博文
- 有“问题”的项目才是好项目——第一次调试六自由度运动系统记
- 热度 1
- 虽然我曾经参加过多项科研项目,但至今仍然对2002年第一次调试六自由度运动系统的经历记忆犹新。第一次调试, 难免遇到各种困难。困难就像一团乱麻,让人难以捉摸,心情烦躁,但细心的人终于能够从错综复杂的局面中,慢慢理出头绪。 我们在系统调试的实践中成长,在解决困难的过程中逐渐成熟。那次调试,有失败的教训, ...

- 六自由度并联机构——冗余支腿对柔顺中心位置的影响
-
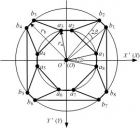
我们在这里讨论冗余支腿对标准六自由度并联机构柔顺中心位置的影响。 中位时,标准六自由度并联机构(如图1所示),存在着柔顺中心(解耦中心)【1】。其位于 , &n ...
- 六自由度并联机构——Ixx=Iyy, Izz=4Ixx这是真的吗?
- 我们在研究标准六自由度并联机构完全动态各向同性【1】时,曾经得到这样两个条件: , ...
- 六自由度并联机构——雅克比阵的参数化方法
- 一直以来,雅克比阵在六自由度并联机构的设计中具有特殊的地位,因此,如何对其雅克比阵进行参数化就得到了许多学者的特别关注。 正如Yi, McInroy和 Jafari 【1】所指出的那样,针对六自由度并联机 ...
- 六自由度并联机构——Simulink正解程序(牛顿拉夫森方法)
- 六自由度并联机构(Stewart Platform)的正解研究曾是该领域的一个热点问题,包括解析解和数值解。这两个问题都已经解决了。对于工程应用来说,数值解法更实用。正解的数值解法一般采用Newton-Raphson方法,文献 中对其收敛性,初值问题,收敛速度有非常详细的证明。 ...
- 六自由度并联机构——四面体型六自由度并联机构
-
我们可以用八面体构造六自由并联机构,那么用四面体( tetrahedron )可不可以呢?答案是肯定的。 从检索到的文献来看,最早可见于蔡 的工作。他用四面体的六条边当做支腿构造并联机构,这种机构有非常好的性质,就是很容易达到局部完全各向同性,而这对于标准六自 ...

- 一篇六自由度并联机构方面的重要文献
- 前几天,在中国知网上查找关于六自由度并联机构或六自由度并联机器人方面的文献。把查到的文章按引用率进行排序,发现黄田教授和汪劲松教授撰写的一篇名为《 Stewart 并联机构人局部灵活度与各向同性条件解析 》的文章,引用率颇高。因为最近自己正在做六自由度并联机构动态各向同性方面的研究,所以对这篇文章非 ...
- 六自由度并联机构——局部与全局各向同性的讨论
- 对于六自由度并联机构,从实用的角度来看,仅仅研究机构的局部性质(工作空间中的某个点)是不够的,必须关注其全局(整个工作空间)特性。但从研究的技术路线来看,我们必须遵从从简单到复杂,从特殊到一般,从局部到全局这样的研究规律。因此,若想得到机构全局的性质,必须以研究局部性质为出 ...
本页有 1 篇博文因作者的隐私设置或未通过审核而隐藏