博文
平行系统方法在自动化集装箱码头中的应用研究
|
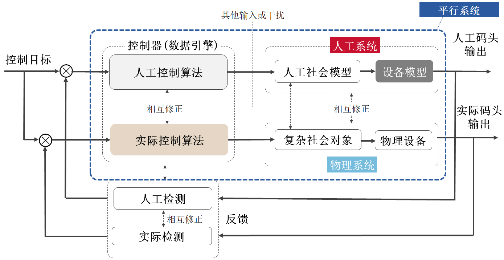
平行码头是指由“物理码头”和“人工码头”组成的一种双闭环控制系统。它的工作原理是通过比较两者的输出误差,并进行连续的计算实验,从而调整或改变物理系统,使其输出满足特定的要求。采用数据引擎作为平行码头的基本计算环境,可以满足平行系统虚实互动的计算要求。再结合多代理软件方法的应用,即可建立分布式的码头系统。在这里,数据引擎的可视化与可动态重构特性对于平行系统的计算实验而言极其重要,也有助于降低码头信息控制系统开发、部署和运维的成本。
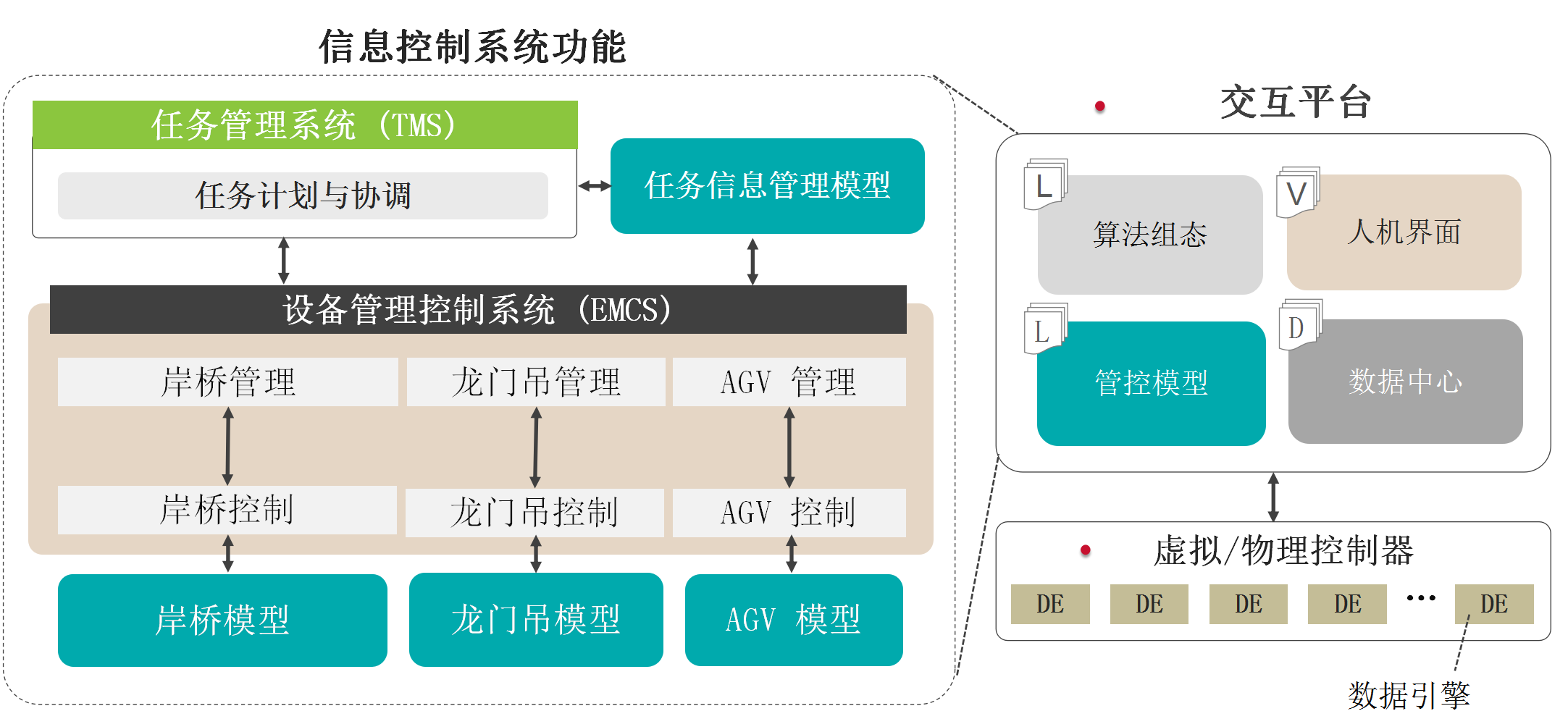
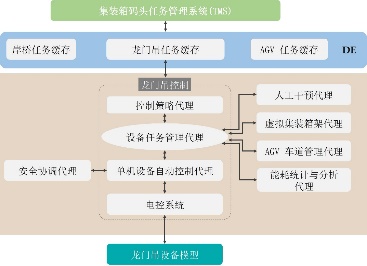
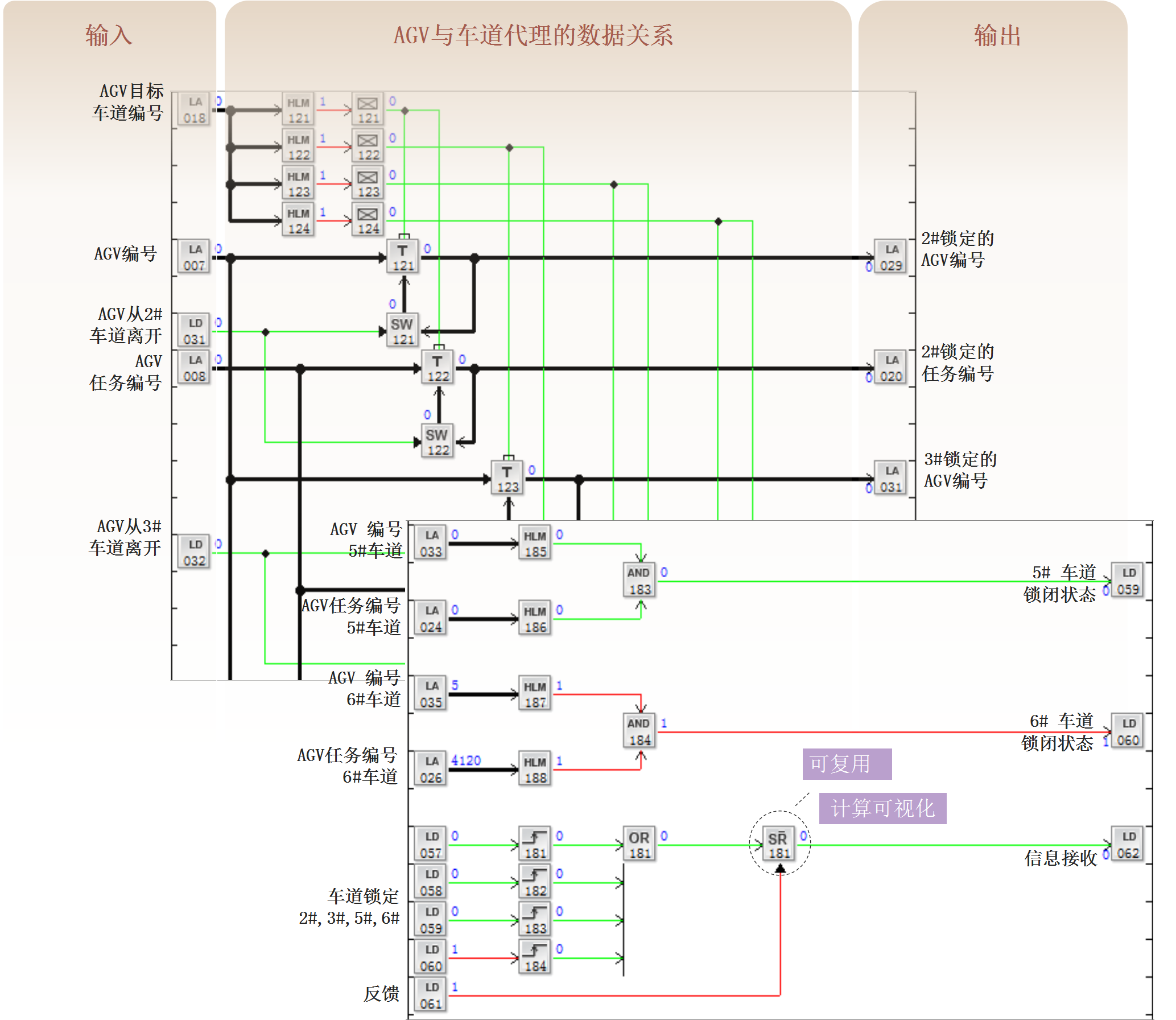
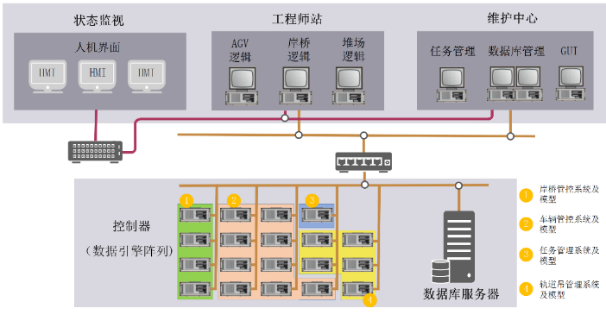
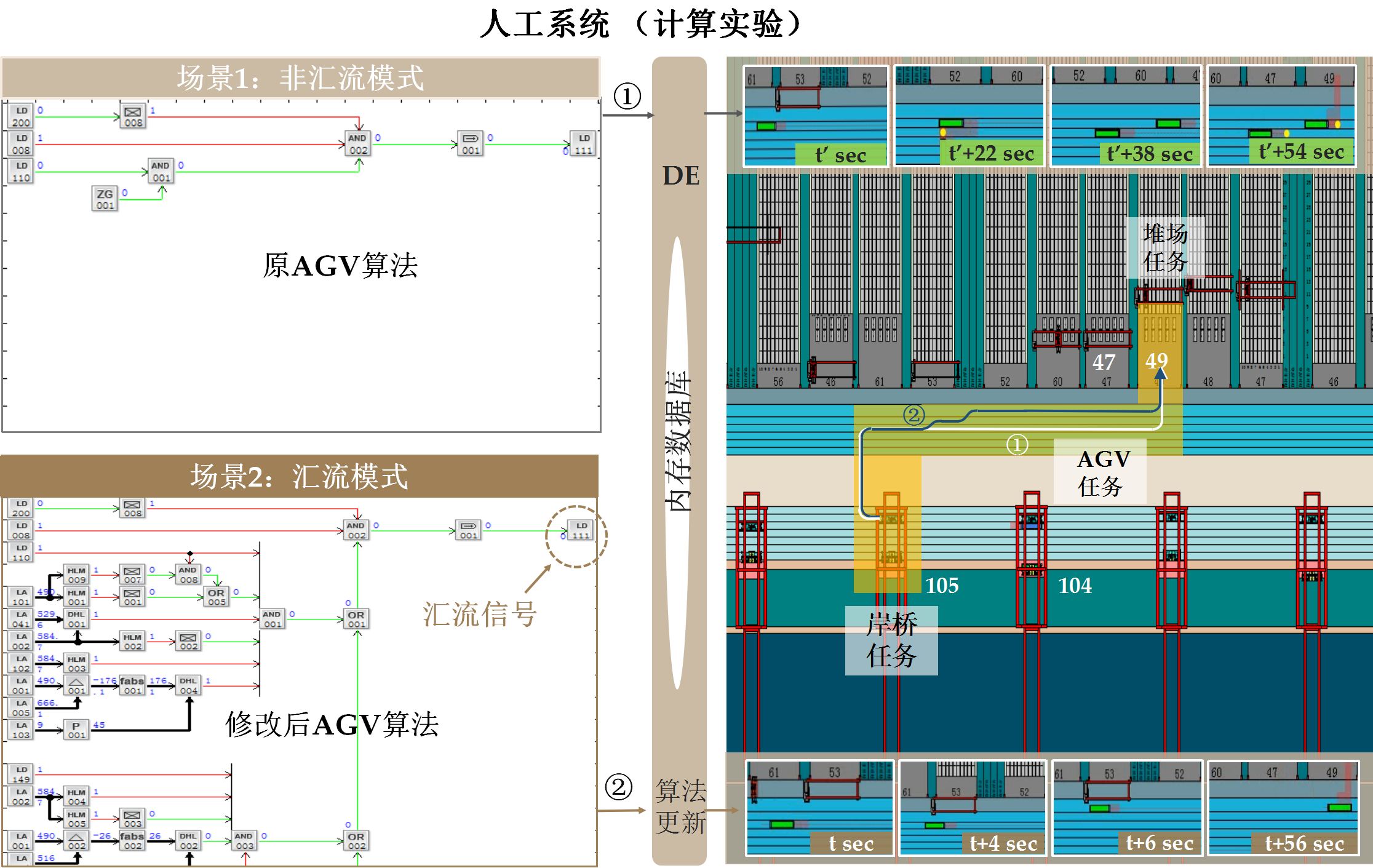
自动化集装箱码头 现有集装箱码头信息控制系统计算环境结构非常复杂,各子系统之间耦合性强,系统设计、开发和运维的成本很高,这很大程度上抵消了自动化作业效率提升所带来的效益。平行系统理论为改变这一状况提供了有效的方法,但在工程实现中我们却面临很多困难,主要原因有两个: 1)平行系统理论的主要应用场合是未知的且复杂的物理系统,其中信息控制部分的软件设计、开发、部署、调试和管理等过程工作量很大,并且需要反复迭代,成本极高。 2)考虑到物理系统的约束,若要实现平行控制的目标,就必须平衡物理系统和人工系统计算环境的差异所带来的一系列问题,例如如何利用人工系统实验结果去调整、优化物理系统。 平行码头的架构 针对以上问题,提出了一种基于数据引擎的平行集装箱码头信息控制系统的体系架构,并设计了该系统的计算环境,以适应平行系统计算实验的需求。在物理码头与人工码头并行工作的状态下,计算实验可用于验证人工码头的设备模型,以及物理码头的控制功能和性能是否能够逼近人工码头的状态。当出现设备模型与物理设备状态偏差大,或平行系统中控制功能和性能之间的偏差大情况时,可以利用平行控制中的修正机制进行调整。平行的两类控制器和设备模型均采用数据引擎计算环境,这是本课题研究的关键。为此,可利用数据引擎的可视化计算特性完成平行码头中相关偏差的检测,并利用动态重构功能对相应的控制算法或设备模型进行在线修正。这种检测和修正工作均由数据引擎的组态软件工具来完成。在平行的两类控制器中,均采用数据引擎作为计算环境,而数据引擎又具有可跨硬件环境的特性,所以人工控制器可以采用低值的计算设备而不会影响到计算实验和平行执行的效果。 平行码头信息控制系统功能示意图 从控制算法编程过程来看,平行码头信息控制系统的功能设计十分复杂,既要处理设备调度和自动控制的任务,又要满足计划管理事务的需求。这两块任务分别由码头任务管理系统和设备管理控制系统来完成。如此复杂的功能设计,需要引入新的方法。 数据引擎提供了这样一种新方法。它让每一项任务的功能都可以通过不同的服务代理组合及其相互通信来实现。组态元件是这项技术的重要特点,可以有效提升人工码头与物理码头之间软件技术资源的复用率。数据引擎可以在完全不相干的代理服务中同时引用相同的组态元件。这就是元件复用性的作用。在这过程中不需要进行任何软件代码的开发,只需要通过拖拽相应的模块即可完成特定的代理服务的算法组态。 平行码头的信息控制过程涉及管理、控制和设备三类代理协同工作。尽管作业过程中存在大量的、面向不同任务需求的信息处理和设备控制过程,但是其中算法与模型的实现环境及方法是完全一致的,都是借助元件组态的方式来编程。研究表明,构建一个中型港口码头信息控制系统所需要的组态元件数量大约需要50万个左右。这些算法及模型均被提交到数百个数据引擎构成的平行计算环境中运行。 “人工码头”中的管理或控制算法的组态程序可以通过连续的计算试验来进行优化,在达到预期效果后又可直接转载到物理码头设备中运行。人们可以借助数据引擎的虚拟计算环境,在平行空间内进行大量计算实验,然后结合运行效率或能耗等优化指标,确定最优的设计方案来指导“物理码头”的高效运行。 龙门吊多代理系统应用实例 AGV代理与车道代理的动态交互应用实例 为了验证平行码头理论方法的有效性,开发了一个与“物理码头”业务过程一致的 “人工码头”。设计了两组计算实验。一组以堆场、AGV和岸桥为研究对象,研究了自动化集装箱码头的全流程卸船作业,用于验证数据引擎技术在复杂的集装箱码头信息控制系统中应用的可行性。另一组以2个自动化堆场、2台岸桥和8台AGV为研究对象,观察“人工码头”动态部署和优化控制策略,最终用于修正“物理码头”的管理和控制。同时也进一步探讨了平行码头技术在自动化集装箱码头工程应用上可行性。 平行码头系统设计 本文主要贡献: 1)针对自动化集装箱码头信息和管理系统设计和开发的复杂性,提出了平行码头的概念和理论方法。 2)针对平行码头虚实互动的技术要求,提出以数据引擎作为“人工码头”和“物理码头”两类控制器的计算环境的设计思想。 3)面对自动化集装箱码头系统复杂的功能结构,采用多代理软件方法开发“人工码头”的系统模型,有效降低了集装箱码头信息控制系统设计、开发和部署的难度与成本。 4)设计了两组计算实验,验证了数据引擎作为平行码头计算环境的科学性,及其在算法优化方面的可重构性。同时给出了平行码头理论方法在自动化集装箱码头信息控制系统中的应用示例。 平行码头计算实验 本文针对如何降低自动化集装箱码头信息控制系统的复杂性问题进行了研究。提出了一种基于数据引擎的平行码头概念、架构和方法来设计自动化集装箱码头的信息控制系统,包括码头任务的规划、调度以及设备的建模和控制。研究结果表明,以数据引擎为计算环境的平行码头在理论和工程层面上都是可行的。平行码头中的“人工码头”与“物理码头”的信息控制系统采用完全相同的图形组态方法与多代理结构,且具有可视化和可动态重构的在线优化特性,对于提高集装箱码头自动化系统设计和开发效率,降低成本有着重要意义。平行码头的理论方法目前已经得到初步应用,如何改善 “人工码头” 与“ 物理码头”的自适应程度,以及如何应用人工智能与大数据设计出更加灵活的云虚实交互机制,以实现真正的 “无人码头”, 是我们要进一步研究的问题。 引用格式:郑松, 吴晓林, 王飞跃, 林东东, 郑蓉, 柯伟林, 池新栋, 陈德旺. 平行系统方法在自动化集装箱码头中的应用研究[J]. 自动化学报, 2019, 45(3): 490-504 文章链接:http://www.aas.net.cn/cn/article/doi/10.16383/j.aas.c170734 作者简介 郑 松 福州大学电气工程与自动化学院研究员。主要研究方向为复杂系统, 工业互联网, 云控制, 机器人和工业信息安全. 本文通信作者. E-mail: s.zheng@fzu.edu.cn 吴晓林 爱普 (福建) 科技有限公司自动化集装箱码头控制系统实验室主任。主要研究方向为复杂系统, 多代理系统和自动控制。 E-mail: xiaolin.wu@iapcloud.cn 王飞跃 中国科学院自动化研究所复杂系统管理与控制国家重点实验室主任, 国防科技大学军事计算实验与平行系统技术研究中心主任, 中国科学院大学中国经济与社会安全研究中心主任, 青岛智能产业技术研究院院长. 主要研究方向为平行系统的方法与应用, 社会计算, 平行智能以及知识自动化. E-mail: feiyue.wang@ia.ac.cn 林东东 爱普 (福建) 科技有限公司自动化集装箱码头控制系统实验室工程师。主要研究方向为AGV 协同控制和智能算法. E-mail: dongdong.lin@iapcloud.cn 郑 蓉 爱普 (福建) 科技有限公司先进控制实验室助理研究员.主要研究方向为智能生活, 机器人和复杂系统. E-mail: rzheng2017@163.com 柯伟林 爱普 (福建) 科技有限公司自动化集装箱码头控制系统实验室工程师.主要研究方向为堆场自动化控制及集装箱库存管理. E-mail: weilin.ke@iapcloud.cn 池新栋 福州大学电气工程与自动化学院研究生.主要研究方向为复杂系统控制以及多代理架构在集装箱码头的应用. E-mail: 13140163697@163.com 陈德旺 福州大学数学与计算机科学学院教授.主要研究方向为智能控制, 机器学习和智能交通系统. E-mail: dwchen@fzu.edu.cn
https://blog.sciencenet.cn/blog-3291369-1255092.html
上一篇:基于一致性敏感哈希块匹配的HDR图像去伪影融合方法
下一篇:L2损失大规模线性非平行支持向量顺序回归模型