博文
基于人机意图智能融合的平行驾驶技术
|
基于人机意图智能融合的平行驾驶技术
刘腾,要婷婷,于会龙,邢阳,田滨,陈龙,王飞跃
【关键词】平行驾驶 人机意图 平行感知
引用格式 刘腾,要婷婷,于会龙,邢阳,田滨,陈龙,王飞跃, “基于人机意图智能融合的平行驾驶技术”, 中国计算机学会通讯, 2018, Vol. 14, No. 8, pp. 55-63.
研究背景
无人驾驶汽车是未来汽车发展的方向,这是一种将探测、识别、判断、决策、优化、优选、执行、反馈、纠控功能融为一体,集微电脑、微电机、绿色环保动力系统、新型结构材料等顶尖科技成果为一身,会学习、会总结、会提高技能的智慧型汽车, 是先进人工智能技术的最佳应用与验证平台[2]。近年来国内外高校和企业单位对于智能网联无人驾驶技术的研发投入加大[3,4]。为了改善汽车的可操控性, 美国的大学自20 世纪六七十年代以来,经过二十多年对汽车侧向跟踪控制及纵向速度控制进行大量的研究,取得了一系列重要成果。1980 年以后,各国军方及世界上一些大型汽车公司也纷纷加入了对无人驾驶智能车研究设计的队伍。
受国家经济条件的制约,我国对无人驾驶智能车的研究起步较晚,但是通过不懈努力,已经取得了令人鼓舞的成果。国防科技大学[5]、北京理工大学[6]、清华大学[7]、南京理工大学[8]、武汉大学[9]、西安交通大学[10]、中国科学院合肥物质科学研究院[11]、陆军军事交通学院[12] 等高校和研究所对智能车辆技术展开了一系列研究。国家自然科学基金委于2008 年设立了“视听觉信息的认知计算”重大研究计划, 并从2009—2018 年连续举办了十届“中国智能车未来挑战赛”。在专利申请和授权方面,专利技术积累量不多,国内的主要集中在百度公司,涉及的技术领域主要在传感、定位、识别及控制方面。需要指出的是,研发无人驾驶汽车并非要完全替代驾驶员, 只是在一些特定场景下作替代。无人驾驶汽车尤其适合旅游、应急救援、长途高速客货运输、军事等用途,以发挥可靠、安全、便利及高效的性能优势, 减少事故,弥补有人驾驶汽车的不足。
作为平行智能方法的典型应用,平行驾驶是新一代云端化网联的驾驶技术,对我国汽车产业、人机协同混合智能产业的发展具有强有力的支撑作用[1, 2]。复杂驾驶环境下驾驶员行为的不确定性、脆弱性和开放性,是造成交通事故的主因。本文提出了一种基于平行智能的人机意图智能融合的人车协同关键技术研究及应用验证,其研究成果可推广于智能汽车企业、无人挖矿区、物流园区等领域,是提高安全驾驶的重要途径。
ACP理论
在2004 年,中科院自动化所研究员王飞跃提出了平行系统的思想,其核心为构建虚实互动的真实和人工系统来研究复杂系统的控制优化。在平行系统中,所用的技术手段称为ACP 方法。A 是指人工系统(Artificial Systems),即构建与真实系统相似的人工系统;C 是指计算实验(Computational Ex-periments),即利用当前高效、鲁棒的人工智能、机器学习等方法来对构建的不同数学问题进行求解和分析;P 是指平行执行(Parallel Execution),即用人工系统来指导真实系统,同时真实系统也可提升人工系统。
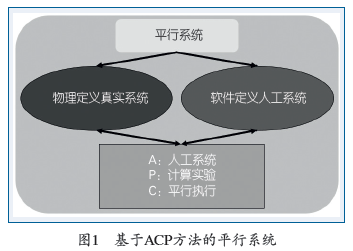
平行系统中 ACP 方法的基本框架如图 1 所示。 在人工系统的构建过程中,需要保证人工系统与真 实系统的一致性,只有在足够准确的模型基础上, 获得虚拟控制和决策才能对真实的系统起到指导作 用。在具体的实施过程中,主要通过描述学习的方 式来对系统进行描绘和构建。同时,模型的精度可 以在平行执行的过程中实时提升。
计算实验是在人工系统和真实系统两个维度中同时进行的,而且具有越来越智能的趋势。计算实验在实际系统主要对过去和当前的数据信息进行处理,获得能够指导实际系统运行的知识;而计算实验在人工系统中则主要体现为通过预测学习和引导学习来获取未来的或者未经历过的知识,从而使得平行系统更加完备。
平行执行则无时无刻不在平行系统中体现,包括人工系统和真实系统之间的数据流、控制流、模型流等等。反馈,是人工系统流向真实系统的描述,通过大量的人工智能、机器学习等算法来获得知识,用以引导真实系统;提升,是真实系统流向人工系统的描绘,实际系统的知识能够更好地反馈当前整个系统的走向和趋势,从而对人工系统的模型进行引导和修改。
平行驾驶技术
平行驾驶是一种兼具运营管理、在线状态监测、应急驾驶安全接管等功能的先进云端化网联自动驾驶集成解决方案。它通过形式化描述自动驾驶车辆的行为和交通环境的特征以构建“信息- 物理- 社会” 的交互驾驶环境(描述车),然后在该环境中进行计算实验以对复杂行车场景和工况(含边缘场景/ 工况)进行试错、优化和预测(预测车),最终通过信息- 物理车辆之间的实时交互以引导物理车辆安全高效地驾驶(引导车)。因此,平行驾驶系统也被称为“自动驾驶数字四胞胎系统”,即物理车、描述车、预测车和引导车的集成系统。与传统的单车自动驾驶和网联自动驾驶相比,平行驾驶的先进性和独特性体现在,通过构建和集成软件定义的“描述车- 预测车- 引导车”系统,大幅度提升驾驶安全和运营效率, 特别适用于矿山、物流等应用场景。
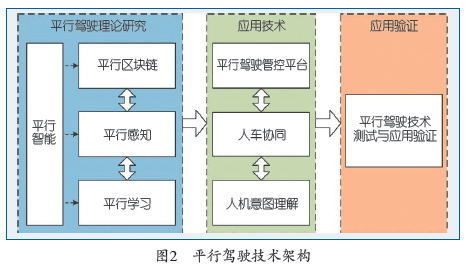
融合人机意图的平行驾驶技术的研究与验证思路如图2 所示。首先,将平行智能理论作为平行驾驶的理论基础,其中的关键技术包括平行区块链、平行感知和平行学习。目前,自动驾驶的行驶离不开人类驾驶员的协作,如何让二者能够和谐地共驾是本文平行驾驶研究的重点。其次,将平行驾驶的关键技术用于研究驾驶员意图理解、人车协同决策、人车协同执行问题,实现自动驾驶过程中人机共驾技术的突破。最后,通过平行测试技术构建虚实平台来验证融合人机意图的平行驾驶。
在具体实施过程中,通过研究平行感知与平行学习技术来直接理解驾驶员的意图。两个关键技术互相影响,互相提升。感知算法的有效运行依赖于可靠的机器学习方法,同时,机器学习也是理解驾驶员意图的手段。平行区块链的研究则是保障传感器的数据安全,通过校正传感器数据以保证感知算法的输入安全可靠。
将“人类驾驶员”引入到自动驾驶回路中,人车协同系统就需要充分考虑人的行为习惯并预测其意图。在人机意图识别的基础上,通过有效的切换控制来实现人车协同共驾。在人工系统和真实系统中同时对提出的多种算法进行测试,以证明其适用性和鲁棒性。
平行学习
平行学习面向复杂数据的机器学习问题,是一种结合平行系统思想和机器学习方法的新型理论框架[13],包括三个阶段。数据处理阶段基于在人工系统中演化和迭代产生的因果关系明确、数据格式规整的人工大数据,训练和更新机器学习模型。行动学习阶段利用计算实验方法进行预测学习、转移学习,并将学习经验作为机器学习的输入,得到应用于某些特定场景或任务的最优对策。其中,一个数据可能产生多个新的对策,即平行学习允许输入数据和完成对策有着完全不同的频次和发生顺序。知识实践阶段将新的对策映射到平行空间中,通过指示学习的方式使其在实际系统与人工系统中平行执行,从而实现通过大量仿真迭代来指导和改善实际行动的目标[14]。
平行学习以平行驾驶中特定任务为研究主体, 首先构建模拟平行驾驶真实动态系统运行的人工场景,确定任务相关的输入/ 输出物理量,如速度、加速度、电池荷电状态(state of charge)、发动机转速、需求功率等。在构建的人工场景中输入具有代表性的真实数据,并通过变换操作环境和系统参数来获取与真实环境有别的仿真数据,保证数据的逻辑和因果的合理性[15]。通过基于CPSS1 的三元协同的数据融合方法(如预测学习或转移学习),来明确平行驾驶任务在不同环境中关键参数的相互作用关系和演化迭代过程。其次,在马尔科夫理论和机器学习框架中,确定平行驾驶任务的状态、控制变量、代价函数和回报函数。结合数据融合方法得到的学习经验,利用数据驱动方法(如神经网络算法) 对数据进行进一步处理,得到与优化目标相关的最优Q 网络[16]。最后,在特定的平行驾驶任务中,基于指示学习理论,利用所得的平行驾驶任务对策对真实动态系统进行指导;基于集成学习理论,利用所得的平行驾驶任务对策对构建的人工系统进行校正,通过平行执行的方式来不断地优化整个平行学习框架,提高模型的性能。
平行感知
平行感知基于平行系统理论,建立在实际场景与人工场景之上,是一种虚实互动的智能感知计算方法[17],包括平行视觉模块与平行多传感器融合模块(见图3)。平行视觉模块旨在解决大规模多样性的复杂场景下视觉感知算法的有效性,以及视觉算法的全面、充分验证问题;平行多传感器融合模块是一种将平行理论应用于多传感器融合问题的技术。自动驾驶系统中多种物理传感器的使用存在成本高、维护难、易失效、难以部署等问题,本文提出的平行多传感器模块为上述问题提供了一个可行的解决方案。
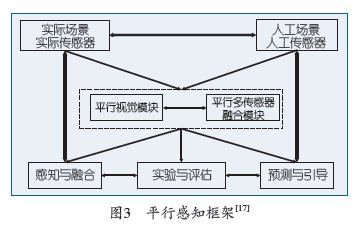
针对自动驾驶中的人机意图理解,首先构建逼近实际场景的人工驾驶员、人工车、人工交通场景, 自动得到精确的标注信息,为平行视觉模块生成大规模多样性的场景与标注数据集[18]。此外,在人工模型中设置多个不同类型的人工传感器,包括视觉传感器、雷达、超声波等,获取驾驶员、车辆、外部环境的感知数据,进一步补充平行视觉模块中的人工场景数据。然后,结合人工场景数据集和实际场景数据集,进行计算实验,研发优化视觉算法[19], 在人工传感器产生的大量冗余数据基础上进行多传感器融合。平行视觉模块主要运用机器学习、领域适应、统计分析等技术设计、优化、评价视觉算法[20]; 平行多传感器模块运用人工神经网络、贝叶斯技术、Dempster2Shafer 证据推理等方法,进行多传感器融合,并且验证融合方法的有效性。与单纯的基于实际场景的实验相比,平行感知的计算实验过程可控、可观、可重复,并且真正地产生“大数据”,用于后续的知识提取和算法优化。最后,人工感知系统与实际感知系统平行执行:运用在线学习、知识自动化等技术使模型训练和评估在线化、长期化,通过与人工之间的虚实互动和人机混合,持续优化平行视觉模块[21] ;人工系统可以输入实际系统的传感器数据,进行多传感器融合方法验证和预测,同时指导和校正实际系统的多传感器融合方法,最终优化平行多传感器融合模块的性能。
平行区块链
平行区块链是平行智能理论方法与区块链技术的有机结合,可以解决平行感知部分多传感器数据的校验及安全问题[22]。具体研究内容包括:区块链驱动的多智能体共识机制与去中心化信任,以及基于智能合约的计算实验与平行决策。
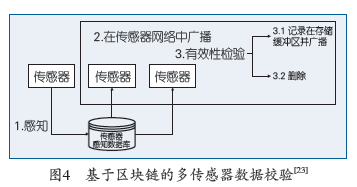
基于ACP 方法,建立平行区块链[23]。首先, 基于多智能体(agent) 方法对智能传感器及其构成的区块链 P2P网络进行人工建模,并建立与之“ 等价” 的虚拟传感器及虚拟区块链。然后,针对虚拟区块链进行基于智能合约的计算实验,以可编程的智能合约实现复杂场景与复杂传感器的行为,计算虚拟区块链系统在不同场景(传感器故障、网络延迟、黑客攻击等)、不同参数配置(如节点个数、区块大小、区块平均生成时长、各类共识算法)下的运行效果并进行评估,作为选择和支持最优决策的依据。在计算实验中,将先进的人工智能方法融入已有的涌现方法2 及其他计算方法中。最后,通过虚拟区块链和实际区块链的互动反馈形成对实际区块链的管理与控制[24]。通过构建多传感器的区块链P2P 网络,建立区块链驱动的多传感器共识机制与去中心化信任。以传感器作为区块链节点,参与到数据校验与记账中。如图4 所示,当某个传感器感知到数据时,将数据在P2P 网络中进行广播,它的相邻节点收到后对数据进行有效性校验,只有通过半数节点验证的数据才能被保留。
驾驶员意图理解
驾驶意图是在驾驶过程中形成的,与行驶环境及车辆状态相关,并决定后续驾驶行为动作实施的自我内心状态。但驾驶意图在驾驶过程中难以直接获取,只能依靠驾驶过程中驾驶员的动作与姿态、车辆状态、车外环境等间接信息进行推测和预估。其时序特性可简单归纳为:驾驶员受到外部交通环境的刺激而产生改变当前行驶状态的初步意图。根据该初步意图,驾驶员需要观察相应方向的行车信息来确保是否可以执行该意图。当行车环境安全时, 驾驶意图可以被执行,驾驶员通过手、脚对车辆进行控制来实现该意图。相反,当周围行车环境复杂且不适合改变当前行驶状态时,该行驶意图将会被取消。基于此,对驾驶员意图的识别需要根据来自驾驶员、车辆、外部环境等多传感器感知来实现。
针对驾驶员意图识别,常用的传感器可分为三类:车辆本身状态传感器、驾驶员状态传感器和车外高级驾驶员辅助系统(ADAS) 传感器。当驾驶员按正常速度行驶,并且车辆周围交通环境良好且无其他车辆时,驾驶员产生诸如换道或减速意图的可能性很小,因此,周围行车环境是评估驾驶员意图的重要指标,也是驾驶员意图产生的直接刺激因素。
对于人机交互和意图识别中最重要的驾驶员行为特征,如头部朝向及视线方向,是反映真实驾驶意图的重要标志。驾驶员必须仔细观察周围行驶环境来确定是否可以改变当前行驶状态并对车辆进行控制。因此,针对驾驶员行为特征的检测是人机交互和内在意图识别的重点。通过机器学习和深度学习的方法,建立可以高效识别并精确预测的驾驶员意图模型。同时,利用视觉传感器检测驾驶员行为运动特征,进行图像信息提取与处理,应用计算机视觉技术感知驾驶员行为状态,实时监控判断驾驶员行为状态,接收汽车失稳信号,判别车辆是否进入复杂驾驶工况,明确基于驾驶员状态的复杂工况边界与复杂工况进入/ 切出条件。
驾驶员在行驶过程中可能因为各种与驾驶无关的竞争性活动(如使用智能手机、观看导航系统等) 或是驾驶员本身的健康与精神状态(如疲劳驾驶等),造成驾驶员执行错误的操控动作,进而直接导致事故发生。因此,通过监测驾驶员行为状态以分析驾驶员驾驶意图的研究尤其重要,目前的主要方法包括基于驾驶员眼部动作与面部表情的方法、基于驾驶动作与行为的方法以及融合驾驶行为检测结果与驾驶员生理信息的检测方法。
针对复杂工况下驾驶员异常行为识别问题,驾驶员行为分析及意图识别算法将深度特征和长短时记忆递归神经网络进行结构化融合和端到端的训练,借鉴人类视觉信息处理与决策机制,从任务相关场景显著图的生成方法、驾驶员意图推断方法和驾驶员视动机理建模方法三个方面展开研究。
1. 通过采用多传感器融合方法采集驾驶环境以及周围车辆信息,并将相关特征与驾驶员行为特征以及车辆状态特征进行同步与融合,最终建立驾驶员意图预测模型。设计多模式传感器信号采集与融合系统,采用常用车载雷达设备(如毫米波雷达或激光雷达)进行交通环境感知,并结合平行视觉理论建立基于视觉的道路图像分割系统,获得本车相对于附近车辆的位置和速度信息,道路标识牌及车道线等信息。利用深度递归网络结合来自驾驶环境、驾驶员行为状态以及车辆行驶特征的信息,实时预测行驶于不同工况下的驾驶员内在意图。
2. 基于注视点的驾驶员异常行为识别算法,针对驾驶员头部大范围转动情况,结合表观特征设计一种基于卷积神经网络的驾驶员注视点估计算法。为应对个体差异性问题,网络结构允许同时将人眼图像、头部姿态、情感表象作为输入,提升复杂工况下算法的适应能力。
3. 基于面部特征的驾驶员异常行为识别算法, 针对驾驶员在惊慌状态下对环境和车辆的感知、决策与操控能力下降,结合表观特征设计一种基于多尺度行为状态感知的驾驶员在复杂工况下的异常行为分析方法。通过研究不同照明及遮挡等复杂条件下驾驶员面部特征(眼部特征、面部朝向、面部表情) 以及不同躯干动作等目标的定位、跟踪、分类功能, 实现对动作运动轨迹的跟踪和预测。
4. 明确驾驶行为与驾驶意图的映射关系,进而探索驾驶员正常驾驶的面部表情与动作特征界限以及复杂驾驶工况的特征界限,并拟通过GPU 并行运算提高算法的检测速度,实现实时多类别驾驶工况下的驾驶员多属性检测。
基于人机意图的协同决策与控制
对国内外在协同决策方面的研究发展的回顾与总结可以发现,由于人类智能的引入,人机合作混合系统的可行域急剧扩大,需要使用高效的搜索算法以保证实时性;同时,人类价值系统复杂,难以对其进行充分、全面、有效的估计;加之人机系统外部的不确定性和随机性因素的干扰等,现有方法仍旧无法完全保证人机系统在执行动作时的绝对稳定性和安全性,无法确保人类在执行过程中的舒适性及对智能系统的信任度,而对于在执行过程中外界产生的干扰仍旧难以保证鲁棒性等。已有研究中的理论框架尚无法建立有效和可持续的人机合作混合智能系统,需要建立一套新型的理论框架来支撑。
利用平行理论的平行智能方法建立人机合作智能系统,正是突破上述技术瓶颈的有效途径。针对人类驾驶过程中的价值损益函数难以估计的问题, 通过实车实验和构建人工场景相结合的方法,来获取模拟和表示复杂交通状况的大数据,并从中提取和建立驾驶员价值损益的数学表达。针对人机共驾系统可行域广阔的问题,通过建立基于平行学习的人机共驾系统决策规划模型,并考虑驾驶员价值损益函数,采用原始数据与人工场景数据相结合的方式对其进行训练和更新,以获得人机共驾的决策规划方法;针对需要保证人机系统安全性、稳定性、鲁棒性,同时增进人类驾驶员舒适性和信任度的问题,采用平行理论中的指示学习方法,在实际执行过程中发现训练方向,并采用人工系统中大量仿真迭代的方式,不断改善控制执行的效果。
针对智能驾驶车辆的行业热点和技术难点,我们提出基于平行驾驶的平行智能车。平行驾驶汽车不仅利用智能交通设备,还充分利用车上多传感器融合资源,将实时信息传输到后台监控系统,同时系统采用人工智能等技术,学习出最佳的人工控制策略。后台的虚拟人工系统可以根据实际情况通过控制系统反向控制智能车。基于平行驾驶的平行智能车由智能车、信息传输以及整个后台系统组成, 如图5 所示。
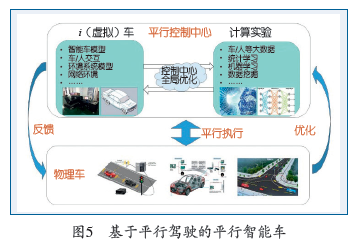
当车辆行驶在道路上,其行驶状态将实时传送到后台,后台通过大数据学习系统对智能车进行控制。当遇到特殊情况时,车辆会主动请求协助控制, 通过后台中心控制使车辆正常行驶,同时后台系统会学习相关操作,联合处理实际车辆及虚拟车辆上的信息,通过计算实验得到针对车辆状态预测及人机协同控制决策建议等。遇到紧急工况(如驾驶员疲劳驾驶)时,系统会自动将控制指令传到车辆, 从而保证车辆正常安全行驶。
人机协同平行测试与验证
目前对无人驾驶车辆的自主驾驶能力和智能水平尚缺乏统一的评估标准和规范,现有的基于特定路段的场景测试,无法充分测试和量化评估车辆的自动驾驶性能。因此,本文提出了一种有效的无人驾驶车辆系统平行测试方法,使用真实道路交通环境的多传感器感知数据,在实验室完成对无人驾驶车辆系统的仿真测试;建立了一个与实际交通系统相平行的人工交通系统,通过与仿真测试系统的互动开展集成测试,有效评测无人驾驶车辆的智能水平、环境认知能力、自主驾驶能力以及对道路交通环境的适应能力。
无人驾驶车辆系统研发需要在现场对实车物理系统进行大量测试和验证工作。而现场测试费用高、安全性差、重复性低,对车辆系统出现的异常也缺乏有效的跟踪手段。无人驾驶车辆的测试数据收集能力不足,缺乏一致的数据共享接口,难以对无人驾驶车辆的感知、决策和执行状态进行实时和精确的评估。同时,还缺乏仿真测试技术和集成测试系统,难以对无人驾驶车辆的环境认知、决策和执行算法进行高效可靠的测试评估。基于上述问题,平行测试技术旨在提供真实的测试数据,不受试验场地和时间限制,达到安全可控、测试条件可重复、测试结果可跟踪的目标。
平行测试系统[25] 的核心思路是在虚拟交通世界进行可重复的实验,通过不同智能体之间的交互作用,复现实际观测到的多种交通现象及其中的车辆动态行为。基于此思想,我们选取紧急避障和行人避让这两种代表性工况来设计人车协同共驾系统的实验方案,通过控制相应的变量(比如车速、天气、障碍物是否移动、行人移动规律),进行多次测试以获取测试评估实验后的失误率[26]。
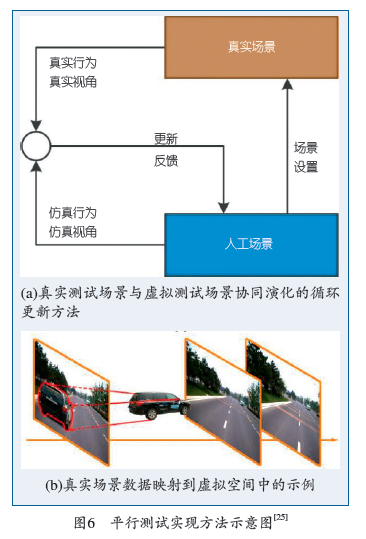
图6 为平行测试实现方法示意图。研究内容包括两部分:
1. 建立人工交通场景。基于所采集的交通环境的高精度图像、三维激光点云等数据进行建模,建立包含园区、城市的数字虚拟交通环境和包含智能网联汽车实体、模拟测试平台的试验场道路场景; 另外,基于真实交通环境采集的视频、三维激光点云等数据,构建更复杂的虚拟交通环境,包括不同道路、不同标牌、地下停车场等交通场景;构建更加复杂的天气环境,包括下雨、下雪、大雾等恶劣天气。
2. 无人驾驶车辆平行测试方法。在虚拟环境下自动生成交通参与者、特殊天气以及环境等要素, 在测试园区道路场景基础上,模拟更多的交通测试场景,保证其多样化和高覆盖率,在前述智能测试体系下通过设定测试任务完成无人驾驶车辆的各项功能测试。
结论
本文基于平行系统理论,提出了一种基于人机意图智能融合的平行驾驶技术框架。基于人机意图智能融合的平行驾驶技术大大降低了智能车辆研发成本,减少交通拥堵及整体协同程度,有效解决了现阶段车辆行驶安全性问题。此外,人机意图智能融合技术为解决驾驶行为状态感知和意图分析、驾驶员行为建模、人车协同行为决策机制以及驾驶控制权优化分配及切换机制等问题提供了有效的解决方案,不仅在解决驾驶员与汽车控制系统的协同问题理论研究方面具有创新意义,而且在主动安全系统设计方面有着重要的应用价值。
致谢
本研究由英特尔智能网联汽车大学合作研究中心(ICRI-IACV)、北京市科委项目人机意图智能融合的平行驾驶技术研究及应用验证(No. Z181100008918007)、国家基金委重点项目“基于CPSS 的流程工业生产计划知识自动化系统及应用验证”(61533019) 和国家基金委项目指导专家组战略研究及平台建设费用计划(重大研究计划“视听觉信息的认知计算”战略研究项目, 91720000)资助, 一并感谢。
参考文献
[1] 刘腾, 于会龙, 田滨, 艾云峰, 陈龙. 智能车的智能指挥与控制: 基本方法与系统结构[J]. 指挥与控制学, 2018, 01: 22-31.
[2] Wang F Y. Artificial intelligence and intelligent transportation: driving into the 3rd axial age with ITS [J]. IEEE Intelligent Transportation Systems Magazine, 2017, 9(4): 6-9.
[3] 王飞跃. 人工社会、计算实验、平行系统——关于复杂社会经济系统计算研究的讨论[J]. 复杂系统与复杂性科学, 2004, 1(4): 25-35.
[4] 孙振平. 自主驾驶汽车智能控制系统[D]. 国防科学技术大学, 2004.
[5] Xiong G, Zhou P, Zhou S, et al. Autonomous driving of intelligent vehicle BIT in 2009 future challenge of China[C]// IEEE Intelligent Vehicles Symposium. 2010: 1049-1053.
[6] 陈慧岩, 熊光明, 龚建伟, 姜岩. 无人驾驶汽车概论[M]. 北京: 北京理工大学出版社, 2014.
[7] Wang F Y . The Emergence of Intelligent Enterprises: From CPS to CPSS [J]. IEEE Intelligent Systems, 2010, 25(4): 85-88.
[8] 王飞跃. 平行控制: 数据驱动的计算控制方法[J]. 自动化学报, 2013, 39(4): 293-302.
[9] Li Q, Chen L, Li M, et al. A sensor-fusion drivable-region and lane-detection system for autonomous vehicle navigation in challenging road scenarios[J]. IEEE Transactions on Vehicular Technology, 2014, 63(2): 540-55.
[10] Xu L, Wang Y, Sun H, et al. Design and implementation of driving control system for autonomous vehicle[C]// IEEE International Conference on Intelligent Transportation Systems. 2014:22-28.
[11] Mei T, Liang H, Kong B, et al. Development of 'Intelligent Pioneer' unmanned vehicle[C]//IEEE Intelligent Vehicles Symposium. 2012: 938-943.
[12] Guo M, Xu Y, Zhang Y, et al. A decision-making method for unmanned cars based on drivable area cutting[C]// IEEE 2nd International Conference on Cloud Computing and Intelligent Systems . 2012, 3: 1210-1215.
[13] 李力, 林懿伦, 曹东璞, 郑南宁, 王飞跃. 平行学习——机器学习的一个新型理论框架[J]. 自动化学报, 2017, 43(1): 1-8.
[14] Liu T, Tian B, Ai Y, Li L, Cao D, Wang F Y. Parallel Reinforcement Learning: A Framework and Case Study[J]. IEEE/CAA Journal of Automatica Sinica, 2018.
[15] Liu T, Hu X, Li S, Cao D. Reinforcement Learning Optimized Look-Ahead Energy Management of a Parallel Hybrid Electric Vehicle[J]. IEEE Transactions on Mechatronics, 2017.
[16] 王飞跃. 平行系统方法与复杂系统的管理和控制[J]. 控制与决策, 2004, 19(5): 485-489.
[17] Wang K, Gou C, Zheng N, et al. Parallel vision for perception and understanding of complex scenes: methods, framework, and perspectives[J]. Artificial Intelligence Review, 2017, 48(3): 299-329.
[18] Li X, Wang K, Tian Y, et al. The ParallelEye dataset: Constructing large-scale artificial scenes for traffic vision research[OL]. arXiv preprint arXiv:1712.08394, 2017.
[19] 王坤峰, 苟超, 王飞跃. 平行视觉: 基于ACP 的智能视觉计算方法[J]. 自动化学报, 2016, 42(10): 1490- 1500.
[20] Tian Y, Li X, Wang K, Wang F. Y. Training and Testing Object Detectors with Virtual Images[J]. IEEE/CAA Journal of Automatica Sinica, 2018, 5(2):539-546.
[21] Wang F Y, Yuan Y, Rong C, Zhang J, Parallel Blockchain: An Architecture for CPSS-based Smart Societies[J]. IEEE Transactions on Computational Social Systems, 2018, 5.
[22] 袁勇, 王飞跃. 区块链技术发展现状与展望[J]. 自动化学报, 2016, 42(4): 481-494.
[23] 袁勇, 王飞跃. 平行区块链: 概念、方法与内涵解析[J]. 自动化学报, 2017, 43(10): 1703-1712.
[24] 袁勇, 周涛, 周傲英, 段永朝, 王飞跃. 区块链技术: 从数据智能到知识自动化[J]. 自动化学报, 2017, 43(9): 1485-1490.
[25] Li L, Huang W L, Liu Y, et al. Intelligence testing for autonomous vehicles: A new approach[J].IEEE Transactions on Intelligent Vehicles, 2016, 1(2): 158- 166.
[26] Li L, Lin Y, Zheng N, et al. Artificial intelligence test: A case study of intelligent vehicles[J].Artificial Intelligence Review, 2018.
后记:本文于2018年8月发表于《中国计算机学会通讯》第14卷第8期








https://blog.sciencenet.cn/blog-2374-1160195.html
上一篇:[转载]《自动化学报》45卷1期网刊已经发布, 敬请关注, 谢谢
下一篇:[转载]约翰·阿奇博尔德·惠勒:传记回忆录