹĒ“Ó×ÜĻßÉĻ½ÓŹÕŹż¾Ż£¬¶ų²»ŠčŅŖ½«ÄŚČŻÖ±½ÓĖĶµ½×ÜĻߣ¬¹Ź²»ÓĆEĆÅæŲÖĘ”£
æÉŹäČėÖ»¶Į“ę“¢Ę÷æÉŹĀĻČŹäČėŹż¾ŻµÄŹäČėÖ»¶Į“ę“¢Ę÷EROM£¬¼Č³äµ±“ę“¢Ę÷£¬Ņ²³äµ±ŹäČė×°ÖĆ”£EROM¹²ÓŠ16øö“ę“¢µ„ŌŖ£¬Ē°¶ĖÓŠµŲÖ·ŅėĀėĘ÷£¬Ķعż4Ī»µÄ“ę·Å“ę“¢µ„ŌŖµŲÖ·µÄ¼Ä“ęĘ÷MAR£¬Č·¶ØÕżŌŚŹ¹ÓĆµÄ“ę“¢µ„ŌŖ£¬²¢ĒŅEROMµÄEĆÅÄÜæŲÖĘ“ę“¢µ„ŌŖµÄŹż¾ŻĻņ×ÜĻߏä³ö”£
µŲÖ·¼Ä“ęĘ÷MARĶعżLĆÅ“ÓÄŚ²æ×ÜĻßBus½ÓŹÕµŲÖ·Źż¾Ż£¬²¢½«µŲÖ·Źż¾ŻÖ±½ÓĖĶµ½EROMµÄµŲÖ·ŅėĀėĘ÷£¬“Ó¶ųє֊ŠčŅŖµÄ“ę“¢µ„ŌŖ”£
³ĢŠņ¼ĘŹżĘ÷³ĢŠņ¼ĘŹżĘ÷PCµÄ³õŹ¼ÖµŹĒ0£¬ĖüµÄ¼Ó1¹¦ÄÜ£¬æÉŅŌŹ¹ĖüĮ¬ŠųµŲÖøĻņĆæŅ»øö“ę“¢µ„ŌŖ”£¼ŁČēČōøÉøöÖøĮīŹĒ“Ó0ŗÅ“ę“¢µ„ŌŖæŖŹ¼“ę·ÅµÄ£¬ÄĒĆ“æŖŹ¼Ź±½«PCµÄÖµĖĶµ½MAR£¬¾ĶæÉŅŌє֊µŚŅ»ĢõÖøĮī£¬ŌŚÖ“ŠŠÖøĮīµÄ¹ż³ĢÖŠŹ¹PC¼Ó1£¬ÄĒĆ“ŌŚÖ“ŠŠĶźŅ»ĢõÖøĮīÖ®ŗ󣬾ĶÓÖ»į½«ĻĀŅ»ĢõÖøĮīÖ“ŠŠ£¬ÕāŃł¼ĘĖ滜¾Ķ»į²»¶ĻµŲ×Ō¶ÆµŲŌĖŠŠĻĀČ„”£
ÖøĮī¼Ä“ęĘ÷æÉæŲ»ŗ³å¼Ä“ęĘ÷IRŹĒ×ØĆÅ·ÅÖĆÖøĮīµÄ£¬Ņņ¶ų±»³ĘĪŖÖøĮī¼Ä“ęĘ÷”£ŌŚÖøĮī·Åµ½IRÖŠµÄŹ±ŗņ£¬ÓŠÖøĮīŅėĀėĘ÷·ŅėÖøĮī±ąĀė£¬ÕāŃł¾ĶÄܹ»ÖŖµĄÕāŹ±Ö“ŠŠµÄŹĒŹ²Ć“ÖøĮī£¬ŅŌ¼°Źż¾Ż·ÅŌŚÄÄĄļµČ”£ÖøĮī¼Ä“ęĘ÷IR“Ó×ÜĻß½ÓŹÕÖøĮīŹż¾Ż£¬Äܹ»½«ÖøĮīŹż¾ŻµÄøß4Ī»ŗĶµĶ4Ī»·ÖæŖ”£Čē¹ūĖüµÄøß4Ī»·ÅÖĆÖøĮī±ąĀė£¬µĶ4Ī»·ÅÖĆŹż¾ŻµÄµŲÖ·£¬ÄĒĆ“øß4Ī»Ö±½ÓĖĶµ½æŲÖĘĘ÷µÄÖøĮīŅėĀėĘ÷£¬µĶ4Ī»æÉŅŌŌŁĶعżÄŚ²æ×ÜĻßĖĶµ½MAR»ņPC”£
æŲÖĘĘ÷æŲÖĘĘ÷CONŹĒ·¢³öæŲÖĘŠÅŗŵĵŲ·½£¬ĖüÓŠ12ĢõŹä³öĻߣ¬·Ö±šĮ¬½ÓŌŚø÷øöÉč±øµÄæŲÖĘĻßÉĻ£¬ĖüĶ¬Ź±·¢³öClrŗĶClkæŲÖĘŠÅŗÅ£¬ĘäÖŠ»¹°üĄØµēŌ“æŖ¹ŲµČ£¬ĘäĻźĻø½į¹¹ĻĀĆę½«×ØĆÅĢÖĀŪ”£
5.1.5. ¼ĘĖ滜æŲÖĘ×ÖĶźÕū¼ĘĖ滜µÄ»ł±¾¶Æ×÷ŹĒÓÉĖüµÄĖłÓŠæŲÖĘĻßµÄÖµĄ“¾ö¶ØµÄ£¬¼ĘĖ滜ĖłÓŠæŲÖĘĻßÅÅĮŠĖł³ÉµÄ×Ö£¬ŌŚ¼ĘĖ滜דĢ¬±ä»Æ֊ʚמö¶ØŠŌµÄ×÷ÓĆ£¬Ņ²¾ĶŹĒĖµ¼ĘĖ滜µÄŅ»ĒŠ¶Æ×÷·¢Éś¶¼ÓÉÕāøöÅÅĮŠ×ÖÖø»Ó”£
¶ØŅå5‑1 ³żĮĖClrŗĶClkÖ®ĶāµÄČ«²ææŲÖĘĻßÅÅĮŠĖł³ÉµÄŅ»øö×Ö£¬½Š¼ĘĖ滜æŲÖĘ×Ö”£
Õāøö¼Ó¼õŌĖĖćCPUµÄ¼ĘĖ滜æŲÖĘ×ÖŹĒ£ŗ
CpEpLmErLiEiLaEaSuEuLbLo
Õāøö¼ĘĖ滜æŲÖĘ×ÖÓŠ12Ļߣ¬ĆæŅ»ĢõĻßµÄȔֵ²»ŹĒ0¾ĶŹĒ1£¬ĖłŅŌĆæĢõĻßÓÖŹĒŅ»øöĀß¼±äĮ棬ÕāŠ©±äĮæµÄÖµŹĒŅ»øö12Ī»µÄ¶ž½ųÖĘŹż£¬ĖüµÄÓŠŠņ±ä»Æ£¬¾Ķ¾ö¶Ø×ÅÕāøö¼ĘĖ滜µÄČ«²æŌĖ¶Æ”£
ĄżČē£¬CpEpLmErLiEiLaEaSuEuLbLo=100000000000£¬µ±ClkÓÉ0±äµ½1µÄĖ²¼ä£¬¼ĘĖ滜PCµÄÖµ»į¼Ó1£¬¶ųCpEpLmErLiEiLaEaSuEuLbLo=011000000000£¬µ±ClkÓÉ0±äµ½1µÄĖ²¼ä£¬³ĢŠņ¼ĘŹżĘ÷µÄÖµ»įĶعż×ÜĻß“«Źäµ½µŲÖ·¼Ä“ęĘ÷£¬ĶعżMARÖ±½ÓŹäĖĶµ½Į¬½ÓµÄµŲÖ·ŅėĀėĘ÷£¬Ń”ÖŠÖ»¶Į“ę“¢Ę÷EROMÖŠÓÉPCÖøŹ¾µÄ“ę“¢µ„ŌŖ”£
5.2. ¼ĘĖ滜¹¦ÄÜÉč¼Ę5.2.1. æÉŹµĻÖ¹¦ÄÜ·ÖĪö¼ĘĖ滜Äܹ»øÉŹ²Ć“ŹĀĒ飬ŹµĻÖŌõŃłµÄ¹¦ÄÜ£¬ÕāŗĶ¼ĘĖ滜µÄ½į¹¹Ö±½ÓĻą¹Ų”£Ķ¼5‑2µÄ×ÜĻß½į¹¹Äܹ»½ųŠŠŹż¾Ż“«ĖĶ£¬ĖłŅŌæÉŅŌČĆEROM“ę“¢µÄŹż¾ŻĖĶµ½ĄŪ¼ÓĘ÷A£¬ŅŌ±ć“ÓA·Ö·¢µ½ø÷“¦£¬±ČČē½«Źż¾Ż“ÓAĖĶµ½Źä³ö¼Ä“ęĘ÷OĻŌŹ¾Źä³ö”£µ±Č»Ņ²æÉŅŌŃ”ŌńČĆEROM“ę“¢µÄŹż¾ŻÖ±½ÓĖĶµ½Źä³ö¼Ä“ęĘ÷OĻŌŹ¾Źä³ö£¬»ņÕßČĆEROM“ę“¢µÄŹż¾ŻÖ±½ÓĖĶµ½¼Ä“ęĘ÷B»ņ¼Ä“ęĘ÷IRµČ”£
ÓÉÓŚÓŠ¼Ó¼õ·ØŌĖĖćĘ÷£¬×ŌČ»Õāøö¼ĘĖ滜¾ß±ø¼Ó¼õ·ØŌĖĖćµÄ¹¦ÄÜ”£ŅŖŹµĻÖEROMµÄŹż¾ŻÄܽųŠŠ¼Ó·Ø»ņ¼õ·ØŌĖĖć£¬±ŲŠėĻÖ½«EROMµÄŹż¾ŻĖĶµ½¼Ä“ęĘ÷AŗĶBÖŠ£¬ÕāÖÖÄÜĮ¦Õāøö¼ĘĖ滜ŹĒĶźČ«¾ß±øµÄ”£
ÓÉÓŚ¼Ä“ęĘ÷O”¢B”¢MAR¶¼Ć»ÓŠŹä³öæŲÖʵÄEĆÅ£¬Ņņ¶ųŅ²¾Ķ¶¼Ć»ÓŠĻņ×ÜĻߏä³öŹż¾ŻµÄ¹¦ÄÜ£¬²»Äܹ»½«ĖüĆĒ½ÓŹÕµÄŹż¾ŻŌŁ·Ö·¢µ½×ÜĻßÉĻµÄĘäĖūÉč±ø”£Ļą·“£¬PCŗĶEROMƻӊ“Ó×ÜĻßÉĻ½ÓŹÕŹż¾ŻµÄLĆÅæŲÖĘĻߣ¬ĖłŅŌĖüĆĒƻӊ“Ó×ÜĻß½ÓŹÕŹż¾ŻµÄ¹¦ÄÜ”£
ÖøĮī¼Ä“ęĘ÷IRÓŠŹäČėŹä³öæŲÖĘĻߣ¬ĖłŅŌæÉŅŌ“Ó×ÜĻß½ÓŹÕŹż¾Ż£¬Ņ²æÉŅŌ½«Źż¾ŻĖĶµ½×ÜĻß”£ĖüµÄøß4Ī»Ö±½ÓĖĶµ½ĮĖæŲÖĘĘ÷CON£¬ÕāŃł·ÅŌŚĘäÖŠµÄŹż¾Ż£¬¾ĶÄܹ»½«øß4Ī»ŗĶµĶ4Ī»·ÖæŖ£¬²¢ĒŅĶعż×ÜĻßæÉŅŌ½«µĶ4Ī»Źż¾ŻĖĶµ½MAR»ņPC”£ĖäČ»IRŹä³öµÄŹż¾ŻŹĒ8Ī»µÄ£¬µ«MAR»ņPCÖ»ĶعżĮ¬Ļß½ÓŹÕ4Ī»£¬²»ÖĮÓŚ³öĻÖ»ģĀŅ”£IRµÄÖµæÉŅŌ“«Źäµ½¼Ä“ęĘ÷A”¢B”¢O”£
µŲÖ·¼Ä“ęĘ÷MARÄܹ»“Ó×ÜĻß½ÓŹÕPC”¢A”¢IR”¢EROMĖĶµ½×ÜĻßÉĻµÄµĶ4Ī»Źż¾Ż£¬²¢½«Õā4Ī»Źż¾Ż×öĪŖµŲÖ·ŠÅŗÅ£¬ĖĶµ½EROMµÄµŲÖ·ŅėĀėĘ÷£¬Ń”ÖŠ“ę“¢µ„ŌŖ”£
³ĢŠņ¼ĘŹżĘ÷PCæÉŅŌĶعżæŲÖĘĻßCpŹµĻÖ¼Ó1µÄ¹¦ÄÜ£¬³õŹ¼»ÆæŲÖĘĻßClr»įŹ¹ĖüµÄ³õŹ¼ÖµĪŖ0”£
ClkŹ±ÖÓĻßĮ¬½ÓŌŚĆæøöÉč±øµÄŹ±±źĻßÉĻ£¬æÉŅŌæŲÖĘÕūøöĻµĶ³°“×ÅŹ±¼äŅŖĒó¹¤×÷”£
5.2.2. ÖøĮīĻµĶ³Éč¼Ę¼ĘĖ滜½į¹¹Äܹ»Ģį¹©µÄ¹¦Äܲ¢²»ŹĒĪŅĆĒ¶¼ŠčŅŖµÄ£¬øł¾ŻŹµ¼ŹŠčŅŖæÉŅŌ½«Ņ»Š©¹¦ÄÜ×éÖƵ½Ņ»Ęš£¬ŠĪ³É¶ŌĪŅĆĒÓŠÓĆµÄ¹¤×÷Ä£Ź½”£Õā¾ĶŹĒ¼ĘĖ滜µÄÖøĮīÉč¼ĘĪŹĢā”£
ÖøĮīÖ“ŠŠ¹ż³ĢÖøĮīŗĶŹż¾Ż¶¼ŅŖ“ę·ÅŌŚ¼ĘĖ滜µÄ“ę“¢Ę÷ÖŠ£¬Ö“ŠŠÖøĮīµÄŅ»°ć¹ż³Ģ£ŗ
£Ø1£© ½«³ĢŠņ¼ĘŹżĘ÷µÄÄŚČŻĖĶµ½µŲÖ·¼Ä“ęĘ÷£¬Ń”ÖŠÖøĮī“ę“¢µ„ŌŖ£»
£Ø2£© ½«“ę“¢Ę÷є֊µ„ŌŖµÄÄŚČŻĖĶµ½ÖøĮī¼Ä“ęĘ÷½ųŠŠŅėĀėŗĶ·ÖĪö£»
£Ø3£© ½«³ĢŠņ¼ĘŹżĘ÷¼Ó1£¬×¼±øČ”ĻĀŅ»ĢõÖøĮī£»
£Ø4£© øł¾ŻŅė³öµÄÖøĮīĻßŗĶ½ŚÅÄĻߵıä»Æ£¬Ķź³ÉøĆÖøĮīµÄÄ£Ź½¶Æ×÷”£
ÕāĘäÖŠ£Ø2£©µÄŹµĻÖŌŚÕāøöŌŠĶCPUÖŠŹĒIRµÄøß4Ī»ŗĶµĶ4Ī»µÄæÉ·ÖŠŌ”£Čē¹ū½«ÖøĮīŠ“³É”°ÖøĮī±ąĀėŹż¾ŻµŲÖ·”±µÄŠĪŹ½£¬ÄĒĆ“¾ĶæÉŅŌÓĆ4Ī»µÄ¶ž½ųÖʱąĀė±ķŹ¾ÖøĮī£¬Ķ¬Ź±ÓĆ4Ī»µÄ¶ž½ųÖĘŹżÖø³ö“ę“¢µ„ŌŖµÄµŲÖ·”£ĄżČē£¬”°½«Ä³“ę“¢µ„ŌŖµÄÄŚČŻĖĶµ½ĄŪ¼ÓĘ÷A”±ÕāøöÖøĮīÓƶž½ųÖĘŹż0000Ą“±ķŹ¾£¬ÄĒĆ“¾ßĢåµÄµŲÖ·¾ĶæÉŅŌŠ“ŌŚÕāøö±ąĀėµÄŗóĆę”£ÕāŃł½«”°½«5ŗÅ“ę“¢µ„ŌŖµÄÄŚČŻĖĶµ½ĄŪ¼ÓĘ÷A”±£¬¾ĶæÉŅŌŠ“³É0000 0101”£
Óƶž½ųÖĘŹż±ķŹ¾µÄÖøĮī±ąĀė£¬Ņ»°ć½Š²Ł×÷Āė£¬²Ł×÷ĀėŗóĆꊓ³öµÄ¶ž½ųÖĘŹż½Š²Ł×÷Źż”£ÕāÖÖĻČŠ“²Ł×÷Āėŗ󊓲Ł×÷ŹżµÄŠĪŹ½¾Ķ½Š×öÖøĮīøńŹ½”£·ė.ŵŅĄĀü¼ĘĖ滜֊ÖøĮīøńŹ½ŹĒŹµĻÖ³ĢŠņÖ“ŠŠµÄÖŲŅŖŅ»»·£¬ÕżŹĒÓÉÓŚÖøĮīĮ½²æ·ÖµÄŗĻŠ“ŗĶ²š·Ö£¬ŠĪ³ÉĮĖ¼ĘĖ滜µÄø÷ÖÖ»ł±¾¶Æ×÷£¬“Ó¶ųŹ¹ÖøĮī¹¦ÄܵďµĻÖ£¬ÄÜĶعżŅ»Į¬“®±ä»ÆµÄ»ł±¾¶Æ×÷Ķź³É”£
ÖøĮīÉč¼ĘŅĄ¾Ż¼ĘĖ滜µÄÓ²¼ž¹¹³É£Ø²»°üĄØæŲÖĘĘ÷£©£¬Ą“Č·¶Ø¼ĘĖ滜ÄÜĶź³ÉµÄ»ł±¾ČĪĪń£¬ĢåĻÖŌŚ¼ĘĖ滜ÖøĮīÉč¼ĘµÄ¹ż³Ģµ±ÖŠ”£
¶ØŅå5‑2 Ņ»ĢؼĘĖ滜ĖłÄܹ»Ź¶±šµÄČ«²æÖøĮī½ŠÕāĢØ»śĘ÷µÄÖøĮīĻµĶ³»ņÖøĮī¼Æ”£
Ņ»ĢؼĘĖ滜µÄÖøĮīĻµĶ³Éč¼Ę£¬¼ČŗĶ¼ĘĖ滜µÄÓ²¼ž¹¹³ÉÓŠÖ±½Ó¹ŲĻµ£¬Ņ²ŗĶÉč¼ĘÕßŅŖĒó¼°¼ĘĖ滜ÄÜĶź³ÉÄĒŠ©»ł±¾ČĪĪńÓŠ¹Ų”£Ņņ¶ų»į³öĻÖ¼“Ź¹ŹĒĻąĶ¬µÄ¼ĘĖ滜½į¹¹Ņ²»įÓŠ²»Ķ¬µÄÖøĮīĻµĶ³µÄĻÖĻ󔣼ĘĖ滜µÄÖøĮīÉč¼ĘŹĒŗÜӊѧĪŹµÄ£¬Ņ»°ćµŲÓ¦½«ÄĒŠ©×ī»ł±¾µÄČĪĪńÉč¼Ę³ÉÖøĮī£¬Ņ²¾ĶŹĒĖµĶعżÕāŠ©»ł±¾ČĪĪńµÄÖøĮī×éŗĻ£¬æÉŅŌĶź³Éøü¼Óø“ŌÓµÄČĪĪń”£
øł¾ŻŠčŅŖ£¬¼Ó¼õŌĖĖćCPUµÄÖøĮīĻµĶ³Éč¼Ę£¬¾ßĢåČē±ķ5‑1ĖłŹ¾”£ÓÉÓŚ¼ĘĖ滜Äܹ»Ķź³ÉµÄ»ł±¾ČĪĪń£¬»įŠĪ³É¼ĘĖ滜µÄŅ»ÖÖŌĖŠŠÄ£Ź½£¬³ÉĪŖŅ»ÖÖ¹¦ÄÜ£¬ĖłŅŌ±ķÖŠ²»±ź×¢»ł±¾ČĪĪń£¬¶ųŹĒ±ź×¢¹¦ÄÜ”£±ķ5‑1µÄÖś¼Ē·ūŅ»ĄøĢåĻÖĮĖÖøĮīµÄøńŹ½£¬ĘäÖŠOUT”¢STPƻӊ²Ł×÷Źż²æ·Ö£¬æÉŅŌČĻĪŖŹĒ²Ł×÷ŹżŅžŗ¬µÄŅ»ÖÖĢŲŹāĒéæö”£
±ķ5‑1 ÖøĮīĻµĶ³Éč¼Ę
¹¦ ÄÜ | Öś¼Ē·ū | ²Ł×÷Āė |
°Ńij“ę“¢µ„ŌŖRµÄÄŚČŻĖĶµ½ĄŪ¼ÓĘ÷A | LDA R | 0001 |
°Ńij“ę“¢µ„ŌŖRµÄÄŚČŻÓėĄŪ¼ÓĘ÷AµÄÄŚČŻĻą¼Ó½į¹ūĖĶA | ADD R | 0010 |
ÓĆĄŪ¼ÓĘ÷AµÄÄŚČŻ¼õČ„Ä³“ę“¢µ„ŌŖRµÄÄŚČŻ½į¹ūĖĶA | SUB R | 0011 |
½«ĄŪ¼ÓĘ÷AµÄÄŚČŻĖĶµ½Źä³ö¼Ä“ęĘ÷OŹä³ö | OUT | 1000 |
Ķ£»ś | STP | 1111 |
ÖøĮī¹¦ÄܵÄÉč¼ĘÖŠ£¬Ź×ĻČæ¼ĀĒČēŗĪŹµĻÖ¼Ó·Ø»ņ¼õ·ØµÄŌĖĖć”£ŅņĪŖŹż¾ŻŹĒ·ÅŌŚEROMÖŠµÄ£¬Ņņ“ĖŅŖĻČ½«Ņ»øöŹżĖĶµ½ĄŪ¼ÓĘ÷A£¬Č»ŗóŌŁ½«ĮķŅ»øöŹżĖĶµ½¼Ä“ęĘ÷BÓėAÖŠµÄŹżĻą¼Ó£¬ÕāŃł¾ĶÉč¼ĘĮĖÖøĮīLDA RŗĶADD R£¬×ŌČ»SUB RŅ²ŹĒÕāŃłæ¼ĀĒ³öĄ“µÄ”£ŌĖĖćµÄ½į¹ūæÉŅŌÖ±½ÓĖĶµ½¼Ä“ęĘ÷OŹä³ö£¬µ«Čē¹ūŹĒĮ¬Šų¼ĘĖć£¬AŅŖ·ÅÖŠ¼ä½į¹ū£¬¹Ź¶ųČĆĄŪ¼ÓĘ÷AµÄÄŚČŻŹä³öøü¼Ó·½±ć”£
Öś¼Ē·ū±ķŹöµÄÖøĮīŅ²ŹĒŹĒÓÉĮ½²æ·Ö×é³ÉµÄ£¬Ē°ĆęŹĒ±ķŹ¾¹¦ÄܵÄÖøĮīĀė£¬ÖøĮīĀėŗóĆęµÄ²æ·ÖŹĒÖøĮīµÄøØÖśĖµĆ÷£¬øØÖśĖµĆ÷æÉŅŌÓŠ¶ąĻī£¬ÕāĄļµÄøØÖśĖµĆ÷Ö»ÓŠŅ»ĻīR£¬Ėü±ķŹ¾“ę“¢Ę÷µÄµŲÖ·”£ÖøĮīĀėŗĶÖøĮīøØÖśĖµĆ÷×é³ÉµÄÖøĮīŠĪŹ½¾ĶŹĒÖøĮīøńŹ½”£ÖøĮīøńŹ½µÄø“ŌÓ¶Č£¬Č”¾öÓŚÖøĮīøØÖśĖµĆ÷µÄĻīÄæ¶ąÉŁ£¬Ņ»°ćµŲĖµ£¬ĻīÄæŌ½¶ą£¬ÖøĮīµÄŌ½ø“ŌÓ”£ÓĆÖś¼Ē·ū±ķŹ¾µÄÖøĮīŗĶ¼ĘĖ滜Źµ¼ŹÉč¼ĘµÄÖøĮīŹĒŅ»Ņ»¶ŌÓ¦µÄ£¬ÖøĮīÖś¼Ē·ūŌŚ³ĢŠņÉč¼ĘÖŠ³ĘĪŖ»ć±ąÖøĮī”£
»ć±ąÖøĮī×é³ÉµÄĮ½²æ·Ö£¬Ņ²·Ö±š½Š²Ł×÷ĀėŗĶ²Ł×÷Źż”£¼ĘĖ滜µÄÖøĮīæÉŅŌ“ų²Ł×÷Źż£¬Ņ²æÉŅŌ²»“ų²Ł×÷Źż£¬µ«²»ÄÜĆ»ÓĆ²Ł×÷Āė”£ŌŚ½ųŠŠÖøĮī“¦ĄķŹ±£¬×ÜŹĒŅŖ½«²Ł×÷ĀėŗĶ²Ł×÷Źż·ÖæŖ£¬ÓɲŁ×÷ĀėĄ“Č·¶ØÖøĮīµÄŅ»°ć¹¦ÄÜ£¬ÓɲŁ×÷ŹżĄ“Öø³ö¾ßĢåµÄŹµŹ©ÄŚČŻ”£
ÖøĮīČ«³Ģ·ÖĪö½«¶ąĢõÖøĮī“ÓEROMµÄ0ŗŵ„ŌŖĖ³Šņ“ę·Å£¬ÓĆ³ĢŠņ¼ĘŹżĘ÷PCĄ“ÖøŹ¾½«ŅŖÖ“ŠŠµÄÄĒĢõÖøĮī£¬²¢ŌŚÖ“ŠŠÖøĮīµÄ¹ż³ĢÖŠČĆPC¼Ó1£¬ÕāŃł¾ĶÄÜÖŲø“µŲĶعżPCµÄÖøŹ¾Ö“ŠŠČ«²æµÄÖøĮī£¬ÕāŅ»¹ż³ĢŹĒ¼ĘĖ滜×Ō¶ÆÖ“ŠŠ³ĢŠņµÄŅŖµć”£øł¾Ż±¾¼ĘĖ滜µÄ½į¹¹µÄĢŲµć£¬ĻÖŌŚĄ“·ÖĪöĆæĢõÖøĮīµÄÖ“ŠŠ¹ż³Ģ”£ÖøĮīµÄÖ“ŠŠµÄÕūøö¹ż³Ģ½ŠÖøĮīČ«³Ģ”£
LDAµÄÖøĮīČ«³ĢLDAÖøĮīµÄÖ“ŠŠ¹ż³ĢČēĻĀ£ŗ
£Ø1£©½«³ĢŠņ¼ĘŹżĘ÷PCµÄÖµĖĶµ½µŲÖ·¼Ä“ęĘ÷MAR£»
£Ø2£©½«EROMŹä³öµÄÄŚČŻĖĶµ½ÖøĮī¼Ä“ęĘ÷IR£»
£Ø3£©PC ¼Ó1£»
£Ø4£©IRµÄµĶ4Ī»ĖĶµ½MAR£»
£Ø5£©EROMŹä³öµÄÄŚČŻĖĶµ½ĄŪ¼ÓĘ÷A”£
ADDµÄÖøĮīČ«³Ģ£Ø1£©½«³ĢŠņ¼ĘŹżĘ÷PCµÄÖµĖĶµ½µŲÖ·¼Ä“ęĘ÷MAR£»
£Ø2£©½«EROMŹä³öµÄÄŚČŻĖĶµ½ÖøĮī¼Ä“ęĘ÷IR£»
£Ø3£©PC ¼Ó1£»
£Ø4£©IRµÄµĶ4Ī»ĖĶµ½MAR£»
£Ø5£©EROMŹä³öµÄÄŚČŻĖĶµ½Źż¾Ż¼Ä“ęĘ÷B£»
£Ø6£©A£«BµÄ½į¹ūĖĶµ½ĄŪ¼ÓĘ÷A”£
SUBµÄÖøĮīČ«³Ģ£Ø1£©½«³ĢŠņ¼ĘŹżĘ÷PCµÄÖµĖĶµ½µŲÖ·¼Ä“ęĘ÷MAR£»
£Ø2£©½«EROMŹä³öµÄÄŚČŻĖĶµ½ÖøĮī¼Ä“ęĘ÷IR£»
£Ø3£©PC ¼Ó1£»
£Ø4£©IRµÄµĶ4Ī»ĖĶµ½MAR£»
£Ø5£©EROMŹä³öµÄÄŚČŻĖĶµ½Źż¾Ż¼Ä“ęĘ÷B£»
£Ø6£©A-BµÄ½į¹ūĖĶµ½ĄŪ¼ÓĘ÷A”£
OUTµÄÖøĮīČ«³Ģ£Ø1£©½«³ĢŠņ¼ĘŹżĘ÷PCµÄÖµĖĶµ½µŲÖ·¼Ä“ęĘ÷MAR£»
£Ø2£©½«EROMŹä³öµÄÄŚČŻĖĶµ½ÖøĮī¼Ä“ęĘ÷IR£»
£Ø3£©PC ¼Ó1£»
£Ø4£©AµÄÄŚČŻĖĶµ½Źä³ö¼Ä“ęĘ÷OŹä³ö”£
ÉĻĆęø÷ÖøĮīµÄÖøĮīČ«³ĢµÄĆæŅ»²½¶¼¶ŌÓ¦×ÅŅ»øö¼ĘĖ滜µÄ»ł±¾¶Æ×÷£¬ÓÉ“Ėæɼū¼ĘĖ滜µÄ»ł±¾¶Æ×÷ŹĒ¼ĘĖ滜Äܹ»Ķź³Éø÷ÖÖČĪĪńµÄ»ł“””£
“ÓLDA”¢ADD”¢SUBµÄÖøĮīČ«³Ģ²½Öč£Ø4£©æÉŅŌ擵½£¬ŅŖČ”³öŌŚ“ę“¢Ę÷ÖŠµÄŹż¾Ż£¬¶¼ŅŖ½«ÖøĮī¼Ä“ęĘ÷IRÖŠµÄÖøĮī²Ł×÷Źż»ŲĖĶµ½µŲÖ·¼Ä“ęĘ÷MAR£¬ÕāŹĒ·ĆĪŹ“ę“¢Ę÷µÄĶØŠŠ×÷·Ø”£½«ÖøĮī²Ł×÷ĀėŗĶ²Ł×÷Źż½ųŠŠ²š·Ö£¬ŹĒ¼ĘĖ滜ÖøĮī·ÖĪö²»æÉȱɣµÄŅ»²½”£
Ī¢ÖøĮīĒż¶Æ×ÜĻß½į¹¹µÄ¼ĘĖ滜»ł±¾×“Ģ¬µÄ±ä»Æ£¬ŹĒÓɼĘĖ滜æŲÖĘ×ÖµÄÖµĄ“Č·¶ØµÄ”£ÕāĢؼĘĖ滜µÄæŲÖĘ×ÖŹĒCpEpLmErLiEiLaEaSuEuLbLo£¬¹²12Ī»£¬ÖøĮīČ«³ĢµÄĆæŅ»²½¶¼æÉŅŌÓĆŅ»øöæŲÖĘ×ÖµÄÖµĄ“Öø»Ó£¬Ņņ“Ė°Ń¼ĘĖ滜æŲÖĘ×ÖµÄŅ»øöÖµ³ĘĪŖŅ»ĢõĪ¢ÖøĮī”£
Ī¢ÖøĮīµÄ¼ÆŗĻ³ĘĪŖĪ¢ÖøĮī³ĢŠņ”£ĄżČēLDAµÄÖøĮīČ«³ĢÓĆĪ¢ÖøĮīŠ“³öŹĒ£ŗ
011000000000
000110000000
100000000000
001001000000
000100100000
ÖøĮīµÄĪ¢ÖøĮī³ĢŠņŅ»°ć³ĘĪŖĄżŠŠ³ĢŠņ”£
ÖøĮīĄżŠŠ³ĢŠņÖŠµÄĪ¢ÖøĮī±ŲŠėŃĻøńµŲ°“×ÅŅ»¶ØµÄĖ³Šņ³öĻÖ£¬Ćæ“ĪĪ¢ÖøĮī³öĻÖ¾Ķ»įŹ¹¼ĘĖ滜Ķź³ÉŅ»øö»ł±¾¶Æ×÷£¬Õā¾ĶŹĒĪ¢ÖøĮīµÄÖ“ŠŠ¹ż³Ģ”£ÓÉÓŚĆæŅ»øöÖøĮīĖł°üŗ¬µÄĪ¢ÖøĮīŹĒ¹Ģ¶ØµÄ£¬ÖøĮīµÄÖ“ŠŠ¾Ķ»įÖŲø“Ö“ŠŠĄżŠŠ³ĢŠņµÄĪ¢ÖøĮī£¬¼ÓÉĻĪ¢ÖøĮīÖ“ŠŠµÄŹ±¼äĶłĶłŹĒ¹Ģ¶ØµÄ£¬ĖłŅŌĖ³“ĪÖ“ŠŠµÄĪ¢ÖøĮīŹ±¼ä±»³ĘĪŖ»śĘ÷½ŚÅÄ”£
ĻŌČ»ĄżŠŠ³ĢŠņµÄĪ¢ÖøĮīŹĒ½ŚÅÄŗĶÖøĮīµÄŗÆŹż£¬Ņ²¾ĶŹĒĖµ£¬ÖøĮīŅ»¶Ø£¬½ŚÅÄŅ»¶Ø£¬ÄĒĆ“Ī¢ÖøĮīŅ²¾ĶČ·¶ØĮĖ”£ŌŁ½ųŅ»²½·ÖĪö£¬Ī¢ÖøĮīŹĒ¼ĘĖ滜æŲÖĘ×ÖµÄŅ»øöÖµ£¬Ī¢ÖøĮīµÄĆæŅ»Ī»Źż¶¼ŹĒ¶ŌÓ¦æŲÖĘĻßµÄŅ»øöÖµ£¬Ņņ“ĖæŲÖĘĻßµÄÖµŅ²ŹĒÓɽŚÅÄŗĶÖøĮīĄ“Č·¶ØµÄ”£Čē¹ū½«ĆæĢõæŲÖĘĻߥķ½ā³ÉĀß¼±äĮ棬ÄĒĆ“ĖüĆĒ¾Ķ¶¼ŹĒÖøĮīŗĶ½ŚÅĵÄŗÆŹż”£
½«ÕāĢؼӼõŌĖĖćCPUµÄĆæĢõÖøĮīµÄĄżŠŠ³ĢŠņ¶¼ĀŽĮŠ³öĄ“½ųŠŠ·ÖĪö£¬æÉŅŌĆ÷Č·µŲ·“Ó³ÕāÖÖŗÆŹż¹ŲĻµ”£ĪŖĮĖ·½±ć·ÖĪö£¬°ŃČ«²æÖøĮīµÄ½ŚÅÄ“Õ³ÉŅ»ŃłµÄ6ÅÄ£¬¶ąÓąµÄ½ŚÅÄÓĆæÕ²Ł×÷Ī¢ÖøĮī”°000000000000”±Ģī³ä£¬±ķ 5‑2ĖłŹ¾µÄ¾ĶŹĒÕāÖÖĒéæö”£
Óɱķ 5‑2æÉŅŌ擳öÖøĮīµÄÖ“ŠŠŹĒĶعż¼ĘĖ滜æŲÖĘ×ֵıä»ÆĄ“ŹµĻֵģ¬¶ų¼ĘĖ滜æŲÖĘ×ֵıä»Æ»įĖę׎ŚÅÄŗĶÖøĮīµÄ²»Ķ¬¶ų²»Ķ¬£¬¼ĘĖ滜æŲÖĘ×ÖµÄĆæŅ»øöĀß¼±äĮ涼ŹĒ»śĘ÷½ŚÅıäĮæŗĶÖøĮī±äĮæµÄŗÆŹż”£
ĪŽĀŪŹĒ“ÓÖøĮīČ«³ĢµÄ·ÖĪö»¹ŹĒ±ķ 5‑2¶¼æÉŅŌ擵½£¬ĆæøöÖøĮīµÄĒ°3ÅĶ¼ŹĒŅ»ŃłµÄ£¬Õā3ÅĵļĘĖ滜æŲÖĘ×ÖÖ»Ėę½ŚÅıä»Æ£¬ÓėÖøĮīĪŽ¹Ų”£Õā3ÅĽöŹĒ½«ÖøĮī“ÓEROMÖŠČ”³öĄ“£¬·Åµ½ÖøĮī¼Ä“ęĘ÷IRÖŠ£¬PC¼Ó1£¬ĖłŅŌ±»ČĻ¶ØÖ»ŹĒŅ»øöČ”³öÖøĮīµÄ¹ż³Ģ£¬½ŠÖøĮīµÄČ”ÖøÖÜĘŚ”£ĆæøöÖøĮīµÄČ”ÖøÖÜĘŚŅŌĶāµÄ¶Æ×÷¹ż³Ģ½ŠÖøĮīµÄÖ“ŠŠÖÜĘŚ”£Č”ÖøÖÜĘŚŗĶÖ“ŠŠÖÜĘŚŗĻĘšĄ“µÄ¹ż³Ģ¾ĶŹĒÖøĮīÖÜĘŚ”£¼ĘĖ滜֮ĖłŅŌÄܹ»×Ō¶ÆµŲÖ“ŠŠÖøĮī£¬“Ó¶ųĶź³ÉČĪĪń£¬ŗĶÖøĮīµÄČ”ÖøÖÜĘŚÖ»ŌŚ½ŚÅĵÄĒż¶ÆĻĀ½ųŠŠ¶Æ×÷ÓŠ¹Ų”£
¼Ó¼õŌĖĖćCPUµÄÖøĮīČ”ÖøÖÜĘŚÕ¼3øö½ŚÅÄ£¬¶ųÖøĮīÖ“ŠŠÖÜĘŚ×ī¶ąŅ²ŹĒ3øö½ŚÅÄ£¬ĖłŅŌÖøĮīÖÜĘŚŹĒ6øö½ŚÅÄ”£
±ķ5‑2 ÖøĮīŗĶ¼ĘĖ滜æŲÖĘ×Ö±ä»Æ±ķ
ÖøĮīÖś¼Ē·ū | »śĘ÷¶Æ×÷ | ½ŚÅÄ | Cp | Ep | Lm | Er | Li | Ei | La | Ea | Su | Eu | Lb | Lo |
LDA R | PC”śMAR | 1 | 0 | 1 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
EROM”śIR | 2 | 0 | 0 | 0 | 1 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | |
PC+1 | 3 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | |
IR”śMAR | 4 | 0 | 0 | 1 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | |
EROM”śA | 5 | 0 | 0 | 0 | 1 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | |
| 6 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | |
ADD R | PC”śMAR | 1 | 0 | 1 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
EROM”śIR | 2 | 0 | 0 | 0 | 1 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | |
PC+1 | 3 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | |
IR”śMAR | 4 | 0 | 0 | 1 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | |
EROM”śB | 5 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | |
A+B”śA | 6 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 1 | 0 | 0 | |
SUB R | PC”śMAR | 1 | 0 | 1 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
EROM”śIR | 2 | 0 | 0 | 0 | 1 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | |
PC+1 | 3 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | |
IR”śMAR | 4 | 0 | 0 | 1 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | |
EROM”śB | 5 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | |
A£B”śA | 6 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 1 | 1 | 0 | 0 | |
OUT | PC”śMAR | 1 | 0 | 1 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
EROM”śIR | 2 | 0 | 0 | 0 | 1 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | |
PC+1 | 3 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | |
A”śO | 4 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 1 | |
| 5 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | |
| 6 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | |
STP | PC”śMAR | 1 | 0 | 1 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
EROM”śIR | 2 | 0 | 0 | 0 | 1 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | |
STOP | 3 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
¼ĘĖ滜µÄ¶Æ×÷¶¼ŹĒÓÉĪ¢ÖøĮīĄ“Öø»ÓµÄ£¬¶ųĪ¢ÖøĮīµÄ²śÉśÓÖŹĒÓÉ»śĘ÷½ŚÅÄŗĶÖøĮīĄ“¾ö¶ØµÄ£¬Ņņ“Ė¼ĘĖ滜µÄ¶Æ×÷ŗĶĖüĆĒÖ®¼äµÄĀß¼¹ŲĻµĆÜĒŠĻą¹Ų”£ÓÉ»śĘ÷½ŚÅÄŗĶÖøĮī±ä¶Æ²śÉśĪ¢ÖøĮīµÄĀß¼µēĀ·ŹĒ¼ĘĖ滜æŲÖʵÄŗĖŠÄ£¬ÕāøöŗĖŠÄĀß¼µēĀ·³ĘĪŖ¼ĘĖ滜µÄæŲÖĘ¾ŲÕó”£
5.3.1. æŲÖĘ¾ŲÕóÖŠµÄŗÆŹżÓĆĻß±ķŹ¾ÖøĮī·ÖĪö±ķ 5‑2æÉŅŌ擳ö×Ō±äĮæ¾ĶÓ¦øĆÓŠ11øö£¬ÄĒ¾ĶŹĒ½ŚÅÄ1”¢2”¢3”¢4”¢5”¢6£¬ÖøĮīLDA”¢ADD”¢SUB”¢OUT”¢STP”£ĪŖĮĖ·½±ćŹéŠ“£¬½«½ŚÅÄŗĶÖøĮī¶¼ÉčÖĆ³ÉŅ»Ī»µÄ“śĀė£¬ø÷×ŌµÄ“śĀė¾ĶČē±ķ 5‑3ĖłŹ¾ÄĒŃł”£STPÖøĮīµÄ×÷ÓĆŹĒĶ£Ö¹¼ĘĖ滜ŌĖŠŠ£¬ĖüµÄ×÷ÓĆ²»Ķعż¼ĘĖ滜æŲÖĘ×ÖĄ“Ķź³É£¬Ņņ“ĖÉč¼Ę»śæŲÖĘ¾ŲÕó²»ÓĆÉčÖĆSTPµÄ“śĀė£¬ÕāŃł×Ō±äĮææ¼ĀĒ10øö¾ĶæÉŅŌĮĖ”£Ņņ±äĮæ¾ĶŹĒĆæøöÉč±øµÄæŲÖĘĻߣ¬ÕāĄļŅ»¹²ÓŠ12Ģõ”£
±ķ5‑3 ½ŚÅÄŗĶÖøĮī“śĀė
½ŚÅÄĆū³Ę | “śĀė | ±äĮæĆū³Ę | “śĀė |
µŚĮłÅÄ | A | LDA | G |
µŚĪåÅÄ | B | ADD | H |
µŚĖÄÅÄ | C | SUB | I |
µŚČżÅÄ | D | OUT | J |
µŚ¶žÅÄ | E | STP |
|
µŚŅ»ÅÄ | F |
|
|
Ē°ĆęµÄ·ÖĪö¶ą“ĪĖµĆ÷ŅŖ½«ÖøĮīµÄ²Ł×÷ĀėŗĶ²Ł×÷Źż·Åµ½ÖøĮī¼Ä“ęĘ÷IRÖŠ£¬ĘäÄæµÄÓŠĮ½øö”£ĘäŅ»£¬½«ÖøĮīĀė×Ŗ»Æ³ÉŅ»ĢõÄܹ»±źÖ¾øĆÖøĮīÖ“ŠŠµÄĻߣ»Ę䶞£¬½«ÖøĮīµÄ²Ł×÷ĀėŗĶ²Ł×÷Źż·ÖĄė£¬ŅŌ±ć½ųŠŠĻąÓ¦µÄ“¦Ąķ”£
ÖøĮī²Ł×÷ĀėæÉŅŌĶعżŅėĀėĘ÷×Ŗ»Æ³Éø÷×ŌµÄ±źÖ¾Ļß”£Ķ¼5‑3ŹĒ½«ÖøĮī¼Ä“ęĘ÷µÄøß4Ī»Ņż³öĻßĶعżŅėĀėĘ÷Ņė³öÖøĮīĻßµÄĀß¼µēĀ·”£Źµ¼Źµ±ÖŠ£¬Ö»ŅŖÄÄŅ»øöÖøĮīµÄ²Ł×÷Āė½ųČėÖøĮī¼Ä“ęĘ÷IR£¬Į¢¼“ŌŚµÄŹä³ö¶Ė¾Ķ»įÓŠĻąÓ¦µÄÖøĮīĻßĪŖ1£¬±ķĆ÷Ö“ŠŠµÄŹĒÕāŅ»ĢõÖøĮī”£

Ķ¼5‑3 ÖøĮīŅėĀėĘ÷
½ŚÅÄĘ÷ĄżŠŠ³ĢŠņµÄ6øö½ŚÅÄæÉŅŌÓĆŅ»øö6Ī»µÄ»·ŠŠ¼ĘŹżĘ÷µÄŹä³ö¶Ė±ķŹ¾”£Ķ¼5‑4ÖŠµ±Clr=1Ź±Źä³ö¶ĖF=1£¬½ųČėµŚŅ»øö½ŚÅÄ£¬ŅŌŗóĆæŅ»“ĪClk=1¶¼»įŹ¹ĪŖ1µÄŹä³ö¶ĖĻņ×óŅʶÆŅ»Ī»£¬“Ó¶ųĖ³“Ī±ķŹ¾2”¢3”¢4”¢5”¢6ÅÄ”£

Ķ¼5‑4½ŚÅÄĘ÷
æŲÖĘ¾ŲÕóÕęÖµ±ķ½«ÕāŠ©×Ō±äĮæŗĶŅņ±äĮæµÄÖµ±ä»Æ¹ż³ĢĮŠ³ÉÕęÖµ±ķ£¬¾ĶµĆµ½±ķ5‑4”£øł¾ŻĀß¼±äĮæŌĖĖćŹ½A+A=AÖŖµĄ£¬ŌŚÕęÖµ±ķÖŠĻąĶ¬µÄ²æ·Ö×÷ÓĆŹĒĻąĶ¬µÄ£¬ĖłŅŌ±ķÖŠĆæøöÖøĮīµÄÖøÖÜĘŚµÄ3øö½ŚÅľĶ¼ņŠ“³ÉŅ»øö”£ÓÉÓŚĒ°3øö½ŚÅÄŅņ±äĮæµÄ±ä»ÆŹĒÓėÖøĮīĪŽ¹ŲµÄ£¬Ņņ¶ų±ķÖŠÕā²æ·ÖÖøĮī±äĮæµÄÖµÓĆæÕ°×±ķŹ¾”£±ķÖŠ1~3ŠŠŹĒø÷ÖøĮīµÄČ”ÖøÖÜĘŚ£¬4~6ŠŠŹĒÖøĮīLDAµÄÖ“ŠŠÖÜĘŚ£¬7~9ŠŠŹĒÖøĮīADDµÄÖ“ŠŠÖÜĘŚ£¬10~11ŠŠŹĒÖøĮīSUBµÄÖ“ŠŠÖÜĘŚ£¬13~15ŠŠŹĒÖøĮīOUTµÄÖ“ŠŠÖÜĘŚ”£
±ķ5‑4 æŲÖĘ¾ŲÕóÕęÖµ±ķ
»śĘ÷¶Æ×÷ | A | B | C | D | E | F | G | H | I | J | Cp | Ep | Lm | Er | L i | E i | La | Ea | Su | Eu | Lb | Lo |
PC”śMAR | 0 | 0 | 0 | 0 | 0 | 1 |
|
|
|
| 0 | 1 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
EROM”śIR | 0 | 0 | 0 | 0 | 1 | 0 |
|
|
|
| 0 | 0 | 0 | 1 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
PC+1 | 0 | 0 | 0 | 1 | 0 | 0 |
|
|
|
| 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
IR”śMAR | 0 | 0 | 1 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 |
EROM”śA | 0 | 1 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 |
ĪŽ¶Æ×÷ | 1 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
IR”śMAR | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 |
EROM”śB | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 |
A+B”śA | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 1 | 0 | 0 |
IR”śMAR | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 1 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 |
EROM”śB | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 |
A£B”śA | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 1 | 1 | 0 | 0 |
A”śO | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 1 |
ĪŽ¶Æ×÷ | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
ĪŽ¶Æ×÷ | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
øł¾Ż±ķ5‑4ø÷ŠŠÖ®¼äŹĒ»ņµÄ¹ŲĻµ£¬Ķ¬ŠŠ×Ō±äĮæµÄÖµŹĒÓėµÄ¹ŲĻµ£¬Ó¦ÓĆŅņ±äĮæµÄĀß¼ŗÆŹżĒó·Ø£¬µĆ
Cp=A'B'C'DE'F'
Ep=A'B'C'D'E'F
Lm=A'B'C'D'E'F+A'B'CD'E'F'(GH'I'J'+G'HI'J'+G'H' IJ')
Er =A'B'C'D'EF'+A'BC'D'E'F'(GH'I'J'+G'HI'J'+G'H' IJ' )
Li =A'B'C'D'EF'
Ei =A'B'CD'E'F' (GH'I'J'+G'HI'J'+G'H' IJ')
La=A'BC'D'E'F'GH'I'J'+AB'C'D'E'F'(G'HI'J'+G'H' IJ')
Ea=A'D'CE'F'G'H'I'J
Su=AB'C'D'E'F'G'H' IJ'
Eu=AB'C'D'E'F'(G'HI'J'+G'H' IJ')
Lb=A'BC'D'E'F'(G' HI'J'+G'H' IJ')
Lo=A'B'CD'E'F' G'H'I'J
ŌŚ»·ŠĪ¼ĘŹżĘ÷ÖŠ£¬ŅņĪŖE=1 ±ŲÓŠ A=B=C=D=F=0 “Ó¶ų A'B'C'D'EF'=1
¶ųµ±E=0Ź±£¬²»ĀŪ”¢A”¢B”¢C”¢D”¢FĪŖŗĪÖµ¶¼ÓŠ A'B'C'D'EF'=0
ÓŚŹĒÓŠ
A'B'C'D'EF'=E
Ķ¬Ąķ
A'B'C'D'E'F=F
A'B'C'DE'F'=D
A'B'CD'E'F'=C
A'BC'D'E'F'=B
AB'C'D'E'F'=A
¶ŌÓŚŅ»ĢؼĘĖ滜Ą“Ėµ£¬ø÷ÖøĮīÖ®¼äŅ²ŹĒĮ½Į½»„ĻąÅųāµÄ£¬¹ŹŅ²ÓŠ
GH'I'J'=G
G'HI'J'=H
G'H'IJ'=I
G'H'I'J=J
ÕāŃł£¬ÉĻĆęµÄĀß¼±ķ“ļŹ½æÉŅŌ»Æ³É
Cp=D
Ep=F
Lm=F+C(G+H+I)
Er =E+B(G+H+I)
Li =E
Ei =C(G+H+ I)
La=BG+A(H+ I)
Ea=CJ
Su=AI
Eu=A(H+I)
Lb=B(H+I)
Lo=CJ
5.3.2. æŲÖĘ¾ŲÕóµēĀ·øł¾ŻÉĻĆę¼ĘĖ滜æŲÖĘ×ÖµÄ12øöŅņ±äĮæµÄŗÆŹż£¬ŗÜČŻŅ×»³öÕāĢؼӼõŌĖĖćCPUµÄæŲÖĘ¾ŲÕóµēĀ·Ķ¼”£Ķ¼5‑5µÄÉĻĆę6ĢõĻߏĒ½ŚÅÄĻߣ¬½ÓĻĀĄ“µÄ4ĢõŹĒÖøĮīĻߣ¬ĻĀĆęµÄŹä³öŹĒ¼ĘĖ滜æŲÖĘ×ÖµÄ12ĢõĻß”£ÕāÖÖÄܹ»·¢³ö¼ĘĖ滜æŲÖĘ×ֵĵēĀ·£¬Éč¼ĘĘšĄ“×ÜŹĒׯŗį½»“ķµÄŠĪŹ½£¬æ“ĘšĄ“ŗÜĻń¾ŲÕó£¬Ņņ¶ų³ĘĪŖ¼ĘĖ滜µÄæŲÖĘ¾ŲÕó”£
¼Ó¼õŌĖĖćCPUµÄæŲÖĘ¾ŲÕóĻą¶ŌŹĒ±Č½Ļ¼ņµ„µÄ£¬ø“ŌÓ¼ĘĖ滜µÄׯŗįµ¼Ļß»į³É°ŁÉĻĒ§£¬Éč¼ĘĶ¼»į·Ē³£ÅÓ“ó”£Źµ¼ŹÉč¼ĘÖŠæÉŅŌ½«æŲÖĘ¾ŲÕóµÄÉč¼Ę·Öæé½ųŠŠ£¬Č»ŗóøł¾Żæé¼äµÄĀß¼¹ŲĻµ½ųŠŠŌöĢķ”£ŌŚ²»Ķ¬µÄæéÖ®¼äæŲÖĘĻß»į³öĻÖÖŲø“£¬øł¾ŻÖŲø“µÄæŲÖĘĻßÖ®¼äŹĒĀß¼»ņµÄ¹ŲĻµ£¬ŌŁ“óµÄæŲÖĘ¾ŲÕóŅ²ČŻŅ×Éč¼Ę³öĄ“”£

Ķ¼5‑5 æŲÖĘ¾ŲÕóµÄµēĀ·
5.4. æŲÖĘĘ÷ŗĶÕū»ś¹¤×÷¹ż³Ģ
5.4.1. æŲÖĘĘ÷ÕāĢؼӼõŌĖĖćCPUµÄæŲÖĘĘ÷ŌŚ6øö½ŚÅÄÖŠÓŠŠņµŲ·¢³öĪ¢ÖøĮī£¬“Ó¶ųĶź³ÉĆæĢõÖøĮīµÄÖ“ŠŠ¹ż³Ģ”£ÕūøöæŲÖĘĘ÷µÄµēĀ·ČēĶ¼5‑6ĖłŹ¾£¬ÕāĄļÖøĮī¼Ä“ęĘ÷IRµÄøß4Ī»Ö±½ÓĮ¬½ÓŌŚÖøĮīŅėĀėĘ÷µÄŹäČė¶Ė£¬¶ųÖøĮīŅėĀėĘ÷µÄŹä³ö¶Ė¾ĶŹĒ4øöÖøĮīµÄÖøĮīĻß”£ÖøĮīĻßŗĶ6Ī»»·ŠŠ¼ĘŹżĘ÷µÄŹä³ö¶Ė£¬Ö±½Ó³ÉĪŖĮĖæŲÖĘ¾ŲÕóµÄŹäČė¶Ė”£

Ķ¼5‑6 æŲÖĘĘ÷µēĀ·
5.4.2. Õū»ś¹¤×÷¹ż³ĢÕāĢؼĘĖ滜µÄÕū»ś¹¤×÷¹ż³ĢČēĻĀ£ŗ
µ±Ź¹ÓƵÄČĖŗĻÉĻµēŌ“æŖ¹ŲÖ®ŗó£¬ÓÉĶ¼ 5‑6æÉŅŌ擳öĖ²¼äÓŠŅ»øöøßµēĪ»Ź¹µĆ“„·¢Ę÷ÖĆĪ»£¬ÓŚŹĒ½ÓŌŚÕāøö“„·¢Ę÷Q¶ĖµÄŹ±ÖÓĀö³åÕńµ“Ę÷ĀķÉĻæŖŹ¼¹¤×÷£¬²»¶ĻµŲ·¢³öøßʵµÄŹ±ÖÓĀö³å”£ŌŚĘō¶ÆæŖ¹ŲŗĻÉĻĶ¬Ź±£¬Clr¶ĖŅ²Ė²¼äĪŖ1£¬ÓŚŹĒĻąÓ¦µÄÉč±ø±»³õŹ¼»Æ£¬ŌŚŹ±ÖÓÕšµ“Ö®Ē°ŠĪ³É³ĢŠņ¼ĘŹżĘ÷PC=0000£¬»·ŠĪ¼ĘŹżĘ÷µÄÖµĪŖ000001µČ”£
£Ø1£©ClrŹĒĖ²¼ä×÷ÓĆµÄ£¬¹Źµ±ÓŠŠ§Ź±ÖÓĀö³åµ½Ą“µÄŹ±ŗņ£¬»śĘ÷µÄø÷ÖÖÉč±øŅŃ¾½ųČėĮĖÕż³£¹¤×÷דĢ¬”£ÓÉÓŚF=1£¬ÓŚŹĒ“ÓæŲÖĘ¾ŲÕó·¢³öµÄ¼ĘĖ滜æŲÖĘ×ÖŹĒ 011000000000£¬¼“Ep=1£¬Lm=1”£ÕāŃł£¬µ±µŚ1øöŹ±ÖÓĀö³åµ½Ą“Ź±£¬PCÖŠµÄÖµ0000ĖĶµ½ĮĖMAR£¬ÓŚŹĒ¾Ķє֊ĮĖ0000ŗŵ„ŌŖ”£
£Ø2£©Óė“ĖĶ¬Ź±£¬ Clkµ½Ą“Ź¹»·ŠŠ¼ĘŹżĘ÷µÄÖµ±ä³ÉĮĖ000010£¬¼“E=1£¬ÓŚŹĒµŚ2øöŹ±ÖÓĀö³åµ½Ą“Ö®Ē°£¬Er=1£¬Li=1”£µ±µŚ2øöŹ±ÖÓĀö³åµ½Ą“Ö®Ź±£¬0000ŗŵ„ŌŖµÄÄŚČŻ±»ĖĶµ½ĮĖÖøĮī¼Ä“ęĘ÷IR£¬ÕāŹ±IR½«Ęäøß4Ī»ĖĶµ½CONµÄÖøĮīŅėĀėĘ÷”£
£Ø3£©Óė“ĖĶ¬Ź±£¬»·ŠĪ¼ĘŹżĘ÷µÄÖµ±ä³ÉĮĖ000100£¬¼“D=1£¬ÓŚŹĒµŚ3øöŹ±ÖÓµ½Ą“Ö®Ē°Ö»ÓŠ Cp=1”£µ±µŚČżøöŹ±ÖÓĀö³åµ½Ą“Ö®Ź±PC¼Ó1£¬µŚ4øö½ŚÅıäĮæC=1”£
ŅŌÉĻ£Ø1£©~£Ø3£©ŹĒČ”ÖøÖÜĘŚµÄ¹¤×÷£¬¼Ģŗóµ½Ą“µÄŹ±ÖÓĀö³å½«ŅŖĶź³É¶ŌČ”³öµÄ0000ŗŵ„ŌŖµÄÖøĮīµÄÖ“ŠŠ¹¤×÷£¬£Ø4£©~£Ø6£©½ųČėÖ“ŠŠÖÜĘŚ”£
£Ø4£©¼ŁČē0ŗÅ“ę“¢µ„ŌŖ“ę“¢µÄÖøĮīŹĒ£ŗ LDA 1010£¬ÄĒĆ““ÓµŚ2øö½ŚÅÄÖ®ŗó£¬ĶعżÖøĮīŅėĀėĘ÷µÄ¹¤×÷£¬LDAµÄÖøĮīĻßG¾ĶŅ»Ö±ĪŖ1”£ĖüŗĶ½ŚÅÄCŗĻ×÷Ź¹ Ei=1£¬ Lm=1£¬µ±µŚ4øöŹ±ÖÓĀö³åµ½Ą“Ź±£¬Ź¹µŚ5øö½ŚÅÄĻßB=1£¬“Ó¶ųŹ¹Er=1£¬La=1”£
£Ø5£©µŚ5øöŹ±ÖÓĀö³åµ½Ą“Ö®Ē°Er=1£¬La=1£¬µ±ClkÓÉ0±äµ½1µÄĖ²¼ä£¬¾Ķ½«1010“ę“¢µ„ŌŖµÄÄŚČŻĖĶµ½ĄŪ¼ÓĘ÷AĮĖ”£Óė“ĖĶ¬Ź±½ŚÅÄĻßA=1”£
£Ø6£©ŌŚ½ŚÅıäĮæA=1Ö®ŗóµÄµŚ6øöClk=1µ½Ą“Ö®ŗó£¬ÓÖ»įÓŠ½ŚÅÄĻßF=1”£
£Ø1£©~£Ø6£©µÄŃ»·ÖŲø“£¬æÉŅŌ²»¶ĻµŲÖ“ŠŠŌŚ“ę“¢Ę÷ÖŠĖ³Šņ“ę·ÅµÄÖøĮī”£””Čē¹ūÖøĮī¼Ä“ęĘ÷IRÖŠµĆµ½µÄÖøĮī“śĀėŹĒ1111£¬ÄĒĆ“ÖøĮīŅėĀėĘ÷Ņė³öµÄøßµēĪ»ĻßÖ±½ÓĖĶµ½Ęō¶ÆĶ£Ö¹“„·¢Ę÷µÄR¶Ė£¬ÖĮŹ¹Q=0£¬ÓŚŹĒ¾ĶĶ£Ö¹ĮĖŹ±ÖÓĀö³åÕńµ“Ę÷µÄÕšµ“£¬Ņ²¾ĶŹ¹ÕāĢؼĘĖ滜Ķ£Ö¹ĮĖ¹¤×÷”£
5.4.3. Ź±ŠņŅ»ĢؼĘĖ滜ӊŠķ¶ą²æ¼ž×é³É£¬ŅŖŹ¹ÕāŠ©²æ¼žÓŠĢõ²»ĪɵŲ½ųŠŠ¹¤×÷£¬¾Ķ±ŲŠėŅŖĖüĆĒ°“ÕÕŅ»¶ØµÄŹ±¼äĖ³Šņ¶Æ×÷£¬Õā¾ĶŹĒ¼ĘĖ滜Ź±ŠņĪŹĢā”£¼ĘĖ滜֊ŠÅĻ¢µÄĮ÷¶ÆÓŠĻČÓŠŗó£¬Čē¹ū“«ŹäµÄ¹ż³ĢÖŠµßµ¹ĮĖĖ³Šņ£¬±ŲČ»»į³öĻÖ“ķĪóµÄ½į¹ū”£Ņņ“Ė¼ĘĖ滜µÄÉč¼Ę·ÖĪöÖŠ£¬½«Ź±Šņ¶¼·ÅŌŚŅ»øöŗÜÖŲŅŖµÄĪ»ÖĆæ¼ĀĒ£¬ÓČĘäŹĒŌŚ¶ąĢõŠÅĻ¢ĶØĀ·½ųŠŠŹż¾Ż“«ĖĶŹ±£¬øüŅŖ×¢ŅāÄÄŅ»Ā·Źż¾ŻĻȵ½“ļ£¬ŹĒ·ń»į“ķŠņ”£Čē¹ū·¢ÉśĮĖŹ±ŠņµÄ“ķĪó£¬ÄĒĆ“»ņÕßÉč·Ø¼Óæģ½ĻĀżµÄŅ»Ā·“«ŹäĖŁ¶Č£¬»ņÕß½µµĶ½ĻæģµÄŅ»Ā·“«ŹäĖŁ¶Č£¬ŅŌ±ćµ÷Õūµ½ÕżČ·µÄŹ±¼äĖ³Šņ”£
Ö÷ʵÓė½ŚÅļĘĖ滜µÄŹ±¼äĖ³ŠņŹĒÓɼĘĖ滜µÄʵĀŹŹ±ÖÓĄ“Č·¶ØµÄ”£æŲÖĘĘ÷ÖŠŹÆÓ¢Õńµ“Ę÷²śÉśµÄÕšµ“ʵĀŹŅ»°ć½Š¼ĘĖ滜µÄÖ÷ʵ”£¼ĘĖ滜µÄÖ÷ʵ±ķĆ÷¼ĘĖ滜µÄCPU ŌĖŠŠĖŁ¶Č£¬ŹĒ¼ĘĖ滜Ź®·ÖÖŲŅŖµÄ²ĪŹż”£Ö÷ʵµÄŅ»øöÕńµ“ÖÜĘŚ¾ö¶Ø¼ĘĖ滜µÄŅ»øö»ł±¾¶Æ×÷£¬Ņņ¶ų³ĘÖ®ĪŖŅ»øö»śĘ÷½ŚÅÄ”£¼ĘĖ滜µÄŹ±ŠņŹĒÓĆ½ŚÅÄĄ“Įæ¶ČµÄ”£
ĪŖĮĖŃŠ¾æ·½±ć£¬ŌŚ×ÜĻß½į¹¹µÄ¼ĘĖ滜ĻµĶ³ÖŠ£¬ÓÖĢį³ö×ÜĻßÖÜĘŚ”¢ÖøĮīÖÜĘŚ”¢Č”ÖøÖÜĘŚ”¢Ö“ŠŠÖÜĘŚµČøÅÄī”£
ĖłĪ½µÄ×ÜĻßÖÜĘŚŹĒÖø×ÜĻß“«ŹäŅ»øöµ„Ī»Źż¾ŻĖłŠčŅŖµÄ½ŚÅÄŹż”£Éč¼ĘµÄ¼Ó¼õŌĖĖćCPU£¬“«ĖĶŅ»øöµ„Ī»Źż¾ŻÖ»ŅŖŅ»øö½ŚÅÄ£¬¶ųÓŠµÄ¼ĘĖ滜æÉÄÜŠčŅŖĮ½øöŅŌÉĻµÄ½ŚÅÄ”£
Č”ÖøÖÜĘŚŹĒ“Ó“ę“¢Ę÷ÖŠČ”³öÖøĮīĖłŠčŅŖµÄ½ŚÅÄŹż”£¼Ó¼õŌĖĖćCPUµÄČ”ÖøÖÜĘŚŹĒ3øö½ŚÅÄ”£Ö“ŠŠÖÜĘŚŹĒÖ“ŠŠČ”³öµÄÖøĮīĖłŠčŅŖµÄ½ŚÅÄŹż”£¼Ó¼õŌĖĖćCPUÖ“ŠŠÖÜĘŚŅ²ŹĒ3øö½ŚÅÄ”£Č”ÖøÖÜĘŚŗĶÖ“ŠŠÖÜĘŚ×é³ÉĮĖ¼ĘĖ滜µÄÖøĮīÖÜĘŚ”£¼Ó¼õŌĖĖćCPUµÄÖøĮīÖÜĘŚŹĒ6øö½ŚÅÄ”£
Ź±ŠņĶ¼ĪŖĮĖŃŠ¾æŹ±Šņ£¬ČĖĆĒ³£ÓĆĶ¼Ą“±ķŹ¾£¬ÕāÖÖĶ¼½ŠŹ±ŠņĶ¼£Ø¼ūĶ¼ 5‑7£©”£Ķ¼ÖŠ“ÓÉĻµ½ĻĀ·Ö±š“ś±ķÖ÷ʵ£¬Č”ÖøÖÜĘŚ£¬Ö“ŠŠÖÜĘŚŗĶÖøĮīÖÜĘŚ”£“ÓĶ¼ÉĻæÉŅŌ擵½Č”ÖøÖÜĘŚÕ¼3øö½ŚÅÄ£¬Ö“ŠŠÖÜĘŚÕ¼3øö½ŚÅIJ¢ĒŅŹĒŌŚČ”ÖøÖÜĘŚÖ®ŗó”£ÖøĮīÖÜĘŚÕ¼6øö½ŚÅÄ”£
Ņ»°ćµÄŹ±ŠņĶ¼¶¼ŅŖ·“Ó³³öÖ÷ŅŖ²æ¼ž¼äŌŚŹ±¼äÉĻµÄĻą»„Š×÷¹ŲĻµ£¬Ņņ¶ųŅ»øö¼ĘĖ滜µÄŹ±ŠņĶ¼ŅŖ±ČĶ¼5‑7ø“Ōӵƶą£¬æÉŅŌ“ÓŹ±ŠņĶ¼ÉĻĒ峞µŲÖŖµĄø÷øö²æ¼ž¹¤×÷µÄĻČŗóĖ³Šņ£¬ÕāŌŚ¼ĘĖ滜·ĀÕęÉč¼ĘÖŠÓŠŹ®·ÖÖŲŅŖµÄ×÷ÓĆ”£ÓŠŠĖȤµÄ¶ĮÕßæÉŅŌ²Īæ¼Ļą¹Ų׏ĮĻ£¬ŌŚ“Ė²»ĻźĻøĆčŹö”£

Ķ¼5‑7 Ź±Šņ
Ņ»ĢؼĘĖ滜µÄæŲÖĘ¾ŲÕóČ·¶ØĮĖ£¬Ņ²¾ĶĻąµ±ÓŚČ·¶ØĮĖÕāĢؼĘĖ滜µÄÖøĮī¼Æ”£øł¾Ż¼ĘĖ滜µÄÖøĮī¼Æ£¬¾ĶæÉŅŌ½ųŠŠ³ĢŠņÉč¼Ę”£ĻĀĆę¾ĶŅŌĄż×ÓĄ“ĖµĆ÷ĄūÓĆÕāĢؼӼõŌĖĖćCPUČēŗĪĄ“½ųŠŠ³ĢŠņÉč¼Ę”£
5.5.1. »ć±ąŌ“³ĢŠņĄūÓƻ汹ÖøĮī½ųŠŠ³ĢŠņÉč¼Ę£¬¾Ķ½Š×ö»ć±ą³ĢŠņÉč¼Ę”£ÓÉÓŚ»ć±ąÖøĮīŹĒÓė¾ßĢåµÄ¼ĘĖ滜ֱ½ÓĻą¹ŲµÄ£¬Ņņ“ĖŹµ¼ŹŹ¹ÓĆµÄ¼ĘĖ滜»ć±ą³ĢŠņÉč¼ĘŅ²±Č½Ļø“ŌÓ£¬µ±Č»ÕāĄļøų³öµÄ»ć±ą³ĢŠņÉč¼Ę¾Ķ¼ņµ„¶ąĮĖ”£ĪŖĮĖ·½±ć£¬°ŃŹżÓĆ·½ĄØŗÅĄØĘš±ķŹ¾ÕāøöŹżĖłŌŚµÄ“ę“¢µ„ŌŖµŲÖ·”£
”¾Ąż5‑1”æ Óƻ汹³ĢŠņĶź³É 3£«2£«1£4µÄ¼ĘĖć”£
ŅĄ¾Ż¼Ó¼õŌĖĖćCPUµÄÖøĮīĻµĶ³£¬æÉŅŌÉč¼ĘČēĻĀµÄ³ĢŠņ£ŗ
LDA | [3] |
ADD | [2] |
ADD | [1] |
SUB | [4] |
OUT |
|
STP |
|
Õāøö³ĢŠņ½āŹĶŹĒŗÜČŻŅ׵Ĕ£µŚ1ĢõÖøĮīŹĒĖµ½«Źż3×°ČėĄŪ¼ÓĘ÷A£»µŚ2ĢõÖøĮīŹĒ°ŃŹż3ŗĶ2Ļą¼Ó½į¹ū5·ÅŌŚAĄļĆę£»µŚ3ĢõÖøĮīŹĒĖµ½«1ÓėAµÄÄŚČŻ5Ļą¼Ó£¬½į¹ū6·ÅŌŚAĄļĆę£»µŚ4ĢõÖøĮīŹĒĖµ½«AµÄÄŚČŻ6¼õČ„4£¬²¢°Ń½į¹ū2·ÅŌŚAÖŠ£»µŚ5ĢõÖøĮīŹĒĖµ½«AµÄÄŚČŻ2Źä³ö£»µŚĮłĢõÖøĮīŹĒĖµĶ£Ö¹»śĘ÷ŌĖŠŠ”£
ÉĻĆęµÄ³ĢŠņæÉŅŌĖµ½ö½öŹĒĀß¼ÉĻµÄÉč¼Ę£¬Źµ¼ŹÉĻÕāĢؼĘĖ滜ŌõŃłÖ“ŠŠ³ĢŠņ»¹²»Ē峞”£ŌõŃł²ÅÄÜČĆ¼ĘĖ滜Ķź³ÉÕāĻīČĪĪń£æÕāÉę¼°µ½ÖøĮīŗĶŹż¾ŻŌŚ“ę“¢Ę÷ÖŠŌõŃł“ę·ÅµÄĪŹĢā”£
5.5.2. “ę“¢Ę÷·ÖÅäøł¾ŻÖøĮī³ĢŠņµÄĢŲµć£¬æÉŅŌ°Ń“ę“¢Ę÷·ÖĪŖĮ½øöĒųÓņ£¬Ņ»øöŹĒ“ę·ÅÖøĮīµÄĒųÓņ£¬½Š“śĀėĒų£¬ĮķŅ»øö“ę·ÅŅŖ²Ł×÷µÄŹż¾ŻµÄµŲ·½£¬½ŠŹż¾ŻĒų£Ø¼ūĶ¼5‑8£©”£øł¾ŻÕāĢؼĘĖ滜µÄ½į¹¹ĢŲµć£¬“śĀėĒųŅ»¶ØŅŖ·ÅŌŚĒ°Ćę£¬“Ó0000ŗÅ“ę“¢µ„ŌŖæŖŹ¼”£ŅņĪŖÕāĢؼĘĖ滜Ņ»æŖ»ś¾ĶČ„Č”0000ŗŵ„ŌŖµÄŹż¾Ż£¬ĖłŅŌ³ĢŠņŅ»¶ØŅŖ“Ó0000ŗŵ„ŌŖæŖŹ¼“ę·Å”£
ÓÉÖøĮīµÄøńŹ½ÖŖµĄ£¬²Ł×÷ŹżŹĒŹż¾ŻµÄµŲÖ·£¬ĖłŅŌæÉŅŌ½«Źż¾Ż·ÅŌŚ“śĀėĒųŗóĆęµÄČĪŗĪĪ»ÖĆ£¬Ö»ŅŖ²»ŗĶ“śĀėĒųÖŲµž·ÅÖĆ¾ĶæÉŅŌ”£“ĖĢāŹż¾ŻµÄĘšŹ¼µŲÖ·ŹĒ1011(2)£¬Ė³ŠņµŲ“ę·ÅĮĖ3”¢2”¢1ŗĶ4£¬µ±Č»·ÅŌŚ“ę“¢Ę÷ÖŠµÄ¶¼ŅŖŹĒ¶ž½ųÖĘŹż”£

Ķ¼5‑8 “ę“¢Ę÷·ÖÅä
5.5.3. ±ąŅė
ŅņĪŖ¼ĘĖ滜ֻÄÜŹ¶±š¶ž½ųÖĘŹż£¬ĖłŅŌ·ÅČė¼ĘĖ滜“ę“¢Ę÷µÄÖøĮīŗĶŹż¾Ż±ŲŠė¶¼ŹĒ¶ž½ųÖĘŹż”£Óƶž½ųÖĘŹż±ķŹ¾µÄ¼ĘĖ滜ÖøĮī²ÅÄܹ»±»¼ĘĖ滜Ź¶±š£¬ÕāÖÖÖøĮīÓÖ½Š»śĘ÷ÖøĮī”£½«»ć±ąŌ“³ĢŠņ·Ņė³ÉæÉŅŌ±»»śĘ÷Ź¶±šµÄ¶ž½ųÖĘ»śĘ÷ÖøĮī³ĢŠņŗĶŹż¾ŻµÄ¹ż³Ģ½Š±ąŅė”£°Ń”¾Ąż5‑1”æÖŠµÄ»ć±ąŌ“³ĢŠņ±ä³É¶ž½ųÖĘŹż·ÅŌŚ“ę“¢Ę÷ÖŠ£¬µĆµ½Ķ¼5‑8ĖłŹ¾µÄ“ę“¢ŠĪŹ½£¬æÉŅŌ擵½“ę“¢Ę÷ÖŠ³żĮĖ¶ž½ųÖĘŹżÖ®Ķā£¬Ć»ÓŠ±šµÄ¶«Ī÷£ØĶ¼5‑8×īÓŅ±ßµÄ¶ž½ųÖĘŹżŹĒµŲÖ·±ąŗÅ£©”£
ŌŚ½«»ć±ąÖøĮī·Ņė³É»śĘ÷ÖøĮīµÄ¹ż³ĢÖŠ£¬±ŲŠėøł¾ŻŹż¾ŻŌŚ“ę“¢Ę÷ÖŠµÄĪ»ÖĆ£¬Č·¶ØÖøĮīµÄ²Ł×÷Źż£¬ÕāŅŖ“ÓĒ°µ½ŗóÖĮÉŁ”°ÉØĆč”±Į½“Ī”£µŚŅ»“Ī£¬“ÓĒ°µ½ŗ󽫲Ł×÷ĀėŗĶŹż¾Ż·ŅėŗĆ£¬ŌŻ²»Č·¶Ø²Ł×÷Źż£¬²¢½«ÕāŃłµÄÖøĮīŗĶŹż¾ŻŌŚ“ę“¢Ę÷ÖŠ·ÅŗĆ£¬Č·¶Ø³öŹż¾ŻµÄµŲÖ·”£µŚ¶ž“Ī£¬“ÓĒ°µ½ŗó²ÅÄܽ«ĆæøöÖøĮīµÄ²Ł×÷ŹżČ·¶Ø”£æɼūŹż¾ŻĪ»ÖƵÄČ·¶Ø£¬ŅŖĒó¶ŌŹż¾ŻµÄ“ę·ÅĪ»ÖĆ½ųŠŠ±ąÅÅ£¬ĖłŅŌÕūøö·ŅėµÄ¹ż³ĢŹĒ”°±ß±ąÅÅ£¬±ß·Ņė”±£¬Ņņ¶ų½«ÕāŅ»¹ż³Ģ½Š”°±ąŅė”±”£
5.5.4. ³ĢŠņÖ“ŠŠÓÉÓŚÕāĢؼӼõŌĖĖćCPUŹĒŹÖ¶ÆŹäČėµÄ£¬Ņņ“ĖŌŚ²¦¶ÆæŖ¹ŲŹ±±ŲŠėĪ»ÖĆ×¼Č·”£³ĢŠņŗĶŹż¾Ż¶¼ŹäČė“ę“¢Ę÷µÄĻąÓ¦µ„ŌŖŗ󣬾ĶæÉŅŌČĆ¼ĘĖ滜Ą“ŌĖŠŠÕāøö³ĢŠņĮĖ”£
½«”¾Ąż5‑1”æµÄ¾ßĢåµÄÖ“ŠŠ¹ż³ĢĮŠ³É±ķ£¬¾ĶŹĒ±ķ5‑5ĖłŹ¾µÄĒéŠĪ”£
±ķ5‑5 ³ĢŠņÖ“ŠŠĒéæöŅ»ĄĄ
½ŚÅÄ
ÖøĮī | ÖøĮīÖÜĘŚ | |||||
Č”ÖøÖÜĘŚ | Ö“ŠŠÖÜĘŚ | |||||
F | E | D | C | B | A | |
00011011 LDA [3] | PC=0000 |
| PC=0001 |
|
|
|
Lm£¬Ep | Li£¬Er | Cp | Lm£¬Ei | La£¬Er |
| |
PC”śMAR | ROM”śIR | PC+1 | IR”śMAR | ROM”śA |
| |
00101100 ADD [2] | PC=0001 |
| PC=0010 |
|
|
|
Lm£¬Ep | Li£¬Er | Cp | Lm£¬Ei | Lb£¬Er | La£¬Eu | |
PC”śMAR | ROM”śIR | PC+1 | IR”śMAR | ROM”śB | A+B”śA | |
00101101 ADD [1] | PC=0010 |
| PC=0011 |
|
|
|
Lm£¬Ep | Li£¬Er | Cp | Lm£¬Ei | Lb£¬Er | La£¬Eu | |
PC”śMAR | ROM”śIR | PC+1 | IR”śMAR | ROM”śB | A+B”śA | |
00111110 SUB [4] | PC=0011 |
| PC=0100 |
|
|
|
Lm£¬Ep | Li£¬Er | Cp | Lm£¬Ei | Lb£¬Er | Su£¬La£¬Eu | |
PC”śMAR | ROM”śIR | PC+1 | IR”śMAR | ROM”śB | A-B”śA | |
1000 OUT | PC=0100 |
| PC=0101 |
|
|
|
Lm£¬Ep | Li£¬Er | Cp | Ea£¬Lo |
|
| |
PC”śMAR | ROM”śIR | PC+1 | A”śO |
|
| |
1111 STP | PC=0101 |
|
|
|
|
|
Lm£¬Ep | Li£¬Er |
|
|
|
| |
PC”śMAR | ROM”śIR |
|
|
|
| |
https://blog.sciencenet.cn/blog-340399-817407.html
ÉĻŅ»ĘŖ£ŗ½ŖĄĻŹ¦“ųÄćÉč¼ĘCPUÖ®9
ĻĀŅ»ĘŖ£ŗ½ŖĄĻŹ¦“ųÄćÉč¼ĘCPUÖ®11