博文
智能是人机环境系统交互的产物
||
智能不是人脑(或类脑)的产物,也不是人自身的产物,而是人、物、环境系统相互作用的产物,正如马克思所言:“人的本质不是单个人所固有的抽象物,在其现实性上,它是一切社会关系的总和”【1】,比如狼孩尽管具有人脑的所有结构和组成成分,但没有与人类社会环境系统的交流或交互,也不可能有人的智能和智慧。事实上,真实的智能同样也蕴含着这人、物、环境这三种成分,随着科技的快速发展,其中的“物“却也逐渐被人造物——”机“所取代,简称为人机环境系统(为简化起见,后面均以“人机环境系统”一词代替“人物环境系统”一词),平心而论,人工智能要超越人类智能,在现有数学体系和软硬件的设计模式基础之上,基本上不大可能,但在人机一体化或人机环境系统中却是有着可能。人工智能是逻辑的,智能则不一定是逻辑的。智能是一个非常辽阔的空间,它可以随时打开异质的集合,把客观的逻辑与主观的超逻辑结合起来。
研究复杂性问题是困难的,但把它分解成人机环境系统问题就相对简单一些,至少可以从人、机、环境角度去思考理解;研究智能——这个复杂问题也是困难的,但同样也可把它分解成人机环境系统问题研究分析处理,人所要解决的是“做正确的事(杂)”,机所要解决的是“正确地做事(复)”,环境所要解决的是“提供做事平台(复杂)”。正如郭雷院士所言:“复杂性和智能化是系统科学发展的两个永恒的主题。复杂性主要体现的是系统科学认识世界的一面,而智能化主要体现的是系统科学改造世界的一面。” 【2】
2020、2021年注定是两个人类难忘的年份,这两年除了席卷全球的新冠疫情外,还出现了一个奇特的现象,即人件、软件、硬件、环件等智能化条件均属世界第一的美国新冠感染者世界排名第一,并且死亡人数也是世界排名第一的现象。不难看出,对于人+机+环境系统而言,美国不但不是第一,而且是规模性失调,所以,中美角力的焦点不仅仅是人、机、环境每一或所有单项人工智能的领先优势,更重要的是人、机、环境系统混合智能的整合。下面将针对人机环境系统与智能问题展开分析和探讨。

本文摘选自2023.5出版的《 系统科学进展 3 》一书P123-158
一、 智能的回溯
要想预测一个人的未来,需要了解其过去。同样,要想展望智能的未来,需要先了解它的起源与历史。
在人类的文明的历史中,有过四大文明古国,在这四大文明古国里边最著名的,即古巴比伦和古埃及,这两个文明,几乎同时出现,它们是距今6000多年前,就已经有了国家、工具、文字出现,这两个文明直接导致了欧洲文明的起源。这两个文明主要是研究人和物之间的关系,例如水利、工具、一些制度、法律。这种人和物之间的关系,后来影响到了欧洲的一些地中海(希腊)文明,后来辐射到整个欧洲大陆,诞生了科学和技术,科学和技术的宗旨研究,就是人和物之间的关系。
除了这两个最早的文明以外,第三大文明就是古印度文明。古印度文明里面很重要的特质,就是研究人和神之间的关系。人神之间的关系,主要是人和抽象事物,不可掌控的一些事物之间的关系,在中东一带,诞生了世界所有最主要的宗教,像伊斯兰教、像基督教、印度教,佛教等等,都源于此,都是关于人和神之间关系的。
第四大文明是研究人和人之间关系,人和环境之间关系的一个重要的文明,即中华文明。目前世界上保存的较完整、较好的文明,就是中华文明。中华文明体现的不是人和物,人和神之间的关系,是人和人之间如何融洽,人和环境之间如何和谐,天、地、人之间如何共生的问题。
在距今2500年以前,西方的最主要的科学之祖,也是哲学之祖,是泰勒斯,他和中国的老子、孔子差不多出现在同一时代,其思想体现在他的一句箴言里面即“Water is best(水是最好的)”。水是一种物质,地球生物是海洋里诞生出来的,然后水又滋育的和哺育了人类,所以西方的科学和哲学一开始就和物质密切相关,而我们的老子对水也有阐述“上善若水”,孔子的“逝者如斯夫”,也是对水的一种感叹,但他们大多都拘泥于感性和伦理方面,故东西方文明的差异从这几个代表性人物语言里边大家可见一斑。
从上文可见在岁月的发展的历史长河当中,人类四大文明分别聚焦于人物、人神、人人、人与环境,相互之间的关系,而科学和技术的发展,和人和物之间密切相关,所以,现代科学技术起源于欧洲,是顺理成章的,也是可以理解的。但目前来看,随着社会和人类不断的进步,人和人、人和环境之间的关系被日益提到日程上来。所以,现在整个世界的焦点,逐渐从西方转移到了以人与人、人与环境为主的东方视角来。
人和物之间的关系,是西方一个重要的研究方向,机器是人造物,所以人机交互,也是起源于这个西方。人机交互的本质是共在,即“being together”。人把自己的优点,和机器的长处结合在一起,形成了一个交互的,实质性的问题,而未来人工智能的发展方向,很可能是人机混合智能或人机混合智能,即把人的智慧和机器的智能结合在一起,形成一个更有力的,支撑性的发展趋势,这样不但研究人机交互的脖子以下的,即生理的问题,而且还会研究脖子以上的,即心理的或者大脑的问题。其实,人机交互或人机混合智能,都是不准确的词,最准确的词是人机环境交互系统,因为人和机器及物质,其交互是不完整的,是通过环境这个大系统,来进行沟通的,所以人机环境系统工程,可能是未来的,一个主要的研究方向。
那么,人工智能或智能的本质是什么?可以从人的成长经历或发展上看出一些端倪。一般来说胎儿在母亲腹中,就已经开始有了各种感觉,如听觉、嗅觉、味觉、触觉,已经开始和外部的环境及母亲腹中的内部环境进行交互,已经产生了一个,很简单的“我”的概念。然后,出生以后,因为视觉、听觉等感觉发育得不是很完善,更多的是用触觉来接触世界,了解他周围的一些事物,随着自主能力的产生,会试图摆脱大人的束缚,更愿意自己爬,自己走,不希望别人去扶。可以看到,这时候已经开始否定了,否定别人的帮助。据国内外最新的研究结果,小孩形成语言的时候,无论东方还是西方,除了被不断重复灌输的爸爸、妈妈这种词以外,自己先说出的,都是从第一个单词——动词“不”开始的,然后会发展到,说“没有”还有“别”这些词。“不”、“没有”、“别”这些词,就是孩子们成长的一个过程,在这个过程当中,就体现出人的智能,是从否定开始的,否定外部,否定自己,否定很多事物,来产生了某种智慧性的东西。需要注意,在人工智能里边,其否定机制,还远远没有产生,所以人工智能和人的智能,有很大的差异。
为什么会有许多人不断提出有关未来智能的各种问题?主要是因为现在的人工智能还远远未达到大家的期望,现在大家看到的AI某种意义上都是自动化或者是高级自动化,那智能化和自动化有什么区别呢?自动化是这样的,固定的输入及可期望的输出,如很多生产线都是自动化生产线,而智能化不是这样,输入可以固定也可以不固定,但是输出一定是非预期性的,绝大部分是非预期的“智者,是非之心也”,是非之心就是“智”,你可以有意识,但不一定有智慧,意识是无关乎是非的,而智慧是要知道是非的,明白伦理的。那什么是伦理呢?从古希腊角度来看,伦是分类,分类的道理就是伦理;大家注意智能的本质也是分类——是非之心,古希腊人就把伦理当做分类的道理。什么叫道德呢?道就是走路的大道,德是什么?获得。按照正确的道路走,得到你想要的东西就叫做道德,如果不按照正确的路走就没有道德。
我们在研究过程中发现,人工智能的起点,第一个词是“是”,“being”,即存在,客观的物质,这是西方的哲学的一个很重要的词,世界是物质的还是意识的,其中物质就是“being”。然后,关于人的智能和智慧,还存在着“should”,“应该”。《三国演义》里面的“义”,就是“should”,“应该”的意思,“仗义”的“义”也是“应该”的意思,“应该”这个词,在西方里边非常重要,在东方里边也很重视,这是东西方交流的一个交汇点。Should,翻译成哲学语言,就是意识,即awareness、consciousness。另外还有want,人有want,即想干什么,而机器不会want,机器只会按照程序、指令进行操作,而人还有一个“能(can)”的问题,即能做还是不能做。机器没有这个问题,只是操作。
休谟之问是指英国哲学家大卫.休谟(David Hume)1711年在《人性论》的第一卷和《人类理智研究》里面提出来的:从“是”(Being)中能否推出“应该”(Should)来,即从客观事实里能否推出主观价值。中国古代著名的一句话“天行健,君子必自强不息”是不成立的。“天行健”是一个事实,“君子必自强不息”则是一种价值观,二者不能划等号,这里面涉及到一个很重要的词“change”,“变”,人会不断的“change”,而机器则不能,只会按部就班、因循守旧、刻舟求剑。我们认为这五个词(being、should、want、can、change)是人工智能和人类智能很重要的差异。另外,人还有一个很重要的特质,即感知的恒常性,人在变化的外界环境当中通常能够保留对这个事物的本来面目的感知,例如某种颜色。在不同的背景下,会改变这种颜色的影响,但是人却会能够在这种变化当中,找到不变的那种感觉,而机器不然,机器它对外部变化的颜色,会有一个实时的反应,很难找到那种不变的东西。
在现代的人工智能的发展,剑桥大学起到了非常重要的作用,其中有三个代表性的人物,第一个就是阿兰·图灵,他提出了图灵测试和图灵机的思想,然后影响了整个世界人工智能发展的轨迹。第二个人就是著名的深度学习之父Geoffrey Hinton,他是剑桥大学心理系的本科生,后来到了加拿大,继续做关于人工神经网络的研究,并提出了深度学习的概念和方法,人工智能因此而得到了复兴和现在的繁荣。第三个是AlphaGo之父哈萨比斯,他是剑桥大学计算机系的本科毕业生,对推动人工智能的发展,也起到了非常重要的作用。【3】
霍金曾说过,在过去的数十年里,人工智能一直专注于围绕建设智能体所产生的问题,即在特定的情境下,可以感知并行动的各种系统。在这种情况下,智能是一个与统计学,和经济学相关的理性概念。通俗地讲,这是一种做出好的决定计划和推论的能力。
人工智能来自于智能,而智能,究其最深之处就变成一个哲学问题。早期有一批伟大的哲学家一直在讨论什么是智能,什么是知识。迈克·波兰尼(Michael Polanyi),他曾在20世纪60年代写过一部著名的著作《The Tacit Dimension(默会的维度)》,提出“我们知道的越多,那么我们知道的越少”。同时他还认为我们知道的远比我们说出来的要很多(We can know more than we can tell)。波兰尼这句话里面,体现出了默会的知识、隐形的知识,在支配着我们不断的向显性的知识进行递进、进行演化。
另一个是弗里德里希·哈耶克(Friedrich Hayek)。哈耶克在经济方面对世界的影响很大,曾拿过诺贝尔经济学奖。他一生当中,涉列了政治、社会、经济、文化、艺术、哲学和心理学,在认知科学方面,他有一本著作《The Sensory Order(感觉的秩序)》。在这本书中,他明确地提出了一个观点“Action more than design”即行为远比设计更重要,其大意即人的各种感觉,是通过行为来表征出来的,而不是故意设计出来的,后来的演化造成了设计出现。维基百科的创立人之一吉米·威尔士(Jimmy Wales)很推崇《The Sensory Order》一书,认为是这本书,点醒了他创立了维基百科。
第三个是卡尔·波普尔(Karl Popper),他是一个伟大的哲学家,提出了三个世界的观点,物理的、精神的和人工的。他有一本非常经典的著作《科学发现的逻辑》,他提出科学不是证实而是证伪,他认为科学是提出问题进行猜想,然后进行反驳,不断的试错,有科学的出现,而不是常规意义上的观察归纳,然后证实的实证机制。在归纳里面有很多的漏洞,因为归纳是不完全的归纳,波普尔就有针对性的对归纳进行了梳理。
通常认为人工智能的学科起源,是从1956年美国达特茅斯会议开始。但它的科学起源,可以最早追溯到19世纪曾任剑桥大学卢卡斯教授的查尔斯·巴贝奇(Charles Babbage),他是世界上做机械计算机的鼻祖,做了一台机械的计算机,计算正弦和余弦数值的大小,从此人类拉开了计算的帷幕。另一个是剑桥大学的伯特兰·罗素(Bertrand Russell),罗素利用其哲学思想和他的数学基础,创立了一个很重要的哲学分支——分析哲学。分析哲学的至高点是维特根斯坦(Ludwig Wittgenstein),维特根斯坦的前半期写了一部重要的著作——《逻辑哲学论》,这部书里提出,语言是哲学的重要的工具,也是哲学的切入点。在此之前,哲学的发展有两个里程碑,第一个是关于世界本源的问题,即是物质的还是意识的,这个讨论了一千多年,后来笛卡尔开始研究用什么样的方法来认识世界是物质的还是意识的,提出二元论。在此之后,人们找了很多方法来研究哲学,但收效甚微,直到维特根斯坦,他改变了哲学的轨迹。他前半生研究关于语言的人工性,所谓人工性的语言就是标准化的语言,格式化的语言,是流程性的程序化的语言,而他的后半期主要否定了自己前半期的工作,开始研究生活化的语言,自然性的语言。认为真正的哲学是通过生活化的语言,来体现出哲学的深奥和哲学的意义。
针对智能的概念,权威辞书《韦氏大辞典》的解释是“理解和各种适应性行为的能力”;《牛津词典》的说法是“观察、学习、理解和认知的能力”;《新华字典》的解释是“智慧和能力”;美国著名人工智能研究专家阿尔布斯(James Albu)在答复另一人工智能专家埃克斯穆尔(Henry Hexmoor)时说“智能包括:知识如何获取、表达和存储;智能行为如何产生和学习;动机、情感和优先权如何发展和运用;传感器信号如何转换成各种符号;怎样利用各种符号执行逻辑运算,对过去进行推理及对未来进行规划;智能机制如何产生幻觉、信念、希望、畏惧、梦幻甚至善良和爱情等现象”。作为一门前沿科学和交叉学科,人工智能至今尚无统一的定义。不同科学背景的学者对人工智能做了不同的解释:符号主义学派认为人工智能基于数理逻辑,通过计算机的符号操作模拟人类的认知过程,从而建立起基于知识的人工智能系统;联结主义学派认为人工智能基于仿生学,特别是人脑模型的研究,通过神经网络及网络间的链接机制和学习算法,建立起基于人脑的人工智能系统;行为主义学派认为智能取决于感知和行动,通过智能体与外界环境的交互和适应,建立基于“感知-行为”的人工智能系统。其实这三个学派从思维、脑、身体三个方面对人工智能做了阐述,目标都是创造出一个可以像人类一样具有智慧,能够自适应环境的智能体。
发展至今,总体而言,人工智能的进展可以分为四个阶段:酝酿阶段、初步发展阶段、积累阶段与蓬勃发展阶段。
1、酝酿阶段
任何事物的形成与发展都有一定的基础,人工智能领域也不例外。首先,在哲学领域,学者对于意识问题情有独钟。自从笛卡尔17世纪提出我思故我在的论述之后,有关意识的组成争论就从未停止过。托马斯·霍布斯、梅洛·庞蒂等人曾经明确反对身心二元论,前者认为是人是纯粹理性的,而后者认为身体和心理并不是独立分开的个体。可以说,这些哲学争论为早期的人工智能起到了很好的促进与推动作用。
其次,在1943年,麦克卡洛与匹茨提出了著名的MP神经模型(McCulloch-Pitts neural model),他们将神经元视为二值开关,通过不同的组合方式可以实现不同的逻辑运算。该模型的意义在于其开创了人工神经网络的研究。1949年,唐纳德·赫布(Donald Hebb)提出学习模型,大体观点为,如果在突触前后的两个神经元被同步激活,那么这个突触连接增强。MP模型与Hebb学习规则的确立为后期的联结主义奠定了基础。
在其他领域,现代计算机之父冯·诺依曼(Von Neumann)于1945年提出了后来被称为冯·诺依曼结构的计算机体系结构,并被沿用至今。1948年,维纳(Norbert Wiener)指出了神经系统与计算机工作的相似性,找到了他们内在联系,将自动控制的研究提到了一个新的高度,对后期人工智能学科的创立产生了巨大的影响。【4】1936与1950年,图灵(Alan Turing)先后提出图灵机与图灵测试的概念,旨在弄清楚计算机能做什么,如何定义智能等关键问题。维特根斯坦也对这个问题有所思考,他在著作《哲学研究》明确指出:机器肯定不能思维。
2、起步发展阶段
人工智能早期发展主要领域在于公理证明。首先,纽厄尔(Allen Newell)和西蒙(Herbert Simo)编写了一种名为逻辑理论机器(LTM)的智能程序,用来证明数学命题。与常见的数学推理过程不同,这种程序由结论出发,一步步从后向前分析,直到找出合适的证明问题为止。1963年,LTM程序证明了怀特海与罗素《数学原理》第一章中的全部定理。两年后,逻辑学家王浩和数理逻辑家鲁滨逊(Abraham Robinson)使用消解方法,使用机器证明了《数学原理》中的全部命题演算定理。
另外,在其它研究领域也有了初步的进展。1957年,罗森勃拉特(Frank Rosenblatt)首次引入了感知机的概念,推广了联结主义的研究,同时感知机的出现,使神经网络也露出了其庐山面目。几年后,模仿自然生物进化机制的演化计算开始出现,代表人物为霍兰德(John Holland)与福格尔(David Fogel)。1965年,MIT人工智能实验室的罗伯兹编织了多面体识别程序,开创了机器视觉的领域。
3、反思发展阶段
在起步发展阶段,各个领域都有了一定的进展。但是,这离当初设想的人工智能程度还所去甚远。1969年,被称为“人工智能之父”的马文·明斯基(Marvin Minsky)与派普特(Seymour Papert)发表著作《Perceptrons》,指出单层感知器不能实现XOR(异或问题)逻辑。这极大的打击了研究者的信心。20世纪70年代初,对AI提供资助的机构(如DARPA、NRC)对无方向的AI研究逐渐停止了资助。人工智能的第一次寒冬到来。
在低谷阶段,人工智能界开始了反思。一派是以德雷福斯(Hubert Dreyfus)为代表,无情的对人工智能进行批判。他曾说道人工智能研究终究会陷入困局。而另一派则对人工智能抱有希望,代表人物为费根鲍姆(Edward Feigenbaum),他认为要摆脱困境,需要大量使用知识。于是,知识工程与专家系统在各个领域崭露头角,比如早期的反向链接专家系统MYCIN可以诊断一些特定类型的传染病。这个阶段(1976-1980)也称为复兴期。
进入20世纪80年代后,人工智能界重新肯定了早期人工智能研究中神经联结方法与遗传算法。1982年,霍普菲尔德(John Hopfield)提出了Hopfield神经网络,引入了“计算能量”概念,给出了网络稳定性判断。1984年,他又提出了连续时间Hopfield神经网络模型,为神经网络的研究做了开拓性的工作。1986年辛顿(Geoffrey Hinton)、卢默哈特(David Rumelhart)和麦克勒蓝(James McClelland)重新提出了反向传播算法,即BP算法。值得一提的是,联结主义不同于符号主义,其研究方法巧妙的避开了知识表示所带来的困难。
与此同时,布鲁克斯(Rodney Brooks)教授在1991年发表论文,批评联结主义与符号主义不切实际,将简单事情复杂化。他强调感知与行为直接联系,这也极大程度的促进了人工智能界另一学派-行为主义的发展。
由此可见,在这一阶段,人工智能的研究空前繁荣,可是好景不长,1987年现代计算机的出现,让人工智能的寒冬再次降临。人们普遍发现人工智能领域方面没有实质性的突破,而所谓的专家系统使用范围依然有限。于是,人工智能研究再一次陷入停滞。
4、蓬勃发展阶段
1997年深蓝的胜利,使得人们重燃对于人工智能的兴趣。2006年,杰弗里·辛顿(Geoffrey Hinton)提出深度置信网络,使深层神经网络的训练成为可能,这也使得深度学习迎来了春天。2011年,IBM的Watson参加“危险边缘”问答节目,并打败了两位人类冠军,轰动一时。2012年,辛顿的学生Alex Krizhevsky使用AlexNet已大幅度的优势取得了当年ImageNet图像分类比赛的冠军,深度神经网络逐渐开始大放异彩。同年,运用了深度学习的技术的谷歌大脑(Google Brain)通过观看数千段的视频后,自发的找出了视频中的猫。2016年,Google DeepMind的AlphaGo战胜了世界顶级围棋高手李世石,由此推动了人工智能的再一次发展,此后“阿尔法Zero”、“ MuZero”、“AlphaFold”等一系列算法陆续出现,从而引发了人工智能将如何改变人类社会生活形态的话题。目前正处于人工智能发展的第三次高潮期。【5】
二、智能的第一原理
1、计算与算计
休谟认为:“一切科学都与人性有关,对人性的研究应是一切科学的基础。”,任何科学都或多或少与人性有些关系,无论学科看似与人性相隔多远,它们最终都会以某种途径再次回归到人性中。科学尚且如此,包含科学的复杂也不例外,其中真实的智能有着双重含义:一个是事实形式上的含义,即通常说的理性行动和决策的逻辑,在资源稀缺的情况下,如何理性选择,使效用最大化;另一个是价值实质性含义,既不以理性的决策为前提,也不以稀缺条件为前提,仅指人类如何从其社会和自然环境中谋划,这个过程并不一定与效用最大化相关,更大程度上属于感性范畴。理性的力量之所以有限,是因为真实世界中,人的行为不仅受理性的影响,也有“非理性”的一面。人工智能“合乎伦理设的计”很可能是黄粱一梦,原因很简单,伦理对人而言还是一个很难遵守的复杂体系。简单的伦理规则往往是最难以实现的,比如应该帮助处在困难中的人,这就是一条很难(遵守者极容易上当被骗)操作的伦理准则。对于AI这个工具而言,合乎伦理设计应该科幻成分多于科学成分、想象成分多于真实成分。
当前的人工智能及未来的智能科学研究具有两个致命的缺点:(1)把数学等同于逻辑;(2)把符号与对象的指涉混淆。所以,人机混合深度态势感知的难点和瓶颈在于:(1)(符号)表征的非符号性(可变性);(2)(逻辑)推理的非逻辑性(非真实性)(3)(客观)决策的非客观性(主观性)。
智能是一个复杂的系统,既包括计算也包括算计,一般而言,人工(机器)智能擅长客观事实(真理性)计算,人类智能优于主观价值(道理性)算计。当计算大于算计时,可以侧重人工智能;当算计大于计算时,应该偏向人类智能;当计算等于算计时,最好使用人机智能。费曼说:“物理学家们只是力图解释那些不依赖于偶然的事件,但在现实世界中,我们试图去理解的事情大都取决于偶然。”。但是人、机两者智能的核心都在于:变,因时而变、因境而变、因法而变、因势而变……
如何实现人的算计(经验)与机的计算(模型)混合后的计算计系统呢?太极八卦图就是一个典型的计算计(计算+算计)系统,有算有计,有性有量,有显有隐,计算交融,情理相依。其中的“与或非”逻辑既有人经验的、也有物(机)数据的,即人价值性的“与或非”+机事实性的“与或非”,人机混合智能及深度态势感知的任务之一就是要打开与、或、非门的狭隘,比如大与、小与,大或、小或,大非、小非……大是(being)、大应(should)、小是(being)、小应(should)。人的经验性概率与机器的事实性概率不同,它是一种价值性概率,可以穿透非家族相似性的壁垒,用其它领域的成败得失结果影响当前领域的态势感知【6】,比如同情、共感、同理心、信任等。
人类智能的核心是意向指向的对象,机器智能的核心是符号指向的对象,人机智能的核心是意向指向对象与符号指向对象的结合问题。它们都是对存在的关涉,存在分为事实性的存在和价值性的存在、还有责任性的存在。比如同样的疫情存在,钟南山院士说的就是事实性存在,特朗普总统说的就是价值性存在,同时他们说的都包含责任性存在,只不过一个是科学性责任,一个是政治性责任。
一般而言,数学解决的是等价与相容(包涵)问题,然而这个世界的等价与相容(包涵)又是非常复杂,客观事实上的等价与主观价值上的等价常常不是一回事,客观事实上的相容(包涵)与主观价值上的相容(包涵)往往也不是一回事,于是世界应该是由事实与价值共同组成的,也即除了数学部分之外,还有非数之学部分构成,科学技术是建立在数学逻辑(公理逻辑)与实验验证基础上的相对理性部分,人文艺术、哲学宗教则是基于非数之学逻辑与想象揣测之上的相对感性部分,二者的结合使人类在自然界中得以不息的存在着。
某种意义上,数学就是解决哲学上“being”(是、存在)的学问(如1/2,2/4,4/8……等价、包涵问题),但她远远没有、甚至也不可能解决“should”(应、义)的问题。例如,当自然哲学家们企图在变动不居的自然中寻求永恒不变的本原时,巴门尼德却发现、没有哪种自然事物是永恒不变的,真正不变的只能是“存在"。在一个判断中(“S是P”),主词与宾词都是变动不居的,不变的惟有这个“是”(being)。换言之,一切事物都“是”、都"存在”,不过其中的事物总有一天将“不是”、“不存在”,然而“是”或“存在”却不会因为事物的生灭变化而发生变化,它是永恒不变的,这个“是”或“存在”就是使事物“是”或“存在”的根据,因而与探寻时间上在先的本原的宇宙论不同,巴门尼德所追问的主要是逻辑上在先的存在,它虽然还不就是但却相当于我们所说的“本质”。这个“是”的一部分也许就是数学。
人机环境之间的关系既有有向闭环也有无向开环,或者有向开环也有无向闭环,自主系统大多是一种有向闭环行为。人机环境系统混合的计算计系统也许就是解决休谟之问的一个秘密通道,即通过人的算计结合机器的计算实现了从“事实”向“价值”的“质的飞跃”。
有人认为:“全场景智慧是一个技术的大混合。”,实际上,这是指工程应用的一个方面,如果深究起来,还是一个科学技术、人文艺术、哲学思想、伦理道德、习俗信仰等方面的人物环境系统大混合,如同这次抗疫。较好的人机交互关系如同阴阳图一样,你中有我,我中有你,相互依存,相互平衡,就像当前的中美关系一样,美国想去掉华为的芯片,英特尔等就受损。简单地说,目前人机关系就是两条鱼,头尾相连,黑白相间。
每个事物、每个人、每个字、每个字母……都可以看成一个事实+价值+责任的弥聚子,心理性反馈与生理性反馈、物理性反馈不同。感觉的逻辑与知觉的逻辑不同,易位思考,对知而言,概念就是图型,对感而言,概念就是符号。从智能领域上看,没有所谓的元,只有变化的元,元可以是一个很大的事物,比如太阳系、银河系都可以看成一个元单位。我们称之为智能弥聚子。
科学家们常常只是力图解释那些不依赖于偶然的事件,但在现实世界中,人机环境系统工程往往试图去理解的事情大都取决于一些偶然因素,如同人类的命运。维特根斯坦(Ludwig Wittgenstein)就此曾有过著名的评论:“在整个现代世界观的根基之下存在一种幻觉,即:所谓的自然法则就是对自然现象的解释。”,基切尔也一直试图复活用原因解释单个事件的观点,可是,无穷多的事物都可能影响一个事件,究竟哪个才应该被视作它的原因呢?。更进一步讲,科学永远都不可能解释任何道德原则。在“是”与“应该”的问题之间似乎存在一道不可逾越的鸿沟。或许我们能够解释为什么人们认为有些事情应该做,或者说解释为什么人类进化到认定某些事情应该做,而其他事情却不能做,但是对于我们而言,超越这些基于生物学的道德法则依然是一个开放的问题。牛津大学的彭罗斯教授也认为:“在宇宙中根本听不到同一个节奏的“滴答滴答”声响。一些你认为将在未来发生的事情也许早在我的过去就已经发生了。两位观察者眼中的两个无关事件的发生顺序并不是固定不变的;也就是说,亚当可能会说事件P发生在事件Q之前,而夏娃也许会反驳说事件P发生在事件Q之后。在这种情形下,我们熟悉的那种清晰明朗的先后关系——过去引发现在,而现在又引发未来——彻底瓦解了。没错,事实上所谓的因果关系(Causality)在此也彻底瓦解了。” ,也许有一种东西,并且只有这种东西恒久不变,它先于这个世界而存在,而且也将存在于这个世界自身的组织结构之中:它就是——“变”。
某种意义上讲,智能是文化的产物,人类的每个概念和知识都是动态的,而且只有在实践的活动中才可能产生多个与其它概念和知识的关联虫洞,进而实现其“活”的状态及“生”的趋势。同时,这些概念和知识又会保持一定的稳定性和继承性,以便在不断演化中保持类基因的不变性。时间和空间是一切作为知识概念的可能条件,同时也是许多原理的限制:即它们不能与存在的自然本身完全一致。可能性的关键在于前提和条件,一般人们常常关注可能性,而忽略关注其约束和范围。我们把自己局限在那些只与范畴相关的原理之上,与范畴相关,很多与范畴无关的原理得不到注意和关涉。【7】实际上,人机环境系统中的中态、势、感、知都有弹性,而关于心灵的纯粹物理概念的一个问题是,它似乎没有给自由意志留多少空间:如果心灵完全由物理法则支配,那么它的自由意志就像一块“决定”落向地心的石头一样。所有的智能都与人机环境系统有关,人工智能的优点在于缝合,人工智能的缺点在于割裂,不考虑人、环境的单纯的人工智能软件、硬件就是刻舟求剑、盲人摸象、曹冲称象……简单地说,就是自动化。
人的学习是初期的灌输及更重要的后期环境触发的交互学、习构成,机器缺乏后期的能力。人的学习是事实与价值的混合性学习,而且是权重调整性动态学习。人的记忆也是自适应性,随人机环境系统而变化,不时会找到以前没注意到的特征。通过学习,人可以把态转为势,把感化成知,机器好像也可以,只不过大都是脱离环境变化的“死”势“僵”知。聪明反被聪明误有时是人的因素,有时是环境变化的因素。我们生活在一个复杂系统(complex system)中,在这种系统中有许多互相作用的变主体(agent)和变客体。人机混合中有多个环节,有些适合人做,有些适合机做,有些适合人机共做,有些适合等待任务发生波动后再做,如何确定这些分工及匹配很重要,如何在态势中感知?或在一串感知中生成态势?从时间维度上如何态、势、感、知?从空间维度上如何态、势、感、知?从价值维度上如何态、势、感、知?这些方面都很重要。
那么,如何实现有向的人机混合与深度的态势感知呢?一是“泛事实”的有向性。如国际象棋、围棋中的规则规定、统计概率、约束条件等用到的量的有向性,人类学习、机器学习中用到的运算法则、理性推导的有向性等,这些都是有向性的例子。尽管这里的问题很不相同,但是它们都只有正、负两个方向,而且之间的夹角并不大,因此称为“泛事实性”的有向性。这种在数学与物理中广泛使用的有向性便于计算。二是“泛价值”的有向性,亦即我们在主观意向性分析、判断中常用到的但不便测量的有向性。我们知道,这里的向量有无穷多个方向,而且两个方向不同的向量相加通常得到一个方向不同的向量。因此,我们称为“泛价值”的有向量。这种“泛向”的有向数学模型,对于我们来说方向太多,不便应用。
然而,正是由于“泛价值”有向量的可加性与“泛物”有向性的二值性,启示我们研究一种既有二值有向性、又有可加性的认知量。一维空间的有向距离,二维空间的有向面积,三维空间、乃至一般的N维空间的有向体积等都是这种几何量的例子。一般地,我们把带有方向的度量称为有向度量。态势感知中态一般是“泛事实”的有向性,势是“泛价值”的有向性,感一般是“泛事实”的有向性,知是“泛价值”的有向性。人机关系有点像量子纠缠,常常不是“有或无”的问题,而是“有与无”的问题。有无相生,“有”的可以计算,“无”的可以算计,“有与无”的可以计算计,所以未来的军事人机混合指控系统中,一定要有人类参谋和机器参谋,一个负责“有”的计算,一个处理“无”的算计,形成指控“计算计”系统。既能从直观上把握事物,还能从间接中理解规律。
西方发展起来的科学侧重于对真理的探求,常常被分为两大类:理论的科学和实践的科学。前者的目的是知识及真理,后者则寻求通过人的行动控制对象。这两者具体表现在这样一个对真理的证明体系的探求上:形式意义上的真理(工具论——逻辑),实证意义上的真理(物理——经验世界),批判意义上的真理(后物理学——形而上学)。俞吾金先生认为:“迄今为止的西方形而上学发展史是由以下三次翻转构成的:首先是以笛卡尔、康德、黑格尔为代表的“主体性形而上学”对柏拉图主义的“在场形而上学”的翻转;其次是在主体性形而上学的内部,以叔本华、尼采为代表的“意志形而上学”对以笛卡尔、康德、黑格尔为代表的“理性形而上学”的翻转;再次是后期海德格尔的“世界之四重整体(天地神人)的形而上学”对其前期的“此在形而上学”的翻转。”通过这三次翻转,我们可以引申出这样的结论:智能是一种人机环境系统交互,不但涉及理性及逻辑的研究,还包括感性和非逻辑的浸入,当前的人工智能仅仅是统计概率性混合了人类认知机理的自动化体系,还远远没有进入真正智能领域的探索。若要达到真正的智能研究,必须超越现有的人工智能框架,老老实实地把西方的“真”理同东方的“道”理结合起来,形成事实与价值、人智与机智、叙述与证明、计算与算计混合的计算计系统。
自此,真正的智能将不仅能在叙述的框架中讲道理,而且还应能在证明的体系中讲真理;不仅能在对世界的感性体验中言说散文性的诗性智慧以满足情感的需要,而且能在对世界的理智把握中表达逻辑性的分析智慧以满足科学精神的要求,那时,智能才能真正克服危机——人性的危机。
当前制约机器人科技发展的瓶颈是人工智能,人工智能研究的难点是对认知的解释与建构,而认知研究的关键问题则是自主和情感等意识现象的破解。生命认知中没有任何问题比弄清楚意识的本质更具挑战性,或者说更引人入胜。这个领域是科学、哲学、人文艺术、神学等领域的交集。意识的变化莫测与主观随意等特点有时严重偏离了追问人工智能:科学技术的逻辑实证与感觉经验验证判断,既然与科学技术体系相距较远,自然就不会得到相应的认同与支持了,顺理成章,理应如此吧!然而,最近科技界一系列的前沿研究正悄悄地改变着这个局面:研究飘忽不定的意识固然不符合科技的尺度,那么在“意识”前面加上“情境”(或“场景”、“上下文”、“态势”)二字呢?人在大时空环境下的意识是不确定的,但“格物致知”一下,在小尺度时空情境下的意识应该有迹可循吧!自古以来,人们就知道“天时地利人和”的小尺度时空情境对态势感知及意识的影响,只是直至 1988年,才出现了明确用现代的科学手段实现情境(或情景)意识的研究,即米卡·安德斯雷(Mica Endsley)提出的态势感知概念框架。但这只是个定性分析概念模型,其机理分析与定量计算还远远没有完善。
在真实的人—机—环境系统交互领域中,人的情景意识、机器的物理情景意识、环境的地理情景意识等往往同构于统一时空中(人的五种感知也应是并行的),人注意的切换使之对于人而言发生着不同的主题与背景感受 / 体验。在人的行为环境与机的物理环境、地理环境相互作用过程中,人的情景意识被视为一个开放的系统,是一个整体,其行为特征并非由人的元素单独决定,而是取决于人—机—环境系统整体的内在特征,人的情景意识及其行为只不过是这个整体过程中的一部分罢了。另外,人机环境中许多个闭环系统常常是并行或嵌套的,并且在特定情境下这些闭环系统的不同反馈环节信息又往往交叉混合在一起,起着或兴奋或抑制的作用,不但有类似宗教情感类的柔性反馈,不妨称之为软调节反馈,人常常会延迟控制不同情感的释放;也存在着类似法律强制类的刚性反馈,不妨称之为硬调节反馈,常规意义上的自动控制反馈大都属于这类反馈。如何快速化繁为简、化虚为实是衡量一个人机系统稳定性、有效性、可靠性大小的主要标志,是用数学方法的快速搜索比对还是运筹学的优化修剪计算,这是一个值得人工智能领域深究的问题。
人—机—环境交互系统往往由有意志、有目的和有学习能力的人的活动构成,涉及变量众多,关系复杂,贯穿着人的主观因素和自觉目的,所以其中的主客体界限常常模糊,具有个别性、人为性、异质性、不确定性、价值与事实的统一性、主客相关性等特点,其中充满了复杂的随机因素的作用,不具备重复性。另外,人—机—环境交互系统有关机(装备)、环境(自然)研究活动中的主客体则界限分明,具有较强的实证性、自在性、同质性、确定性、价值中立性、客观性等特点。在西方国家,无论是在古代、中世纪还是在现代,哲学宗教早已不单纯是意识形态,而是逐渐成为各个阶级中的强大政治力量, 其影响不断渗透到社会生活的各个领域,更有甚者,把哲学、政治、法律等上层建筑都置于宗教控制之下。总之,以上诸多主客观元素的影响导致了人—机—环境交互系统的异常复杂和不确定性。所以,对人—机—环境交互系统的研究不应仅仅包含科学的范式,如实验、理论、模拟、大数据,还应涉及人文艺术的多种方法,如直观、揣测、思辨、风格、图像、情境等,在许多情况下还应与哲学宗教的多种进路相关联,如现象、具身、分析、理解与信仰等。
在充满变数的人—机—环境交互系统中,存在的逻辑不是主客观的必然性和确定性,而是与各种可能性保持互动的同步性,是一种得“意”忘“形”的见招拆招和随机应变能力。这种思维和能力可能更适合人类的各种复杂艺术过程。对此种种,恰恰是人工智能所欠缺的地方。
人机智能是人—机—环境系统相互作用而产生的新型智能系统。其与人的智慧、人工智能的差异具体表现在三个方面:首先,在混合智能输入端,它把设备传感器客观采集的数据与人主观感知到的信息结合起来,形成一种新的输入方式;其次,在智能的数据/信息中间处理过程,机器数据计算与人的信息认知相混合,构建起一种独特的理解途径;最后,在智能输出端,它将机器运算结果与人的价值决策相匹配,形成概率化与规则化有机协调的优化判断。人机混合智能是一种广义上的“群体”智能形式,这里的人不仅包括个人,还包括众人,机不但包括机器装备,还涉及机制机理;此外,还关联自然/社会环境、真实/虚拟环境、网络/电磁环境等。
2、有关人机几个问题的思考
(1)人机环中是不是要先考虑任务目标,任务的模型该考虑哪些关键要素?
从多维度到边维度,从多尺度到变尺度,从多关系到变关系,从多推理到变推理,从多决策到变决策,从多边界条件到变边界条件。计算-算计相互作用的整合法则(线性与非线性的整合)。神经中的序可以装任何东西,并可进行泛化成新的序。任务需求是智能的目的,一切行为都是任务和目标驱动的。任务的模型最基础的是5W2H(who、where、when、what、why、how、how much),并结合各服务领域的关键要素展开,进行事实性与价值性混合观察、判断、分析、执行。(2)人机混合是不是要对人、机建模?若是,人和机的模型,要考虑哪些关键因素?
人和机的混合肯定是基于场景和任务(事件)的,要考虑输入、处理、输出、反馈、系统及其影响因素等,具体如下:a、客观数据与主观信息、知识的弹性输入——灵活的表征;b、公理与非公理推理的有机混合——有效的处理;c、责任性判断与无风险性决策的无缝衔接——虚实互补的输出;d、人类反思与机器反馈之间的相互协同调整;e、深度态势感知与其逆向资源管理过程的双向平衡;f、人机之间的透明信任机制生成;g、机器常识与人类常识的差异;h、人机之间可解释性的阈值;i、机器终身学习的范围/内容与人类学习的不同。
(3)人机混合(人机高效协作)的衡量的关键指标?
粗略地说,可分别从人、机和任务三个方面研讨:人机环境系统高效协同的关键指标在于三者运行绩效中的反应时、准确率,具体体现在计划协同,动作协同,特别是跨组织实现步调上的协同,当然还有资源、成本的协同等等方面。比如人的主动、辩证、平衡能力,机的精确、逻辑、快速功能,任务的弹性、变化、整体要求。如何有机地把人、机、任务的这些特点融入到系统协同的反应时、准确率两大指标之中呢?又是一个关键问题。
(4)从认知工程的智能系统框架、以及中西方的基础理论来看,哪些是未来认知功能具备可工程化的能力框架?哪些是尚不具备工程化的认知功能?
简单的说就是:计算部分与算计部分之分。未来认知功能具备可工程化的能力框架在于软硬件计算功能的快速、精确、大存储量的进一步提高,尚不具备工程化的认知功能在于反映规划、组织、协同算计谋划能力的知几趣时变通得到明显改善。智,常常在可判定性领域里存在;能,往往存在于可计算性领域。认知工程的瓶颈和矛盾在于:总想用逻辑的手段解决非逻辑问题,例如试图用形式化的手段解决意向性的问题。不同的人机其任务上下文中的上下程度弹性也是不同的。计算是算计的产物,计算常是算计的简化版,不能体现出算计中主动、辩证、矛盾的价值。计算可以处理关键场景的特征函数,但较难解决基本场景的对应规则,更难对付任意场景的统计概率,可惜这些还仅仅只是场景,尚远未涉及情境和意识……计算常常是针对状态参数和属性的(客观数据和事实),算计则是一种趋势和关系之间的谋划(根据主观价值的出谋划策),所以态势感知中,态与感侧重计算推理,势和知偏向算计谋划。计算计最大的特点就是异、易的事实价值并行不悖。人类的符号、联结、行为、机制主义是多层次多角度甚至是变层次变角度的,相比之下,机器的符号、联结、行为、机制主义是单层次单角度以及是固层次固角度的。人类思维的本质是随机应变的程序,也是可实时创造的程序,能够解释符号主义、联结主义、行为主义、机制主义之间的联系并能够打通这些联系,实现综合处理。达文波特认为:人类的某种智能行为一旦被拆解成明确的步骤、规则和算法,它就不再专属于人类了。这在根本上就涉及到一个基本问题,即科学发现如何成为一个可以被研究的问题。
三、什么是人机混合智能
人工智能的优势在于庞大的信息存储量和高速的处理速度,但是无法处理如休谟之问,即从“是”(being)能否推出“应该”(should),也即“事实”命题能否推出“价值”命题;也无法处理情感的表征问题。人工智能尝试通过大数据与逐步升级的算法实现人的情感与意指依旧没有办法实现跨越。
人工智能是一种返回修改模式。也就是说,一组代码解决一个问题,以前是代码执行,问题没处理好就拉倒,程序结束。人工智能是代码执行,问题没处理好,代码自动返回修改数据代码再执行。反复修改,也就是反复学习,这就是人工智能。当然,好的人工智能技术,在一定范围内可以自己修改不足的模型,进而可以在一定程度上模拟人的具体功能,比如人类的部分计算、逻辑推理能力,但它对人类“非家族相似性”的类比、决策能力还无能为力。所以人工智能中的“人”并不是真的“人”。
人工智能有限的理性逻辑和困难的跨域能力是其致命的缺陷。人工智能无法理解相等关系,尤其是不同事实中的价值相等关系;人工智能也无法理解包含关系,尤其是不同事实中的价值包含关系(小可以大于大,有可以生出无)。人可以用不正规不正确的方法和手段实现正规正确的目的,还可以用正规正确的方法和手段实现不正规正确的意图。还有,人可以用普通的方法处理复杂的问题,还可以(故意)用复杂的方法解答简单的问题。
从人工智能的特点及缺点中,我们不难看出:人的思维很难在人工智能现有的理论框架中得到解释。那该如何做才有可能寻找到一条通往智能科学研究光明前程之道呢?下面我们将针对这个问题展开最底层的思考和讨论。
人工智能之父图灵的朋友和老师维特根斯坦在他著名的《逻辑哲学论》第一句就写道:“世界是事实的总和而非事物的总和”,其中的事实指的是事物之间的关涉联系---关系,而事物是指包含的各种属性,从目前人工智能技术的发展态势而言,绝大多数都是在做识别事物属性方面的工作,如语音、图像、位置、速度等等,而涉及到事物之间的各种关系层面的工作还很少,但是已经开始做了,如大数据挖掘等。在这眼花缭乱的人工智能技术中,人们常常思考着这样一个问题:什么是智能?智能的定义究竟是什么呢?
关于智能的定义,有人说是非存在的有,有人说是得意忘形,有人说是随机应变,有人说是鲁棒适应,有人说,可能有一百个专家,就有一百种说法。实际上现在要形成一个大家都能接受的定义是不太可能的。但是这并不影响大家对智能研究中的一些难点、热点达成一致看法或共识。比如信息表征、逻辑推理和自主决策等方面。
有了数据和信息之后,智能的信息处理架构就格外的重要,到目前为止,有不少大家提出了一些经典的理论或模型,例如在视觉领域,David Marr的三层结构至今仍未许多智能科技工作者所追捧。作为视觉计算理论的创始人Marr认为:神经系统所作的信息处理与机器相似。视觉是一种复杂的信息处理任务,目的是要把握对我们有用的外部世界的各种情况,并把它们表达出来。这种任务必须在三个不同的水平上来理解,这就是:a. 计算理论 b. 算法 c. 机制(见表1)。
表1 David Marr计算视觉的三层结构
计算理论 | 算法 | 机制 |
信息处理问题的定义,它的解就是计算的目标。这种计算的抽象性质的特征。在可见世界内找出这些性质,构成这个问题的约束条件。 | 为完成期望进行的计算所采用的算法的研究。 | 完成算法的物理实体,它由给定的硬件系统构成.机器硬件的构架。 |
Marr早先提出的一些基本概念在计算理论这一级水平上已经成为一种几乎是尽善尽美的理论。这一理论的特征就是它力图使人的视觉信息处理研究变得越来越严密,从而使它成为一门真正的科学。
当前,在解释人类认知过程工作机理的理论中,由卡耐基梅隆大学教授John Robert Anderson提出的ACT-R(Adaptive Control ofThought–Rational ,ACT-R)模型被认为是非常具有前途的一个理论。该理论模型认为人类的认知过程需要四种不同的模块参与,即目标模块、视觉模块、动作模块和描述性知识模块。每一个模块各自独立工作,并且由一个中央产生系统协调。ACT-R的核心是描述性知识模块和中央产生系统。描述性知识模块存储了个体所积累的长期不变的认识,包括基本的事实(例如“西雅图是美国的一座城市”)、专业知识(例如“高速铁路交通信号控制方案的设计方法”)等。中央产生式系统存储了个体的程序性知识,这些知识以条件-动作(产生式)规则的形式呈现,当满足一定条件时,相应的动作将被对应的模块执行,产生式规则的不断触发能够保证各个模块相互配合,模拟个体做出的连续认知过程。ACT-R是一种认知架构,用以仿真并理解人的认知的理论。ACT-R试图理解人类如何组织知识和产生智能行为。ACT-R的目标是使系统能够执行人类的各种认知任务,如捕获人的感知、思想和行为。
无论是David Marr的三层结构计算视觉理论,还是John Robert Anderson提出的ACT-R理论模型,以及许多解释和模拟人类认知过程的模型都存在一个共同的缺点和不足,即不能把人的主观参数和机器/环境中的客观参数有机地统一起来,模型的弹性不足,很难主动地产生鲁棒性的适应性,更不要说产生情感、意识等更高层次的表征和演化。当前的人工智能与人相比除了在输入表征和混合处理方面的局限外,在更基本的哲学层面就存在这先天不足,即回答不了休谟问题。
休谟指出,由因果推理获得的知识,构成了人类生活所依赖的绝大部分知识。休谟问题表面上是一个著名的哲学难题,实际上更是一个人工智能的瓶颈和难点,当把数据表征为信息时,能指就是相对客观表示being,而所指就是主观表达should。
从认识论角度,“应该”就是从描述事物状态与特征的参量(或变量)的众多数值中取其最大值或极大值,“是”就是从描述事物状态与特征的参量(或变量)的众多数值中取其任意值。从价值论角度,“应该”就是从描述事物的价值状态与价值特征的众多参量(或变量)中取其最大值或极大值,“是”就是从描述事物价值是状态与价值特征的参量(或变量)的众多数值中取去其任意值。
由于受偏好习惯风俗等因素的影响,即使是人类的认识论和价值论也经常出现非因果归纳和演绎(比如严格意义上而言,从“天行健”这个事实(being)命题是不能推出“君子必自强不息”这个价值观(should)命题的,但是随着时间的延续,这个类比习惯渐渐变成了有些因果的意味。人工智能的优势不仅在于存储量大计算速度快,更重要的是它还可以从源头没有偏见的头脑和认知封闭,但是要处理类似虽是由人类提出的但仍远远不能完美回答的休谟问题恐怕还是强机所难吧!人工智能如果有一定的智能,恐怕更多的应是数字逻辑语言智能,在特定场景既定规则和统计又既定输出的任务下可以极大提升工作效率,但在有情感、有意向性的复杂情境下仍难以无中生有、随机应变。未来智能科学的发展趋势必将会是人机智能的不断混合促进。
人机混合智能理论着重描述一种由人、机、环境系统相互作用而产生的新型智能形式,它既不同于人的智能也不同于人工智能,它是一种物理性与生物性相结合的新一代智能科学体系。人机交互技术主要涉及人脖子以下的生理心理工效学问题,而人机混合智能主要侧重人脖子以上的大脑与机器的“电脑”相结合的智能问题。人机混合智能在以下三个方面不同于人的智能与人工智能不同:在智能输入端,人机混合智能的思想不单单依赖硬件传感器采集的客观数据或是人五官感知到的主观信息,而是把两者有效地结合起来,并且联系人的先验知识,形成一种新的输入方式;其次是在信息的处理阶段,也是智能产生的重要阶段,将人的认知方式与计算机优势的计算能力混合起来,构建起一种新的理解途径;最后是在智能的输出端,将人在决策中体现的价值效应加入计算机逐渐迭代的算法之中相互匹配,形成有机化与概率化相互协调的优化判断。在人机混合的不断适应中,人将会对惯性常识行为进行有意识地思考,而机器也将会从人的不同条件下的决策发现价值权重的区别。人与机器之间的理解将会从单向性转变为双向性,人的主动性将与机器的被动性混合起来。人处理其擅长的“应该”(should)等价值取向的主观信息,而机器不仅处理其擅长的“是”(being)等规则概率的客观数据,同时也将从人处理“应该”(should)信息中优化自己的算法,从而产生人+机器既大于人也大于机器的效果。
人机混合采用分层的体系结构。人类通过后天完善的认知能力对外界环境进行分析感知,其认知过程可分为记忆层意图层,决策层、感知与行为层,形成意向性的思维;机器通过探测数据对外界环境进行感知分析,其认知过程分为目标层知识库,任务规划层、感知与执行层,形成形式化的思维。相同的体系结构指明人类与机器可以在相同的层次之间进行混合,并且在不同的层次之间也可以产生因果关系。图1为人机混合的示意图。
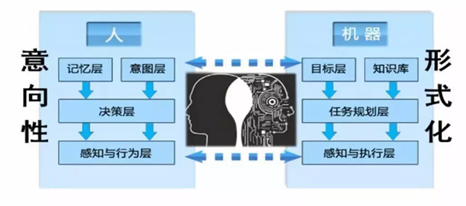
图1人机混合智能
人机混合智能,简单地说就是充分利用人和机器的长处形成一种新的智能形式。任何新的事物都有其产生的源泉,人机混合智能也不例外,人机混合智能主要起源于人机交互和智能科学这两个领域,而这两个领域起源都与英国剑桥大学有着密切的关系:1940年夏,当德国轰炸机飞向伦敦之际,人机交互与智能科学的研究序幕就被徐徐拉开。英国人为了抵御德国人的进攻,开始了雷达、飞机、密码破译方面的科技应用工作,当时在剑桥大学圣约翰学院建立了第一个研究人机交互问题的飞机座舱(即著名的Cambridge Cockpit)以解决飞行员们执行飞行任务时出现的一些错误和失误,另外剑桥国王学院的毕业生图灵领导了对德军“恩尼格玛”密电文的破译……事实上,早在19世纪,剑桥大学的查尔斯·巴贝奇和阿达·奥古斯塔(剑桥大学毕业的诗人拜伦的女儿,世界第一位程序员)就开始合作机械计算机软硬件的研制,20世纪之后,数学家罗素、逻辑学家维特根斯坦(图灵的老师和朋友)都对智能科学的起源和发展做出了重大的贡献。当前人机智能混合领域比较火的两位深度学习之父辛顿曾是剑桥大学心理系的学生、阿尔法狗之父哈撒比斯本科是剑桥计算机系毕业的。
在人机智能混合时,有一件事非常重要,就是这个人要能够理解机器如何看待世界,并在机器的限制内有效地进行决策。反之,机器也应对配合的人比较“熟悉”,就像一些体育活动中的双打队友一样,如果彼此间没有默契,想产生化学变化般的合适混合、精确协同就是天方夜谭。有效地人机智能混合常常意味着将人的思想带给机器,这也就意味着:人将开始有意识地思考他通常无意识地执行的任务;机器将开始处理合作者个性化的习惯和偏好;两者都还必须随时随地地随环境的变化而变化……高山流水,电脑与心灵相互感应,充分发挥两者的优点和长处,如人类可以打破逻辑运用直觉思维进行决策、机器能够检测人类感觉无法检测到的信号能力等等。人类所理解的每一个命题,都必定是全然是由我们所获知的各种成分所组成的。
人机混合智能机制、机理的破解将成为未来战争致胜的关键。任何分工都会受规模和范围限制,人机混合智能中的功能分配是分工的一部分,另外一部分是能力分配。功能分配是被动的,外部需求所致;能力分配是主动的,内部驱动所生。在复杂、异质、非结构、非线性数据/信息/知识中,人的或者是类人的方向性预处理很重要,当问题域被初步缩小范围后,机器的有界、快速、准确优势便可以发挥出来了;另外,当获得大量数据/信息/知识后,机器也可以先把他们初步映射到几个领域,然后人再进一步处理分析。这两个过程的同化顺应、交叉平衡大致就是人机有机混合的过程。
未来的关键就在于人机混合的那个“恰好”!阴阳鱼中间的那条S形分隔线,无论怎样机器是不可能创造出意识来的,机器再多再大,也只是源自半个世界,小半个的世界。
四、计算-算计模型
1、计算简述
理解知识是理解智能的源头。古代中外哲学家注意到术语、名词、概念的内容是因人而异的。例如老子曾说“道可道,非常道;名可名,非常名”。柏拉图也曾认识到,语言和概念的模糊性和易变性难以描述永恒不变的实体。但是哲学家们在知识的不确定中也在尝试解释宇宙万物的统一性,认为存在一种永恒的,普适的,客观的自然规律,道家把它称为“道”或“太一”。而柏拉图发明了“理念”,“形式”,并且正式提出同一性问题。这也标志着哲学的诞生。柏拉图在此基础上提出的诸多问题主宰者2000年的哲学潮流,诞生了诸多学说,但是意见的意见仍然是意见。导致这种意见众多却无法解释的现象,原因在于没有解决问题的工具。
建造测量理性和思维的工具,从亚里士多德的三段论系统开始。通过给定的初始前提,三段论系统可以推导出结论。但由于亚里士多德提出的该逻辑较为粗糙,无法表述有价值的逻辑推理。随后,数学家们在逻辑,计算,概率论,博弈论中的研究工作,不仅提高了人类的生产水平与认知水平,而且为现阶段的人工智能提供了工具。19世纪,布尔提出了布尔逻辑,即命题逻辑,随后,弗雷格扩展了布尔逻辑,创建了一级谓词逻辑。通过引入关系谓词符号、变量以及量词,就能表述演绎规则。当人类将焦点聚集在弗雷格逻辑时,发现了若干漏洞,其中一个漏洞是没有把逻辑概念与集合论概念分解开。为此,希尔伯特在20世纪20年代去掉了罗素逻辑(罗素曾完善弗雷格逻辑的“说谎者”漏洞)中所有专门针对集合概念的部分,专门构建了“谓词逻辑”并沿用至今。因此,如希尔伯特所说,数学无需再用数字,几何图形等传统研究符号来描述,甚至可以用啤酒,凳子等毫无关联的符号来研究数学。通过抽象符号,用逻辑证明来定义数学,由此数学变成一种普适逻辑。1908年,策梅洛专门针对集合论提出公理。1930年,哥德尔证明任何理论可以转化为集合论,使得集合论本身具有了本体论中立性。
随后,希尔伯特提出了算法的判定性问题:有没有一种算法,能够判定在谓词逻辑下的命题是否可以证明成立?1936年,丘奇,图灵,克莱尼分别独立证明,这样的算法是不存在的。由此推理出停机问题无法用算法解决。对于希尔伯特判定性问题而言,不存在判定一个谓词逻辑命题是否可证明的算法。这一定量被称作丘奇定理。换而言之,其说明了计算和推理是两码事:某些数学问题无法用计算解决,只能通过推理解决。丘奇、图灵定义的“λ演算”和“图灵机”就是通用计算,这一观点也被称为“丘奇——图灵论题”。1978年,英国数学家、逻辑学家甘迪提供了丘奇论题的物理形式证明。他假设:a. 信息的密度是有限的;b. 信息的传输速度是有限的。在经典的三维空间中,“丘奇——图灵论题”的物理形式是成立的。甘迪的论证说明大自然之所以被数学化,仅仅因为信息的密度和传播速度是有限的。联想到相对论关于光速有限的假设以及最小作用量原理,这样的结论在令人惊奇之余又不违反物理原则。因此,我们可以用算法来进行各种学科和知识的探索,并以人工智能的方式出现在今天的科研、制造、生产、商业、服务和消费行为中的原因。
现有的人工智能技术均是依赖于现有的计算体系,达到模仿人类心智的人工智能体系还未建立。在现有的计算体系下,人工智能能够表征一部分人类理性思维特质,而非理性,甚至非逻辑性的思维特性如何表征,是人工智能发展的一大突破口。
2、算计简述
算计本质上是人类没有数学模型的计算。计算的局限性无法通过图灵机突破,所以对人的非理性、非逻辑思维解构与在机器上的重建就有非凡的意义。从对人的认知模式的理解,尝试解释人的认知能力和构建出能学习、推理的认知模型,已经在一些应用领域取得不错的效果。再后来的对意识的理解构建出的意识图灵机【8】在处理问题时能做到其思维过程的意识觉知。即便如此,我们对人类的思维过程的模仿依然显得很拙劣,对人类的直觉、灵感、顿悟等能力的模拟还是没有好的方案,更别说人类特有的责任、价值的理解。
(1)认知模型
认知模型是对人类认知能力的理解并在次基础上构建的模拟人的认知过程的计算模型。这里认知模型中的认知能力通常包括感知、表示、记忆与学习、语言、问题求解和推理等方面【9】。为了能够构建出更加智能的机器,我们便希望从人的身上寻找灵感,同时也是更好地探索和研究人的思维机制,特别是人对周围信息的感知处理机制,进而可为打造出真正的人工智能系统提供新的体系结构和技术方法【10】。Duch【11】根据记忆和学习的不同将现有的认知模型分为三类:符号化(Symbolic)认知模型、浮现式(Emergent)认知模型和混合型(Hybrid)认知模型三种。粗略地讲,符号化认知模型侧重于利用高阶符号和陈述性知识,采用传统人工智能的自上而下的分析方法来处理信息,如SOAR、EPIC、NARS等;浮现式认知模型则利用低水平的激活信号流经由无数处理单元组成的网络,采用一种自下而上的处理,这种处理依赖于浮现式自组织属性和连接属性,如IBCA、NOMAD等;混合型认知模型则将这两种方式结合起来,具备符号化认知模型和浮现式认知模型的某些特点,如ACT-R、LIDA、4CAPS等。
(2)意识图灵机
意识图灵机 (Conscious Turing Machine, CTM)的灵感来源于图灵的简单而强大的图灵机。与前文提到的对大脑或者思维认知的构建提出的认知模型不同,意识图灵机是针对意识的构建的简单数学模型。认知神经科学家巴尔斯提出的全局工作空间理论【12】概述了对意识的理解,再有一些脑中神经相关物的研究,基于此布鲁姆提出了意识图灵机。意识图灵机能够在处理信息过程中对意识内容产生意识觉知,能够体验感觉而不仅仅是模拟感觉,提出这些感觉产生的可能方式,如痛苦和快乐。意识图灵机适合对其所做的高级决策做出解释,这就为人工智能的不可解释性问题的解决提供了思路。另外,我们认为在意识图灵机中有意识和自由意志的感觉,以及幻觉和梦境的体验。
(3)算计
人机混合智能系统不仅需要机器的强计算能力,更重要的是人的智慧,是一种理性与非理性、机的计算与人的算计深入混合的智能系统。机的客观数据采集输入、逻辑推理和决策输出已经在应用中大展拳脚,而对于人的认知决策过程还需要进一步理解建模,才能实现算计能力。
算计也即盘算,筹划谋算;对事情的经过或结果进行仔细而从容的反复思考;考虑。近义词为:权衡、谋略、谋划、打算、计划、筹划、策画、企图、准备、预备、筹算。算计也即人们对于做什么之慎思斟酌,对应于英语中的deliberations,weigh up,weighings,plans,strategies。
认知是人获取和应用知识的过程,知识图谱是人对客观世界的各要素之间的理解进而尝试表示的一种形式,在目前的人工智能应用中已有良好的表现。在简单问答数据集上的问答能力已经可以和人类相媲美,但是对于复杂的问题依然无能为力。这是因为复杂问题需要多跳的表征和推理。在算计中,与计算上仅仅依靠硬件传感器采集到的数据进行输入、表示过程不同,算计需要基于目标驱动和价值驱动对数据进行动态表征。如今的深度学习系统中并没有恒定的知识表征,对不同的学习数据就会有不同的表征形式,并没有基于其自身的原点对数据进行不同事实甚至责任、价值的划分。而人类的大脑中存在“参考系”的恒定表征(参考系为位于大脑皮层的上层),人类是基于自身的观念如欲望、义务对于不同的事实数据进行表征理解。在计算、算计的不同表征中,连续特征空间为人(算计)的认知内容,离散语义符号空间代表机(计算)的感知系统,二者之间还应存在一种连续的准语义空间。我们可以通过上升(raising)操作将连续空间中的特征表征迁移到准语义空间中,进而通过抽象操作将准语义空间中的表征迁移到离散语义符号空间中。反过来,我们可以通过嵌入、投影,将离散语义符号空间中的表征迁移到连续特征空间。这样一来,我们就构建了一种感知、认知相结合的通道。数学的表征常常涉及具体事实抽象化,其推理内容则严格按照逻辑来进行,这当然不可或缺,但总是有非理性非逻辑的存在。简单问题,通过一定知识图谱表示和问题求解程序在现今的人工智能系统下就能实现求解,但复杂问题往往需要多跳的推理。这种多跳的推理不仅是计算中的映射,更重要的是一些非逻辑的漫射(如发散思维)、影射(如联想想象)等。人类的推理常常具有试探性,是经过多次试错、根据结果反馈而又校准之后进行下一步实施,而现有的人工智能的逻辑推理缺乏这种主动的试错性,这就在最后的决策过程上使得效果欠佳。有人提出了基于图的可解释认知推理框架,即以图结构为基础,将逻辑表达用作对复杂问题的分析过程,从而表示成显示的推理路径。可是图的结构化必然会过滤掉一些非结构化的隐信息,是可以一定程度上解释迁移性,但更像是一种“硬解释”,似乎整个结构就是为了推理过程服务。算计的弹性推理不仅需要知识驱动和数据驱动的联合,更有价值和责任的引领,这样在推理过程中才会有非理性的洞见、直觉等表达。计算的决策输出则是根据逻辑推理的结果或者大数据、概率的优化产生,而算计却可做出一些不合逻辑的意向性表达。计算的处理是从事实到新的事实,而算计则是可以实现从事实通过动态表征和弹性推理实现价值体现。
3、计算-算计模型
本文根据现有的计算及认知领域成果,提出计算-算计模型,如图2所示。这里有个前提,由人、机、环境构成的系统智能不仅仅包涵数学、计算机科学、心理学、哲学等领域,它还涉及到其它诸多学科混合的复杂系统。既具有“确定性”,同时也具有“随机性”。在此,本文不对人机环系统进行更加细致的客观描述,只是对其进行可行性的模型预测。
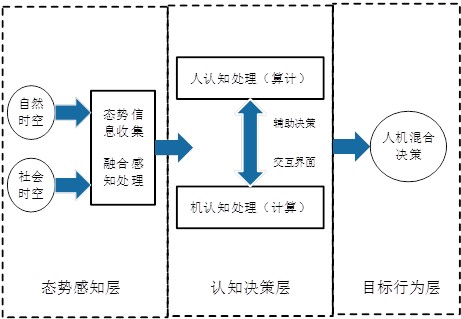
图2 计算-算计模型图
态势感知层内包含环境信息。环境包括自然时空与社会时空内的环境,一切问题的源头来自于自然与社会,也可以说人类知识的来源也是如此,此环境包含了确定以及不确定的成分。除此之外,态势感知层还负责态势信息的收集与感知处理。数学领域的微积分类似于这一过程,通过将已知数据进行处理,从而接近问题答案。指挥与控制领域的情报收集与分析领域同样是对信息的感知处理,相对于数字与微积分符号,情报的量化更加复杂,更多的是交由经验丰富的指挥员处理。传统的自动化方法及机器学习算法可能会导致“回路外”错误,因为人类对任务的态势感知度较低,因为人类对任务以及环境的感知有很大程度基于经验,使容易产生自满情绪或缺乏警惕性。环境的不确定反馈也会对回路外的问题产生影响,这凸显了在紧密结合与松散结合的人机环交互之间实现平衡的重要性。当前,算法处理后的数据可解释性下降,使得人类困于“回路外”,同时也产生人类对智能代理的(agent)信任度下降问题。
认知决策层类似于对态势感知信息的深加工,其不仅仅取决于人的传统意义上的认知,同时也需要机器推理的能力。人类的推理基于直觉,逻辑,关联等认知能力。算计的思想包含于其中。20世纪80年代专家系统盛行,基于人工智能的专家系统风靡一时,机器可以进行简单的问答,但是问答内容局限性较强。主要原因除了计算能力外,还有机器被授予的推理能力基于一对一,一对多,多对一的知识映射关系。如何实现在动态表征下的弹性推理,在具备足够硬件算力条件下是值得被考虑的问题。并且将动态表征下的知识进行散射、漫射、影射,实现多跳推理,是实现该问题的关键。模糊逻辑提供一个或多个连续状态变量映射至相应类别进行推理和决策的框架;神经网络利用程序,在大型典型案例数据库的训练过程中学习到的可变互联权重来进行的知识表达的算术框架;遗传与进化算法在进化遗传学的启发下,采用重复仿真的方法,缩小潜在的选项范围,选择最优解决方案。人类通过人机交互界面与机器交互,机器给予人类辅助决策。实现机件人化是人机混合中迈出的一大步。
目标行为层主要体现在人机混合决策。当出现更高水平的智能体时,人类永远处于决策的最高层,这是在许多领域达成的共识(在目标追求低人力成本条件下例外)。意义建构是对真实世界中的生存至关重要,很多研究表明人类努力建构这个世界中的对象,事件和态势的意义。人类较为擅长迹象解读,对人类而言,建构是一种心理活动。为了使得机器有效与人类合作,机器与人类的反应与决策应当将相同对象、事件或态势解读为相同的迹象,或者获得相同的意义。机器的辅助决策在必要时刻同样需要提供更完整的意义建构,达到人机混合决策的目标。
4、逻辑压缩与坍塌
逻辑的线性可以叠加处理,但逻辑的非线性却变化多端,具体可表现为:发散收敛(弥聚)、跳跃协同(跳协)、显性隐性(显隐)。
公理不是真理,而是某种协议,是一种非存在的有,如东方的孙悟空和西方的圣诞老人一般:虽不存在,但人们心中都“有”其形象。数学是由多个公理(非存在的有)建筑起来的逻辑体系,如点、线、面的概念、无穷等。智能中的逻辑压缩也许是多种事实性逻辑被压缩成价值性逻辑的过程。这在一定程度上也超越了当前数学计算验证体系的边界,而这恰恰也是人类算计的特长:能够自主调和融洽各种事实性逻辑矛盾于某种价值性逻辑之中。
哲学上讲,客观世界完全独立于主观世界的存在,但是这是个伪命题,并不是真正存在的。真正能观察到的,是客观和主观之间的结合,由于观察者和被观察的世界相互作用,我们不可能无穷精准地把客观世界了解清楚。或许当硬件能力到达一定程度,大家就会关注软件能力的提高,当软件能力到达一定程度,人们就会关注人件能力的提高。
衡量一个人的智能水平可以尝试从他“跨”、“协”不同领域能力的速度和准确性来初步判断,同理可得,衡量一台机的智能水平也可以尝试从它“跨”、“协”不同领域能力的速度和准确性来初步判断,衡量一群人机的混合智能水平也可以尝试从ta们“跨”、“协”不同领域能力的速度和准确性来初步判断。简单地说,计算机处理问题的方式是产生式的(if-then),计算计则是启发式的(不求最优但求满意),而启发式往往可以处理非线性问题。或许,启发式的计算计恰恰就是逻辑压缩成功与否的关键之所在吧!当人机在异常复杂的环境里无能为力之时,也许就是逻辑坍塌之际……当然,可以人为制造复杂度造成对方的逻辑坍塌。
五、人机混合智能是博弈智能化的关键
随着深度学习、强化学习等新一代人工智能技术的发展,其在计算机视觉、语音识别、自然语言处理、生物医疗领域及游戏博弈等方面取得很大的突破,人工智能在博弈领域应用也愈加广泛,催生了博弈智能的概念。
博弈智能的不断发展,智能化装备的大量使用,不但将与传统的战争形态从技术上产生巨大的不同,在军事指挥与控制的理论上也将对传统作战制胜机理产生不同程度的颠覆。因此,当前加快军事智能化发展,不仅要继续智能化武器装备的研究,还要提高对智能化战争条件下作战指挥控制理论的研究。军事智能研究是一个领域,不是一个学科,我们必须要用不同的方法论,从不同的角度来研究军事智能,方法论、角度越多,军事智能研究就会做得越好。概况起来以下几个主要问题特别值得关注:
1、人机混合智能中的深度态势感知问题
从表面上看,各国军事智能化发展非常迅速:百舸争流,百花齐放,百家争鸣,一片热火朝天的景象,实际上,各国的军事智能化进程却都存在着一个致命的缺点,就是没能深入地处理人机混合的智能问题,尤其是深度态势感知问题。任何颠覆性科技进步都可回溯到基础概念的理解上,例如人的所有行为都是有目的的,这个目的性就是价值,目的性可以分为远中近,其价值程度也相应有大中小,除了价值性因果推理之外,人比人工智能更为厉害的还有各种变特征、变表征、变理解、变判断、变预测、变执行。严格地说,当前的人工智能技术应用场景很窄,属于计算智能和感知智能的前期阶段,不会主动地刻画出准确的场景和情境,而智能科学中最难的就是刻画出有效的场景或上下文,而过去和现代军事智能化的思路却是训练一堆人工智能算法,各自绑定各自的军事应用场景。
一般而言,这些人工智能技术就是用符号/行为/联结主义进行客观事实的形式化因果推理和数据计算,很少涉及价值性因果关系判断和决策,而深度态势感知中的深度就是指事实与价值的混合,态、势涉及客观事实性的数据及信息/知识中的客观部分(如突显性、时、空参数等),简单称之为事实链,而感、知涉及主观价值性的参数部分(如期望、努力程度等),不妨称之为价值链,深度态势感知就是由事实链与价值链交织纠缠在一起的“双螺旋”结构,进而能够实现有效的判断和准确的决策功能。另外,人侧重于主观价值把控算计,机偏向客观事实过程计算,也是一种“双螺旋”结构。如何实现这两种“双螺旋”结构之间(时空、显著性、期望、努力、价值性等)的恰当匹配,是各国都没有解决的难题。某种意义上说,深度态势感知解决的不仅是人机环境系统中时间矛盾、空间矛盾的突显性,还有事实矛盾、价值矛盾和责任矛盾的选择性。矛盾就是竞争,决策包含冒险。好的态势感知能力就是在混乱中看到秩序、在不可能中看到可能、在黑暗中看到光明……所以,目前智能军事领域的瓶颈还是人机混合智能中的深度态势感知问题。
2、不确定性问题
著名军事理论家克劳塞维茨认为:战争是一团迷雾,存在着大量的不确定性,是不可知的。这里的不可知是不可预知、不可预测,从现代人工智能的发展趋势来看,可预见未来的战争中存在着很多人机混合隐患仍未解决,具体有:1)在复杂博弈环境中,人类和机器是在特定的时空内吸收、消化和运用有限的信息,对人而言,人的压力越大,误解的信息就越多,也就越容易导致困惑、迷茫和意外;对机器而言,对跨领域非结构化数据的学习、理解、预测依然是非常困难的事情。2)战争中决策所需信息在时空、情感上的广泛分布,决定了在特定情境中,一些关键信息仍然很难获取,而且机器采集到的重要客观物理性数据与人类获取的主观加工后的信息、知识很难协调混合。3)未来战争中存在的大量非线性特征和出乎意料的多变性,常常会导致作战过程及结果的诸多不可预见性,基于公理的形式化逻辑推理已远远不能满足复杂多变战况决策的需求。
3、人的问题
“跨域协同”问题从根本上说就是一个“人的问题”。“多域战”、“全域战”、“马赛克战”以及“联合作战”解决“跨域协同”问题的方式方法可以用两个术语来概括。一是聚合(convergence),即“为达成某种意图在时间和物理空间上跨领域、环境和职能的能力集成”;二是系统集成(integration of systems),不仅聚焦于实现“跨域协同”所需的人和流程,还重视技术方案。截至目前,“跨域协同”尚没有承认,当前的系统和列编项目是“烟囱式”的互相独立,跨域机动和火力需要“人”方面的解决方案。随着自动化、机器学习、人工智能等技术的成熟,美军的对手将寻求应用这些技术能力来进一步挑战美国。按照沃克的要求,打破现有的“烟囱式”方案,设计出背后有人机编队做支撑的新方案,是美军的责任。
无论是纵观古今,还是展望未来,各种军事作战装备或系统始终都是一个人-机-环境系统。无论是现在还是未来,无人机、无人车、无人艇等各种无人装备都不可能是完全无人的,只不过是人由前置转为后置,由体力变为智慧,由具体执行变为指挥控制,其中涉及到复杂的人机交互及其相互关系的问题,单纯的人工智能与人类智能都不能使其发挥最大效能,人机智能的混合是其重要的发展方向。准确地说,军事智能不仅包含自然科学和工程技术,还涉及许多社会科学的领域,如人文、哲学、宗教乃至艺术等等,这从世界上最早的兵书之一——《孙子兵法》的英文名字可见一斑:The Art of War,好的军事指挥有时候不仅是技术还是艺术。军事智能是人工智能之冠上的明珠,相对传统的民用人工智能,其对抗性博弈性更强,其智能不仅仅是武器装备的智能更是指挥控制系统的智能,是体系的智能化。未来军事智能的最优存在形态应该不是个体性的(比如异常先进的单平台武器),而是系统性的(网络性的),更有可能是横跨各人机环境系统体系性的(如跨不同网络的陆海空天网体系),并且该体系还会不断自主升级,
2020年5月12日,美国防务专家彼得·希克曼发表了一篇文章 《未来战争制胜的关键在于人》。文章认为,随着战争的性质的不断演变,人工智能将对战争的演变做出重大贡献,但过高估计技术变革的速度和先进技术在未来胜利中所起的作用仍具有风险。过分强调技术将会使竞争对手发现盲点,进而加以利用。追求尖端技术并无问题,但在未来战争中,制胜的关键因素依然是人。事实上,这与毛泽东同志有关人民战争战略思想是一致的:武器是战争的重要因素,但不是决定的因素,决定的因素是人而不是物。
4、未来战争制胜的关键在于人机环境系统的有效协同
如果说“逻辑是符号串的等同或包含关系”,那么非逻辑则是非符号的等同或包含关系。人工智能处理一些逻辑问题较好,而人处理一些非逻辑问题稍优,人机混合则能处理逻辑与非逻辑的混合问题。人工智能在对抗博弈中起重要作用需要几个条件:首先是找到数学定量计算就能解决的部分,其次与人混合过程中使该AI部分找到适当的时机、方式和作用,最后,人做对的事,AI“把事情做对”。
最近,美陆军未来司令部司令约翰·默里上将和陆军其他技术领导人强调“人类”必须最终作出重要决定并掌控“指挥和控制”系统,同时还明确指出快速演化的人工智能武器系统应用可以让陆军指挥人员“率先看到、率先作出决定、率先采取行动”,当然由此能够更快地摧毁敌人。(人工智能的数据处理能力会让人类的决策速度呈现指数级的提高,即提速了OODA环。)仔细想想,任何事物都不会无中生有,凡事都有苗头和兆头,人机混合就是能够及时(恰如其分)地捕捉到这些零零碎碎的迹象和蛛丝马迹,太快太慢都不好,“率先看到、率先做出决定、率先采取行动”,但不一定由此能够更快准确有效地摧毁敌人。有时,慢一点未必不是一个好的选择,太快了也许更容易上当受骗吧!【14】
目前,人智与AI的失调匹配是导致目前人工智能应用领域弱智的主要原因。人可以身在曹营心在汉,是非、01同在:既是又不是,叠加“态”。在危机管理中常常出现的是叠加“势”:危险与机会共生,危中有机,机中有危,两者纠缠在一起。如何因势利导、顺势而为,则是人机混合智能中深度态势感知的关键。人机是非同构的,即本质是不同的两者事物,一个受控实验部分不可重复,一个受控实验普遍可重复。人的智慧也是由受控与不可受控部分、可重复与不可重复部分构成的。色盲者认为是无色的,对他是真的,对其它主体却是假的,若色盲者比正常人多,则正常人会是色盲吗?
科学的缺点在于否认了个性化不受控不可重复的真实。所以基于这种科学性的基础上必然会带来一些缺陷。人,尤其是每个人都是天然的个性化不受控不可重复的主体,你不能说他就是不存在的。从这个角度看,人机混合的实质就是帮助科学完善它的不足和局限。
大数据的优点是受控实验普遍可重复性,如此一来可以寻找共性规律——按图索骥;但是,这也是大数据的一个缺点,容易忽略新生事物——受控实验不可重复部分的出现,表现出刻舟求剑效应。有些受控实验不可重复之真实性也是存在的,但这不在科学范围内。以前是盲人摸象,现在是人机求剑。
对军事智能而言,无论机器学习还是自主系统,都不外乎是为了结合人、机的优点,取长补短、相得益彰,精确地感知、正确地推理和准确地预测,进而达到隐真使假、去伪存真、去粗存精、由此及彼、由表及里,所以,在未来战争中,对人机混合智能机制、机理的破解以及有效的协同方式将成为未来战争致胜的关键。
任何分工都会受规模和范围限制,人机混合智能中的功能分配是分工的一部分,另外一部分是能力分配。功能分配是被动的,外部需求所致;能力分配是主动的,内部驱动所生。在复杂、异质、非结构、非线性数据/信息/知识中,人的或者是类人的方向性预处理很重要,当问题域被初步缩小范围后,机器的有界、快速、准确优势便可以发挥出来了;另外,当获得大量数据/信息/知识后,机器也可以先把他们初步映射到几个领域,然后人再进一步处理分析。这两个过程的同化适应、交叉平衡体现的就是人机有机混合的过程。
人机混合知识表征方面主要的问题是:缺少能够将传感器数据与指挥员的知识混合、适应实际作战场景的弹性知识库。人类指挥员有完备的军事理论知识,如《战术学》《兵器学》及《地形学》等,对于组织准备、下定决心、火力准备以及实时作战行动都有特定的表征习惯。因此机器如果想要理解指挥员在特定任务场景下的语义表达,需要结合任务、敌情、战术、地形等因素自动分析,形成综合态势判断。不能基于传统的“编程思维”事先穷举所有因素,而是要对战场情况进行“感知、理解和学习”,使知识库具有弹性,能够进行更新迭代,解决人机战术知识中的一致性问题。
人机混合决策机制方面主要的问题是:缺少基于人机沟通的个性化智能决策机制。指挥员的风格千差万别,能够实现高效人机协作的智能系统一定是个性化的智能系统。“个性化”的智能系统不是简单的机器对指挥员习惯的适应和迁就,而是应该建立一种人机沟通的框架和机制。系统的决策建议有可能是对指挥员思路的补充,也有可能与指挥员的指挥风格完全相反,通过不断实践获得反馈,人机混合决策能力获得迭代发展,最终实现个性化的辅助决策系统,达到人与机器的最优匹配。
人工智能只是人类智能可描述化、可程序化的一部分,而人类的智能是人、机(物)、环境系统相互作用的产物。智能生成的机理,简而言之,就是人物(机属人造物)环境系统相互作用的叠加结果,由人、机器、各种环境的变化状态所叠加衍生出的形势、局势和趋势(简称势)共同构成,三者变化的状态有好有坏、有高有低、有顺有逆,体现智能的生成则是由人、机、环境系统态、势的和谐共振大小程度所决定的,三者之间具有建设性和破坏性干涉效应,或增强或消除,三位一体则智能强,三位多体则智能弱。如何调谐共频则是人机混合智能的关键。当代人工智能由最初的完全人工编译的机器自动化发展到了人工预编译的机器学习,接下来的发展可能是通过人机混合智能的方法来实现机器认知,最终实现机器觉醒。
总之,未来战场,对抗态势高度复杂、瞬息万变,多种信息交汇形成海量数据,仅凭人脑难以快速、准确处理,只有人机混合的运行方式,基于数据库、物联网等技术群,指挥员(人+机)才能应对瞬息万变的战场,完成指挥控制任务。随着无人系统自主能力的提升,人工智能集群功能的增强,自主决策逐步显现。一旦指挥系统实现不同功能的智能化,感知、理解、预测的时间将会大大压缩,效率明显提高。加上用于战场传感器图像处理的模式识别、用于作战决策的最优算法,将赋予指挥系统更加高级的决策能力,逐步实现人与机的联合作战。
人机混合智能是军事智能发展的必经之路,其中既包括理论方法,也包括对人、机、环境之间关系的探索。近年来,越来越多的人工智能武器融入战场环境,越来越多的人开始关注军事人机混合智能。但客观地看,当前的军事人机混合智能与我们的设想尚存一定距离,如何将人的智能迁移到机器中,仍需要智能科学家作进一步研究。军事人机混合智能研究不仅要考虑机器技术的高速发展,更要考虑交互主体——人类的思维与认知方式,让机器与人类各司其职、互相促进,这才是军事智能研究的前景与趋势。
六、人机混合智能的未来发展方向
人机混合智能有两大难点:理解与反思。人是弱态强势,机是强态弱势,人是弱感强知,机是强感若知。人机之间目前还未达到相声界一逗一捧的程度,因为还没有单向理解机制出现,能够幽默的机器依旧遥遥无期。乒乓球比赛中运动员的算到做到、心理不影响技术(想赢不怕输)、如何调度自己的心理(气力)生出最佳状态、关键时刻之心理的坚强、信念的坚定等等,这都是机器难以产生出来的生命特征物。此外,人机之间配合必须有组合预期策略,尤其是合适的第二第三预期策略。自信心是匹配训练出来的,人机之间信任链的产生过程常常时:从陌生-不信任-弱信任-较信任-信任-较强信任-强信任,没有信任就不会产生期望,没有期望就会人机失调,而单纯的一次期望匹配很难达成混合,所以第二、第三预期的符合程度很可能是人机混合一致性的关键问题。人机信任链产生的前提是人要自信(这种自信心也是匹配训练出来的),其次才能产生他信和信他机制,信他与他信里就涉及到多阶预期问题。若being是语法,should就是语义,二者中和相加就是语用,人机混合是语法与语义、离散与连续、明晰与粗略、自组织与他组织、自学习与他学习、自适应与他适应、自主化与智能化相结合的无身认知 + 具身认知共同体、算+法混合体、形式系统+非形式系统的化合物。反应时与准确率是人机混合智能好坏的重要指标。人机混合就是机机混合,器机理 + 脑机制;人机混合也是人人混合,人情意+人理智。
人工智能相对是硬智,人的智能相对是软智,人机智能的混合则是软硬智。通用的、强的、超级的智能都是软硬智,所以人机混合智能是未来,但是混合机理机制还远未搞清楚,更令人恍惚的是一不留神,不但人进化了不少,机又变化的太快。个体与群体行为的异质性,不仅体现在经济学、心理学领域,而且还是智能领域最为重要的问题之一。现在主流的智能科学在犯一个以前经济学犯过的错误,即把人看成是理性人,殊不知,人是活的人,智是活的智,人有欲望有动机有信念有情感有意识,而数学性的人工智能目前对此还无能为力。如何混合这些元素,使之从冰冻的生硬的状态转化为温暖的柔性的情形,应该是衡量智能是否智能的主要标准和尺度,同时这也是目前人工智能很难跳出人工的瓶颈和痛点,只有钢筋没有混凝土。经济学融入心理学后即可使理性经济人变为感性经济人,而当前的智能科学仅仅融入心理学是不够的,还需要渗入社会学、哲学、人文学、艺术学等方能做到通情达理,进而实现由当前理性智能人的状态演进成自然智能人的形势。智能中的意向性是由事实和价值共同产生出来的,内隐时为意识,外显时叫关系。从这个意义上说,数学的形式化也许会有损于智能,维特根斯坦认为:形式是结构的可能性。对象是稳定的东西,持续存在的东西;而配置则是变动的东西,非持久的东西。维特根斯坦还认为:我们不能从当前的事情推导出将来的事情。迷信恰恰是相信因果关系。也就是说,基本的事态或事实之间不存在因果关系。只有不具有任何结构的东西才可以永远稳定不灭、持续存在;而任何有结构的东西都必然是不稳定的,可以毁灭的。因为当组成它们的那些成分不再依原有的方式组合在一起的时候它们也就不复存在了。事实上,在每个传统的选择(匹配)背后都隐藏着两个假设:程序不变性和描述不变性。这两者也是造成期望效用描述不够深刻的原因之一。程序不变性表明对前景和行为的偏好并不依赖于推导出这些偏好的方式(如偏好反转),而描述不变性规定对被选事物的偏好并不依赖于对这些被选事物的描述。
人机混合智能难题,即机器的自主程度越高,人类对态势的感知程度越低,人机之间接管任务顺畅的难度也越大,不妨称之为“生理负荷下降、心理认知负荷增加”现象。如何破解呢?有经验的人常常抓关任务中的键薄弱环节,在危险情境中提高警觉性和注意力,以防意外,随时准备接管机器自动化操作,也可以此训练新手,进而形成真实敏锐地把握事故的兆头苗头、恰当地把握处理时机、准确地随机应变能力,并在实践中不断磨砺训练增强。即便如此,如何在非典型、非意外情境中解决人机交互难题仍需要进一步探讨!
计算与算计,合久必分,分久必合。算计需要的是发散思维,计算需要的是缜密思维,这是两种很不一样的思维方式,这两种方式同时发生在某个复杂过程中是小概率的事件,由此带来的直接后果就是,复杂领域的突破也只能是小概率的事件。对待场景中的变化,机器智能可以处理重复性相同的“变”,人类智能能够理解杂乱相似性(甚至不相似)的“变”,更重要的是还能够适时的进行“化”,其中“随动”效应是人类计算计的一个突出特点,另外,人类计算计还有一个更更厉害的武器——“主动”。
有人说:“自动化的最大悖论在于,使人类免于劳动的愿望总是给人类带来新的任务。”解决三体以上的科学问题是非常困难的,概念就是一个超三体的问题:变尺度、变时空、变表征、变推理、变反馈、变规则、变概率、变决策、变态势、变感知、变关系……犹如速度与加速度之间的关系映射一般,反映者智能的边界。有效概念的认知是怎样产生的,OODA还是OAOODDDAA?亦或是OA?这是一个值得思考的问题。多,意味着差异的存在;变,意味着非存在的有;复杂,意味着反直观特性;自组织/自相似/自适应/自学习/自演进/自评估意味着系统的智能……,人机环境网络中重要/不重要节点的隐匿与恢复是造成全局态势有无的关键,好的语言学家与好的数学家相似:少计算多算计,知道怎么做时计算,不知道怎么做时算计,算计是从战略到策略的多逻辑组合,人机混合计算计机制犹如树藤相绕的多螺旋结构,始于技术,成于管理。如果说计算是科学的,算计是艺术的,那么计算计就是科学与艺术的。【15】
价值不同于事实之处在于可以站在时间的另一端看待发生的各种条件维度及其变化。仅仅是机器智能永远无法理解现实,因为它们只操纵不包含语义的语法符号。系统论的核心词是突显(整体大于部分),偏向价值性should关系;控制论的核心词是反馈(结果影响原因),侧重事实性being作用。耗散结构论的核心词是开放性自组织(从非平衡到平衡),强调从being到should过程。控制论中的反馈是极简单的结果影响(下一个)原因的问题,距离人类的反思-这种复杂的“因果”(超时空情境)问题很遥远。算计是关于人机环境体系功能力(功能+能力)价值性结构谋划,而不是单事实逻辑连续的计算,计算-算计正是关于正在结构中事实-价值-责任-情感多逻辑组合连续处理过程,人机混合智能难题的实质也就是计算-算计的平衡。
人机混合智能是人工智能发展的必经之路,其中既需要新的理论方法,也需要对人、机、环境之间的关系进行新的探索。人工智能的热度不断加大,越来越多的产品走进人们的生活之中。但是,强人工智能依然没有实现,如何将人的算计智能迁移到机器中去,这是一个必然要解决的问题。我们已经从认知角度构建认知模型或者从意识的角度构建计算-算计模型,这都是对人的认知思维的尝试性理解和模拟,期望实现人的算计能力。计算-算计模型的研究不仅需要考虑机器技术的飞速发展,还要考虑交互主体即人的思维和认知方式,让机器与人各司其职,互相混合促进,这才是人机混合智能的前景和趋势。
未来的机器不但要服务于人,还要改造人,更重要的是与人合作。人机混合智能的关键在于新逻辑体系的建立,而不仅是现在数学的形式化计算方式。
矛盾与因果都是二元的极端,常常忽略了半矛盾与半因果(半真半假、半推半就),甚至其它百分率的相关逻辑关系,这样就造成了"与或非"逻辑的不全面及不完整,这也是计算智能之所以智障的根本所在!从而有必要产生"是非中"算计逻辑的尝试、调节与平衡,进一步完善人机混合智能中的计算-算计体系。把过去、当下和未来结合在一起做出选择,这种能力很可能是人和动物之间的一个比较大的差别。也是人机之间的差异所在,并且这些过去、当下、未来及其交互还是运动变化着的。另外人机之间的态空间、势空间、感空间、知空间、行空间常常随着时间而不一致。机器为实事求是,人为似事求是,甚至为非似事求是,基于客观的似,基于呈现的似,基于主观感知的似,基于非存在的似。“泛化”思想来源于“象”即意象、形象,也是从整体上认识事物。
人机之间主体、客体划分之外还有人们常常故意忽略的混体、动体或变体(主客体或客主体)。非此即彼的是非还原论是对现实系统观的无能为力。人类常常用相似对事实进行降维,计算计的关键在于是处理变体问题,其核心不是二元的“与或非”逻辑体系,而是加入了多颗粒度的“是非中”逻辑系统。计算对网格比较好用,算计对跳格相对较易(比如《亮剑》中的李云龙及其生活中的人物原型们),人类的智能不时会违反逻辑常识。
计算的逻辑与或非,大家比较熟悉与或非逻辑,不多赘述;算计的逻辑是非中,其中是偏同化、非侧顺应、中为平衡,当遇到问题时,先用是、再用非、后用中。大是大非时,大是不动,先试小非,再试中非,若不行,大非不动,先试小是,再试中是,这些试的过程就是“中”的平衡。“中”就是不断尝试、调整、平衡。以上就是计算-算计结合的逻辑体系,算计逻辑把握价值方向,计算逻辑细化事实过程。
马克吐温说过:“让你遇到麻烦的不是未知,而是你确信的事并非如你所想。”,人机混合智能走向未来,没有新逻辑也许就会没有灵魂,人工智能也是如此,新逻辑会产生新数学,新数学也许会产生新智能。
参考文献:
[1] 马克思.马克思恩格斯选集[M ]第1卷:56
[2] 郭雷. 系统科学进展2[M].科学出版社, 2019, 10:6
[3] Lecun Y, Bengio Y, Hinton G. Deep learning.[J]. Nature, 2015, 521(7553):436.
[4] Silver D , Huang A , Maddison C J , et al. Mastering the game of Go with deep neural networks and tree search[J]. Nature, 2016, 529(7587):484-489.
[5] Hinton G, Deng L, Yu D, et al. Deep Neural Networks for Acoustic Modeling in Speech Recognition: The Shared Views of Four Research Groups[J]. IEEE Signal Processing Magazine, 2012, 29(6):82-97.
[6] Collobert R , Weston J , Bottou L , et al. Natural Language Processing (Almost) from Scratch[J]. Journal of Machine Learning Research, 2011.
[7] Mica R. Endsley、Daniel J. Glrland. Situation Awareness Analysis and Measurement. Lawrence Erlbaum Associates, Inc, 2000:5-15
[8] Manuel B, Lenore B. A theoretical computer science perspective on consciousness.[J] Journal of Artificial Intelligence and Consciousness 8.01(2021):1-42.
[9] Samuel B. Wintermute. Abstraction, Imagery, and Control in Cognitive Architecture[D]. Michigan: University of Michigan,2010.
[10] Pat Langley, John E. Laird, Seth Rogers. Cognitive architectures: Research Issues and Challenges[J]. Cognitive Systems Research,2009,10(2):141-160.
[11] Wlodzislaw D, Richard J. Oentaryo, Michael P. Cognitive Architectures: Where do we go from here? [A]. In: Proceedings of the 2008 conference on Artificial General Intelligence[C]. Netherlands, 2008: 122-136.
[12] Baars, B. J. (1997). In the Theater of Consciousness: A rigorous scientific theory of consciousness. Journal of Consciousness Studies 4, No. 4, 292-309.
[13] 刘伟. 军事智能化的瓶颈和关键问题研究[J]. 学术前沿, 2021, 218(5):30-35
[14] 刘伟. 人机混合:超越人工智能[M].北京:清华大学出版社,2021.4
https://blog.sciencenet.cn/blog-40841-1390948.html
上一篇:人工智能研究是不是走错了方向
下一篇:再聊人机