博文
[转载]前沿 | “自动驾驶技术与应用” 专刊上线!
|||
图2上路了,为无人车打前站。欢迎阅读《图图》的自动驾驶专刊,感谢云泉、曹、鲍、陈、贾、田六位老师大力支持,更感谢各位作者和评委及编辑部的奉献😄😄
前沿 | “自动驾驶技术与应用” 专刊上线!

为了促进我国自动驾驶领域相关技术、方法与应用研究的深入开展,及时反映我国学者的最新研究进展,《中国图象图形学报》邀请业内专家共同策划推出:
“自动驾驶技术与应用”专刊

扫码关注,回复“自动驾驶”
免费获取专刊论文电子版



专刊论文:
“自动驾驶技术与应用”专刊共收录学术论文20篇,包括:
5篇综述;
2篇平行驾驶论文;
7篇目标检测与跟踪论文;
4篇自动驾驶场景感知与仿真论文;
2篇高精地图构建与SLAM论文。
专刊序言
自动驾驶技术作为未来汽车发展的重要前沿方向,涵盖了自动控制、计算机科学、通信技术、人工智能和车辆工程等技术领域,可以有效减少因驾驶员疲劳和失误而造成的交通事故,同时在缓解交通拥堵、提高交通效率、降低能耗等方面拥有巨大潜能。因此,自动驾驶技术与应用成为各国的研发热点。2009年至2020年,国家自然科学基金委连续举办了十二届“中国智能车未来挑战赛”,该比赛是我国创办最早、持续时间最长的自动驾驶赛事,积极评估和推进智能交通、车联网和无人驾驶领域的技术发展水平。2020年2月,国家发改委、中央网信办、科技部、工信部等十一部门联合印发《智能汽车创新发展战略》,明确指出加快推进智能汽车创新发展。
自动驾驶是一门集环境感知、智能决策、路径规划、车辆控制等众多技术的交叉学科,随着人工智能技术的快速发展,有望推动自动驾驶技术及应用落地的快速变革。目前,自动驾驶围绕货运、物流、矿山、港口、园区等场景的商业应用已取得显著进展,然而,要实现自动化驾驶汽车在公开道路上的大规模应用落地,仍需解决自动驾驶技术中的单车智能缺陷、车路协同的多智能体技术应用困局、L4级(高度自动化)和L5级(完全自动化)的技术瓶颈等问题。
《中国图象图形学报》策划出版的“自动驾驶技术与应用”专刊,邀请业内专家共同组织,收录国内学者在自动驾驶技术与应用领域具有创新性和突破性的研究成果。本期专刊征文得到了所选专题相关研究领域专家和学者的热烈响应,为本专刊提供了丰富的优质稿源,集中反映了研究团队的交叉性、研究主题的广泛性和研究成果的前沿性。本期收录的稿件包括:依据长期科研经验撰写的领域综述;针对最新研究和未来发展撰写的前沿进展,追根溯源、洞察未来;以及来自不同细分邻域的最新探索,提供多元化的科研成果。
我们期待广大读者和科技人员通过本期“自动驾驶技术与应用”专刊,能够更深入、更全面地了解该领域的最新技术和应用,有更多学者参与相关研究,产生具有国际影响力的优秀成果,为领域发展做出新的贡献。
——王飞跃,张云泉
综 述
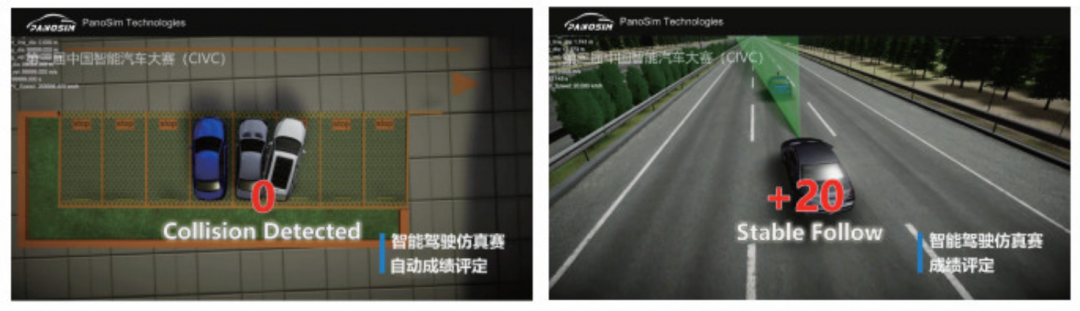
智能驾驶仿真赛的成绩判定
论文标题:面向智能驾驶测试的仿真场景构建技术综述
论文作者:任秉韬,邓伟文,白雪松,李江坤,纵瑞雪,朱冰,丁娟
第一单位:北京航空航天大学交通科学与工程学院
引用格式:
任秉韬, 邓伟文, 白雪松, 李江坤, 纵瑞雪, 朱冰, 丁娟. 2021. 面向智能驾驶测试的仿真场景构建技术综述. 中国图象图形学报, 26(1): 1-12
论文标题:自动驾驶软件测试技术研究综述
论文作者:冯洋,夏志龙,郭安,陈振宇
第一单位:南京大学计算机软件新技术国家重点实验室
引用格式:
冯洋, 夏志龙, 郭安, 陈振宇. 2021. 自动驾驶软件测试技术研究综述. 中国图象图形学报, 26(1): 13-27
论文标题:强化学习的自动驾驶控制技术研究进展
论文作者:潘峰,鲍泓
第一单位:北京化工大学信息科学与技术学院
引用格式:
潘峰, 鲍泓. 2021. 强化学习的自动驾驶控制技术研究进展. 中国图象图形学报, 26(1): 28-35
论文标题:自动驾驶地图的数据标准比较研究
论文作者:詹骄,郭迟,雷婷婷,屈宜琪,吴杭彬,刘经南
第一单位:武汉大学卫星导航定位技术研究中心
引用格式:
詹骄, 郭迟, 雷婷婷, 屈宜琪, 吴杭彬, 刘经南. 2021. 自动驾驶地图的数据标准比较研究. 中国图象图形学报, 26(1): 36-48
论文标题:视觉感知的端到端自动驾驶运动规划综述
论文作者:刘旖菲,胡学敏,陈国文,刘士豪,陈龙
第一单位:湖北大学计算机与信息工程学院
引用格式:
刘旖菲, 胡学敏, 陈国文, 刘士豪, 陈龙. 2021. 视觉感知的端到端自动驾驶运动规划综述. 中国图象图形学报, 26(1): 49-66
平行驾驶
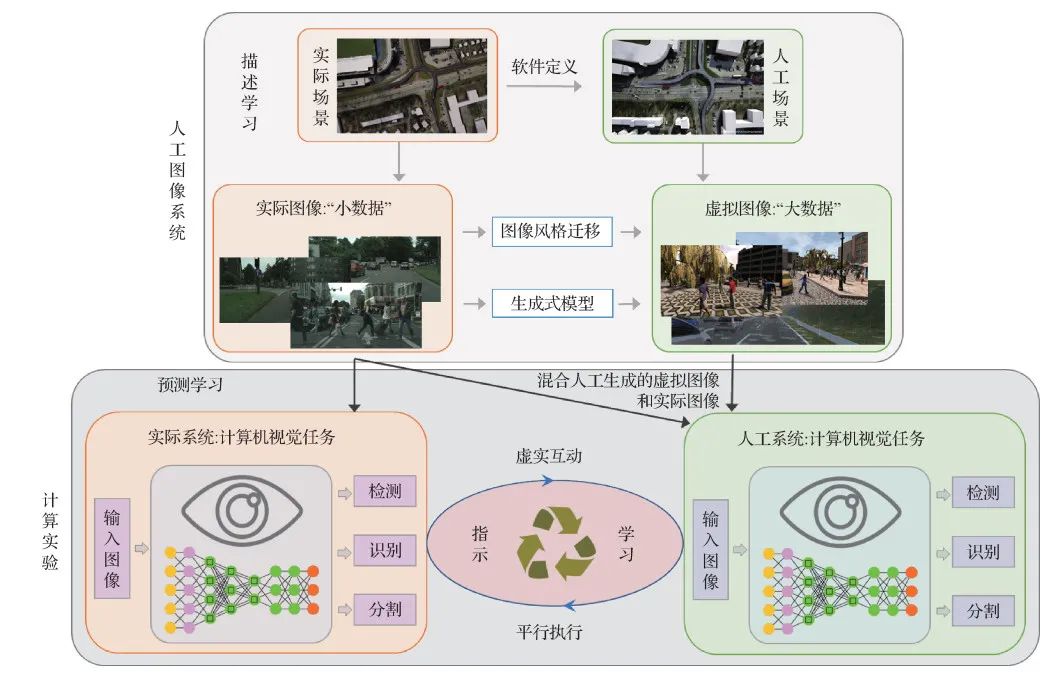
平行视觉分析框架
论文标题:面向智能驾驶的平行视觉感知:基本概念、框架与应用
论文作者:李轩,王飞跃
第一单位:鹏城实验室
引用格式:
李轩, 王飞跃. 2021. 面向智能驾驶的平行视觉感知:基本概念、框架与应用. 中国图象图形学报, 26(1): 67-81
论文标题:平行视觉的基本框架与关键算法
论文作者:张慧,李轩,王飞跃
第一单位:中国科学院自动化研究所复杂系统管理与控制国家重点实验室
引用格式:
张慧, 李轩, 王飞跃. 2021. 平行视觉的基本框架与关键算法. 中国图象图形学报, 26(1): 82-92
目标检测与跟踪
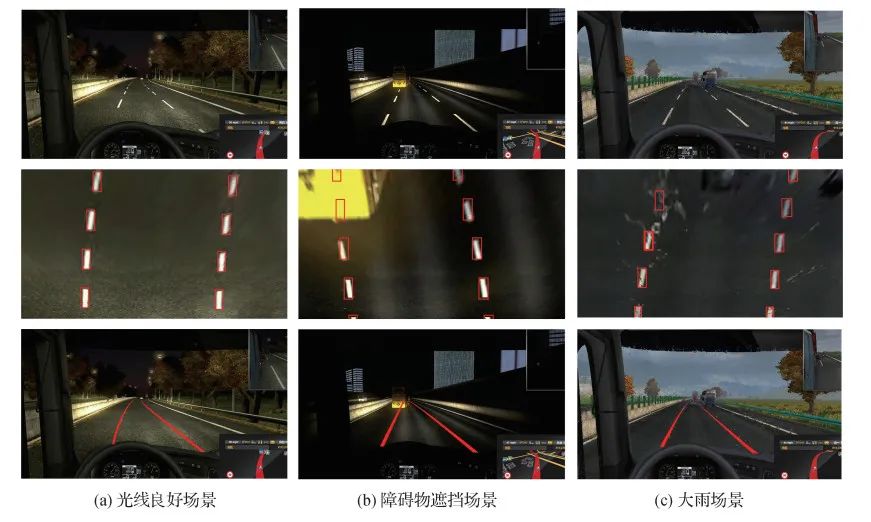
ETS2场景下的车道线检测结果
论文标题:自动驾驶场景的尺度感知实时行人检测
论文作者:徐歆恺,马岩,钱旭,张龑
第一单位:中国矿业大学(北京)
引用格式:
徐歆恺, 马岩, 钱旭, 张龑. 2021. 自动驾驶场景的尺度感知实时行人检测. 中国图象图形学报, 26(1): 93-100
论文标题:实时视觉目标跟踪与视频对象分割多任务框架
论文作者:李瀚,刘坤华,刘嘉杰,张晓晔
第一单位:中山大学数据科学与计算机学院
引用格式:
李瀚, 刘坤华, 刘嘉杰, 张晓晔. 2021. 实时视觉目标跟踪与视频对象分割多任务框架. 中国图象图形学报, 26(1): 101-112
论文标题:提升预测框定位稳定性的视频目标检测
论文作者:郝腾龙,李熙莹
第一单位: 中山大学智能工程学院智能交通研究中心
引用格式:
郝腾龙, 李熙莹. 2021. 提升预测框定位稳定性的视频目标检测. 中国图象图形学报, 26(1): 113-122
论文标题:道路结构特征下的车道线智能检测
论文作者:张翔,唐小林,黄岩军
第一单位:浙江财经大学信息管理与人工智能学院
引用格式:
张翔, 唐小林, 黄岩军. 2021. 道路结构特征下的车道线智能检测. 中国图象图形学报, 26(1): 123-134
论文标题:适用全速域大曲率路径的自动驾驶跟踪算法
论文作者:张龑,郑颖,鲍泓
第一单位:中国矿业大学(北京)机电与信息工程学院
引用格式:
张龑, 郑颖, 鲍泓. 2021. 适用全速域大曲率路径的自动驾驶跟踪算法. 中国图象图形学报, 26(1): 135-142
论文标题:伪3D卷积神经网络与注意力机制结合的疲劳驾驶检测
论文作者:庄员,戚湧
第一单位:南京理工大学计算机科学与工程学院
引用格式:
庄员, 戚湧. 2021. 伪3D卷积神经网络与注意力机制结合的疲劳驾驶检测. 中国图象图形学报, 26(1): 143-153
论文标题:基于眼部自商图—梯度图共生矩阵的疲劳驾驶检测
论文作者:潘剑凯,柳政卿,王秋成
第一单位:浙江工业大学机械工程学院
引用格式:
潘剑凯, 柳政卿, 王秋成. 2021. 基于眼部自商图—梯度图共生矩阵的疲劳驾驶检测. 中国图象图形学报, 26(1): 154-164
自动驾驶场景感知与仿真

真实场景下的训练和测试
论文标题:结合局部平面参数预测的无监督单目图像深度估计
论文作者:周大可,田径,杨欣
第一单位:南京航空航天大学自动化学院
引用格式:
周大可, 田径, 杨欣. 2021. 结合局部平面参数预测的无监督单目图像深度估计. 中国图象图形学报, 26(1): 165-175
论文标题:深度纯追随的拟人化无人驾驶转向控制模型
论文作者:单云霄,黄润辉,何泽,龚志豪,景民,邹雪松
第一单位:中山大学计算机学院
引用格式:
单云霄, 黄润辉, 何泽, 龚志豪, 景民, 邹雪松. 2021. 深度纯追随的拟人化无人驾驶转向控制模型. 中国图象图形学报, 26(1): 176-185
论文标题:Edge-guided GAN:边界信息引导的深度图像修复
论文作者:刘坤华,王雪辉,谢玉婷,胡坚耀
第一单位:中山大学数据科学与计算机学院无人系统研究所
引用格式:
刘坤华, 王雪辉, 谢玉婷, 胡坚耀. 2021. Edge-guided GAN:边界信息引导的深度图像修复. 中国图象图形学报, 26(1): 186-197
论文标题:引入概率分布的深度神经网络贪婪剪枝
论文作者:胡骏,黄启鹏,刘嘉昕,刘威,袁淮,赵宏
第一单位:东北大学计算机科学与工程学院
引用格式:
胡骏, 黄启鹏, 刘嘉昕, 刘威, 袁淮, 赵宏. 2021. 引入概率分布的深度神经网络贪婪剪枝. 中国图象图形学报, 26(1): 198-207
高精地图构建与SLAM

激光雷达SLAM建立的3维地图
论文标题:开放道路中匹配高精度地图的在线相机外参标定
论文作者:廖文龙,赵华卿,严骏驰
第一单位:上海交通大学
引用格式:
廖文龙, 赵华卿, 严骏驰. 2021. 开放道路中匹配高精度地图的在线相机外参标定. 中国图象图形学报, 26(1): 208-217
论文标题:利用边缘计算的多车协同激光雷达SLAM
论文作者:崔明月,钟仕鹏,刘思瑶,李博洋,吴成昊,黄凯
第一单位:中山大学数据科学与计算机学院
引用格式:
崔明月, 钟仕鹏, 刘思瑶, 李博洋, 吴成昊, 黄凯. 2021. 利用边缘计算的多车协同激光雷达SLAM. 中国图象图形学报, 26(1): 218-228
https://blog.sciencenet.cn/blog-2374-1269216.html
上一篇:[转载]996变1023,智能时代竟然这样上班!
下一篇:[转载]2021第四届IEEE国际无人系统大会征文通知