博文
六自由度并联机构——四面体型六自由度并联机构
|||
我们可以用八面体构造六自由并联机构,那么用四面体(tetrahedron)可不可以呢?答案是肯定的。
从检索到的文献来看,最早可见于蔡[1,2]的工作。他用四面体的六条边当做支腿构造并联机构,这种机构有非常好的性质,就是很容易达到局部完全各向同性,而这对于标准六自由度并联机构(八面体型六自由度并联机构,暂且这么叫吧,方便对比)是不可能的。这很容易理解,四面体底面上的各边上的三条支腿,处于同一水平面,不会产生垂直底面上的力;而四面体侧面的各棱上的支腿,交于一点,不会产生绕底面法向方向的转矩。这一特点,使设计者很容易构造解耦的,甚至于各向同性的并联机构。


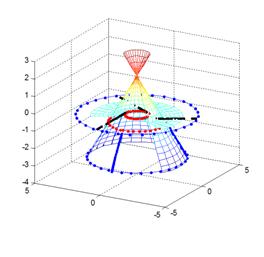
从单叶双曲面的角度,如何对以上构造方法进行理解呢?如果,我们可以把锥理解为喉部直径为零的单叶双曲面,并且把中间有孔的平面理解为线列中的母线与旋转轴垂直的退化的单叶双曲面,那么,我们同样可以在这两个单叶双曲面上各选择三条线,作为支腿[3]。我们是不是很容易找到六条旋转对称的母线,构成一个四面体啊!显然,基于此,我们还可以扩展构成冗余驱动的并联机构。
这种基于圆锥和平面的构造方法,C.S. Ukidve, J. E. McInroy和 F. Jafari[4]等学者似乎也用过,他们在研究具有容错功能的正交并联机构中给出了非常类似的机构。但文中未提及设计的思路。
[1] KY Tsai, TK Lee, 6-DOF isotropic parallel manipulators with three PPSR or PRPS chains 12th IFToMM World Congress, Besançon (France), June18-21, 2007.
[2] KY Tsai, TK Lee, YS Jang, A new class of isotropic generators for developing 6-DOF isotropic manipulators. Robotica 2008, 26:0505, 619-625.
[3]Hongzhou Jiang, Jingfeng He, Zhizhong Tong, Dynamic isotropy design of modified Gough-Stewart platforms lying on a pair of circular hyperboloids, Mechanism and Machine Theory(to be published, DOI:10.1016/j.mechmachtheory.2011.04.003 )
https://blog.sciencenet.cn/blog-333510-431171.html
上一篇:爬出泥潭
下一篇:这根小木棒上的纹路是怎么形成的?