博文
中科院自动化所喻俊志,谭民研究员等:冰雪运动生物力学及其机器人研究进展
|
随着我国冰雪运动的蓬勃发展和2022年北京冬季奥运会的成功申办,冰雪运动生物力学和冰雪机器人的研究越来越受关注.首先,介绍冰雪环境下摩擦力学的基本理论,进一步,对比不同变量对摩擦系数的影响;其次,讨论冰雪运动中空气阻力的成因,并分析潜在的减阻机制;再次,介绍研究中常用的测量手段和不同维度的建模方法,阐明各类手段和方法的优缺点;最后,回顾冰雪机器人的研究进展,分析冰雪机器人研究领域的技术挑战,展望冰雪机器人未来的研究思路.
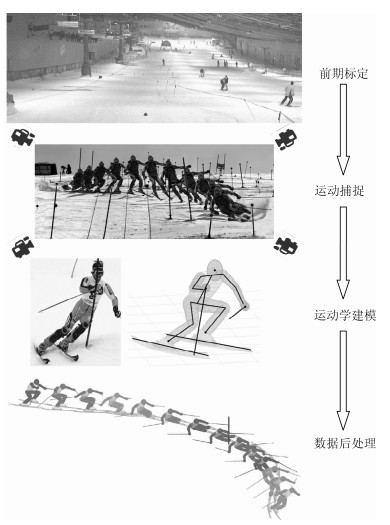
基于视频的三维运动学重建的过程
随着2022年北京冬季奥运会申办成功,我国冰雪运动呈现蓬勃发展的态势。冰雪运动生物力学通过研究人体参加冰雪运动的力学规律,能揭示出冰雪运动发生的内在机制,建立正确的技术模式,从而为运动员技术诊断和训练改进提供理论依据。

冰雪运动生物力学研究及典型冰雪机器人一览
本文首先回顾了冰雪环境下的三种摩擦理论, 然后概述了冰雪运动中空气阻力的形成因素, 并从形阻、运动学因素和表面阻力三个方面探讨了减阻机制.接着按照运动学数据和动力学数据总结了冰雪运动生物力学中常见的测量手段.在此基础上, 介绍了数学建模的研究现状, 这一方面的研究较为丰富, 模型从一维到三维, 针对场景从滑雪到滑冰都有所涉猎.本文最后综述了冰雪机器人的研究现状, 并对其中的关键技术问题作了分析, 讨论了可能的研究方向.
多年以来, 以人为研究对象的冰雪运动生物力学在减阻测量和建模等方面积累了大量成果, 反观冰雪环境下的双足机器人研究一直处于一个相对空白状态, 与普通双足机器人快速发展形成鲜明对比.借助于冰雪运动生物力学的研究方法和既有结论, 可以深入探索类人机器人在高速、高机动状态下的环境感知、路径规划、运动控制等机理, 评估其稳定性、鲁棒性、泛化性, 这些都是普通类人机器人平台难以实现的.此外, 冰雪机器人的研究不仅促进冰雪运动的发展, 顺应了冰雪运动在我国正越来越受关注的趋势, 而且为极端冰雪条件下机器人的任务执行(如科学考察、军事作战等)提供基础理论与技术支撑, 助力极地强国建设.
引用格式:王天柱, 吴正兴, 喻俊志, 谭民, 张峰. 冰雪运动生物力学及其机器人研究进展. 自动化学报, 2019, 45(9): 1620-1636.
链接:http://html.rhhz.net/ZDHXBZWB/html/2019-9-1620.htm
作者简介
王天柱,中国科学院自动化研究所博士研究生。2015年获得北京交通大学电信学院自动化专业学士学位。主要研究方向为仿生机器人,水下机器人和智能控制系统。
E-mail: wangtianzhu2015@ia.ac.cn
吴正兴,中国科学院自动化研究所复杂系统管理与控制国家重点实验室副研究员。主要研究方向为仿生机器人和智能控制系统。
E-mail: zhengxing.wu@ia.ac.cn
喻俊志,中国科学院自动化研究所复杂系统管理与控制国家重点实验室研究员。主要研究方向为仿生机器人,多机器人系统,智能信息处理。本文通信作者。
E-mail: junzhi.yu@ia.ac.cn
谭民,中国科学院自动化研究所复杂系统管理与控制国家重点实验室研究员。主要研究方向为机器人系统,智能控制系统。
E-mail: min.tan@ia.ac.cn
张峰,中国科学院自动化研究所高级工程师。2003年获北京理工大学机械电子工程专业硕士学位。主要研究方向为人工智能,智能处理器及隔离器件。
E-mail: zhangfeng@ia.ac.cn
https://blog.sciencenet.cn/blog-3291369-1201864.html
上一篇:自动化学报和IEEE/CAA JAS两刊编委获得2019年度国家自然科学基金项目
下一篇:JAS带您看IFAC Fellow最新发文