博文
变参考轨迹下的鲁棒迭代学习模型预测控制
|
迭代学习模型预测控制(Model Predictive Iterative Learning Control,MPILC)是针对间歇过程的先进控制方法。它能通过迭代高精度跟踪给定参考轨迹,并保证时域上的闭环稳定性。然而,现有的迭代学习模型预测控制算法大多基于线性/线性化系统,且没有考虑参考轨迹变化的情况。
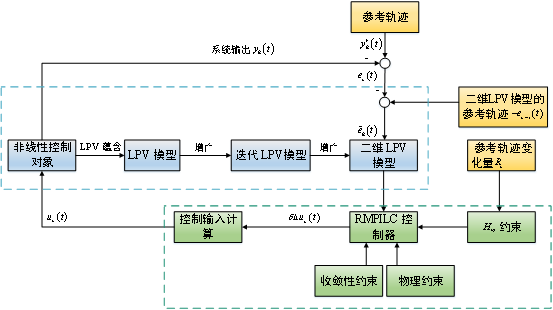
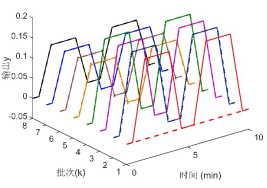
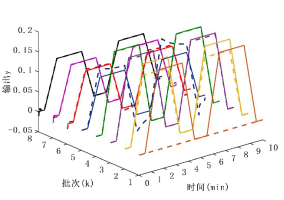
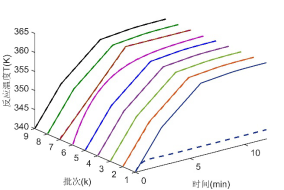
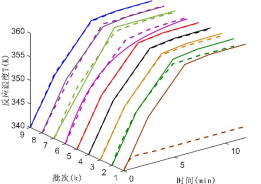
迭代学习模型预测控制发展至今,仍存在一些亟待解决的问题: 1)已有的算法多针对线性定常系统,而实际对象通常具有复杂非线性,采用简单的操作点线性化方法会影响控制性能(延长学习过程,降低跟踪精度); 2)已有的算法通常假设参考轨迹保持不变,但是实际中参考轨迹通常是通过上层优化得到,它会由于生产要求、外部环境等而发生变化,比如同一生产线可能需要生产不同规格的零部件; 3)MPILC算法需要考虑时域稳定性和迭代收敛性,在已有算法中,对同时满足这两点要求的研究较少。 工业上典型的间歇过程 本文提出的鲁棒迭代学习模型预测控制(Robust Model Predictive Iterative Learning Control, RMPILC)针对非线性间歇过程变参考轨迹跟踪问题,首先采用线性参变(Linear Parameter Varying, LPV)模型准确涵盖原始非线性系统的动态特性。然后将鲁棒H∞控制与传统迭代学习模型预测控制相结合,抑制变参考轨迹带来的跟踪误差波动,通过优化线性矩阵不等式约束下的目标函数求得控制输入。其鲁棒稳定性和迭代收敛性都可以通过不等式条件得到保证。 鲁棒迭代学习模型预测控制框图 通过对数值系统和连续搅拌反应釜(Continuous Stirred Tank Reactor,CSTR)系统的仿真,验证了RMPILC算法跟踪变参考轨迹的能力明显优于传统MPILC。 数值系统RMPILC跟踪曲线 数值系统传统MPILC跟踪曲线 CSTR系统RMPILC跟踪曲线 CSTR系统传统MPILC跟踪曲线 本文所构建的RMPILC算法能及时适应参考轨迹变化,提高控制系统在迭代域和时域的鲁棒性,对具有“多重时变”特性的间歇过程具有较强应用价值,有利于提高生产效率及产品质量。 引用格式:马乐乐, 刘向杰. 变参考轨迹下的鲁棒迭代学习模型预测控制. 自动化学报, 2019, 45(10): 1933-1945. 链接:http://www.aas.net.cn/cn/article/doi/10.16383/j.aas.c180681 作者简介 马乐乐, 华北电力大学控制与计算机工程学院博士研究生. 2016年获得华北电力大学自动化专业学士学位. 主要研究方向为预测控制及其应用. E-mail: 1172127008@ncepu.edu.cn 刘向杰,华北电力大学控制与计算机工程学院教授. 1989年获得东北大学工业电气自动化专业学士学位. 1997年获得东北大学自动化研究中心博士学位. 主要研究方向为先进控制策略在电力过程控制中的应用. 本文通信作者. E-mail: liuxj@ncepu.edu.cn



https://blog.sciencenet.cn/blog-3291369-1210578.html
上一篇:《自动化学报》多名编委荣获“杨嘉墀科技奖”等奖项
下一篇:IEEE/CAA Journal of Automatica Sinica被SCI收录
全部作者的精选博文
全部作者的其他最新博文
全部精选博文导读
相关博文
- • AAA PCI -- 学者心声(Authorea 预印论文报道)
- • Building a DIKWP-TRIZ Software System (初学者版)
- • DIKWP-TRIZ: Semantic Blockchain and Semantic Communica(初学者版)
- • DIKWP-TRIZ in 3-No Problem and Artificial Consciousnes(初学者版)
- • Comparison Between DIKWP-TRIZ and TRIZ(初学者版)
- • DIKWP-TRIZ: Enpower AI/AC Innovation (初学者版)