博文
自动驾驶系统逻辑场景全覆盖测试用例生成方法
|
引用本文
闵海涛, 张志强, 范天昕, 张培兴, 张诚, 曲歌. 自动驾驶系统逻辑场景全覆盖测试用例生成方法. 自动化学报, 2026, 52(3): 441−450 doi: 10.16383/j.aas.c250347
Min Hai-Tao, Zhang Zhi-Qiang, Fan Tian-Xin, Zhang Pei-Xing, Zhang Cheng, Qu Ge. Full coverage test cases generating method for automated driving system in logical scenario. Acta Automatica Sinica, 2026, 52(3): 441−450 doi: 10.16383/j.aas.c250347
http://www.aas.net.cn/cn/article/doi/10.16383/j.aas.c250347
关键词
自动驾驶系统,测试场景,全覆盖测试,测试用例代表性
摘要
基于场景的测试方法是验证自动驾驶系统安全性的主流手段, 然而逻辑场景使用参数空间的形式对场景进行描述, 当被测系统性能存在差异时, 第三方检测机构难以使用同样的测试用例在保证测试公平性的同时兼顾测试覆盖率. 为此, 提出一种基于测试用例代表性的自动驾驶系统逻辑场景全覆盖测试用例生成方法. 首先建立自动驾驶系统全覆盖测试用例生成框架; 其次提出综合分析自然驾驶概率分布及危险情况的测试用例代表性量化评价方法; 最后开发一种基于热度驱动层次贪心算法和遗传算法的差异化样本组合空间全覆盖问题优化求解方法, 获取测试用例参数组合, 实现逻辑场景参数空间全覆盖. 使用前车切入场景对提出的方法进行验证. 结果表明, 提出的方法在逻辑场景参数空间覆盖率(100%)、测试边界拟合误差(0.08)方面均显著优于当前主流的蒙特卡洛方法(覆盖率84.3%、拟合误差0.19)与组合测试方法(覆盖率86.5%、拟合误差0.14), 可有效帮助检测机构建设公平、高效的测试场景生成框架.
文章导读
基于场景的测试方法已逐渐成为自动驾驶系统性能验证的主流[1], 其中逻辑场景使用参数空间对场景特征进行描述, 是场景库建设的主体, 亦是第三方检测机构定义测试范围的重要参照[2]. 然而在不同自动驾驶系统进行性能验证的过程中, 检测机构需要建立标准化、规范化的测试用例库以完成逻辑场景参数空间的测试[3]. 这种测试用例生成过程需要在保证测试公平性的同时兼顾测试覆盖率, 这一要求已经成为第三方测试的重要阻碍.
现有测试用例生成方法可概括为两种: 以发现被测系统性能边界为目标的在线优化方法和以预先生成测试用例库为目标的离线优化方法[4].
在线优化方法通过将被测自动驾驶系统嵌入仿真闭环中, 利用优化搜索、重要性采样等方式加速发现被测系统的性能边界. 例如同济大学提出基于改进优化算法的自动驾驶危险测试场景生成方法[5], Mullins等[6]提出自动驾驶系统逻辑场景危险边界搜索方法, 密歇根大学提出基于重要性采样的自动驾驶系统事故率加速测试方法[7]. 这些方法大多以优化算法为核心, 在测试过程中通过概率采样等手段实时生成场景参数, 测试过程存在较大的随机性, 不同自动驾驶系统由于性能的差异且测试过程所采样的测试用例参数存在较大不同[8], 导致测试过程难以满足第三方测试的公平性需求, 同时难以保证测试场景覆盖全部参数空间[9].
离线优化方法不考虑被测自动驾驶系统的性能差异, 以均匀采样或随机采样为核心, 生成相同的测试用例建立测试场景库进而完成测试过程, 可以满足第三方检测机构的公平性需求. 如赵文博[10] 提出基于组合测试的相机感知系统测试场景生成方法, Duan等[11] 提出基于复杂性组合测试的测试用例参数生成方法, Gambi等[12]提出基于蒙特卡洛的测试用例生成方法, Li等[13]提出基于拉丁超立方采样的测试用例生成方法. 这些方法虽然可以保证逻辑场景采样的公平性, 但方法通常需要预定义参数离散步长, 所选步长过大难以覆盖逻辑场景全部参数空间, 而所选步长过小则将生成过多测试用例导致测试过程效率低下[14].
针对现有方法存在的问题, 本文提出一种以场景代表性为核心的自动驾驶系统逻辑场景参数空间全覆盖测试方法. 该方法通过建立量化的测试用例代表性评估模型, 并开发对应的非均匀空间覆盖求解方案, 以少量测试用例实现逻辑场景参数空间的全覆盖, 从而兼顾测试过程公平性与测试效率.
本文首先提出基于场景代表性的自动驾驶系统逻辑场景全覆盖测试框架; 其次建立基于场景危险性和自然驾驶概率的场景代表性量化评价方法; 最后提出一种基于贪心算法的差异化样本组合空间全覆盖问题优化求解方法, 获取可覆盖全参数空间的最少数量测试用例组合. 使用前车制动场景、前车切入场景对本文提出的方法进行了验证. 结果表明, 本文提出的方法在逻辑场景参数空间覆盖率(100%)、测试边界拟合误差(0.08)方面均显著优于当前主流的蒙特卡洛方法(覆盖率84.3%、拟合误差0.19)与组合测试方法(覆盖率86.5%、拟合误差0.14).
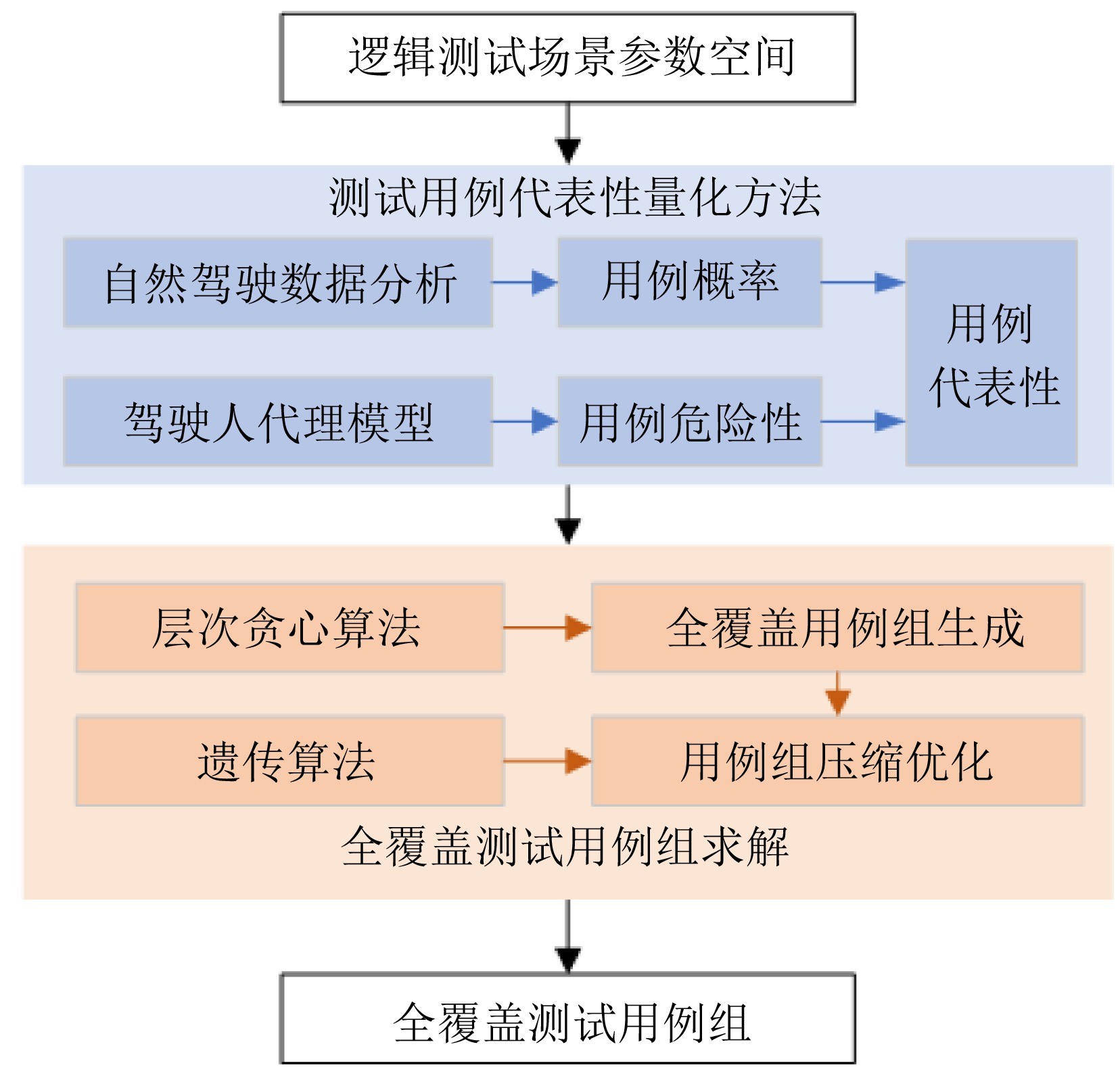
图1 全覆盖测试用例生成框架
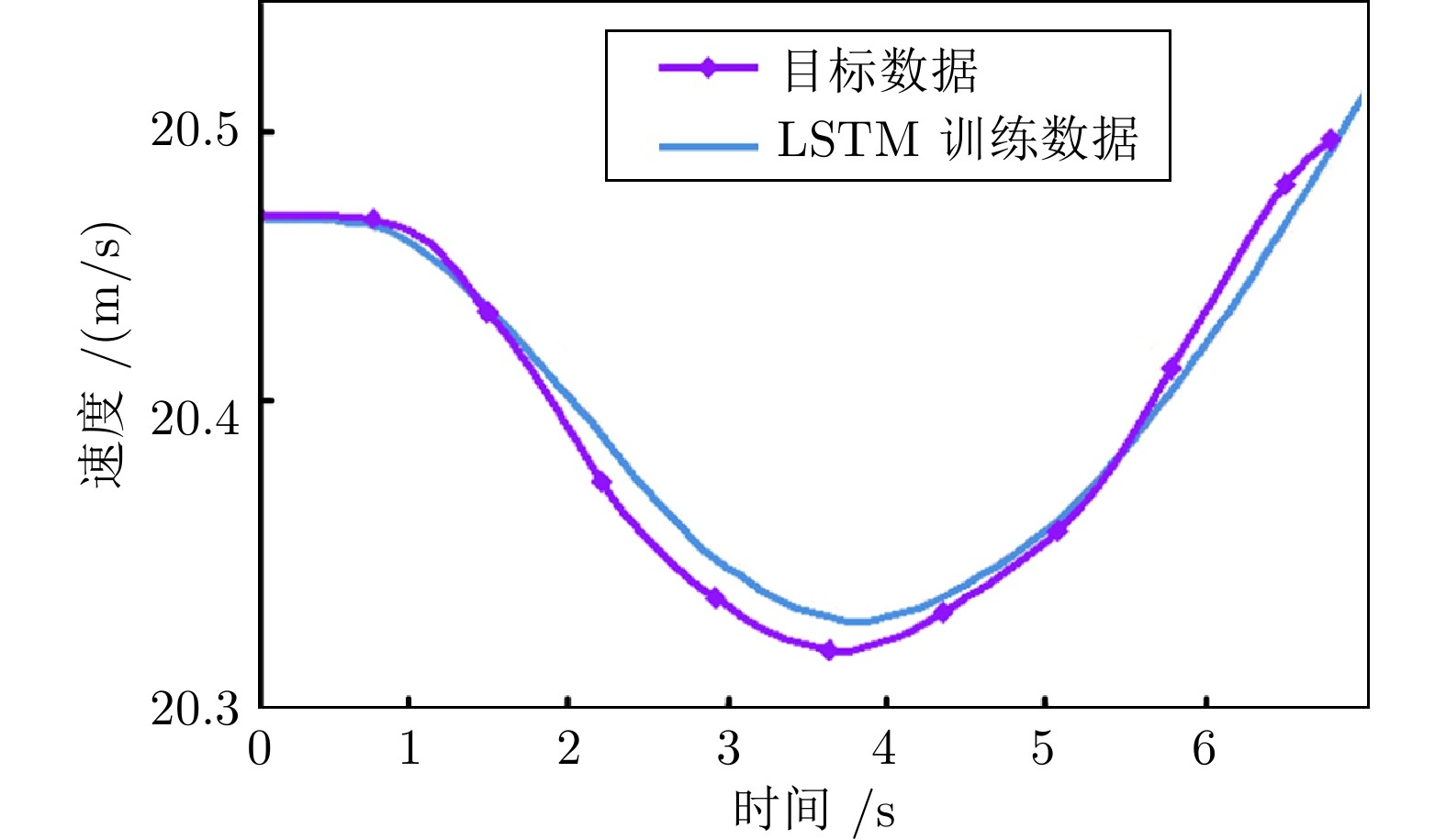
图2 纵向代理模型控制结果
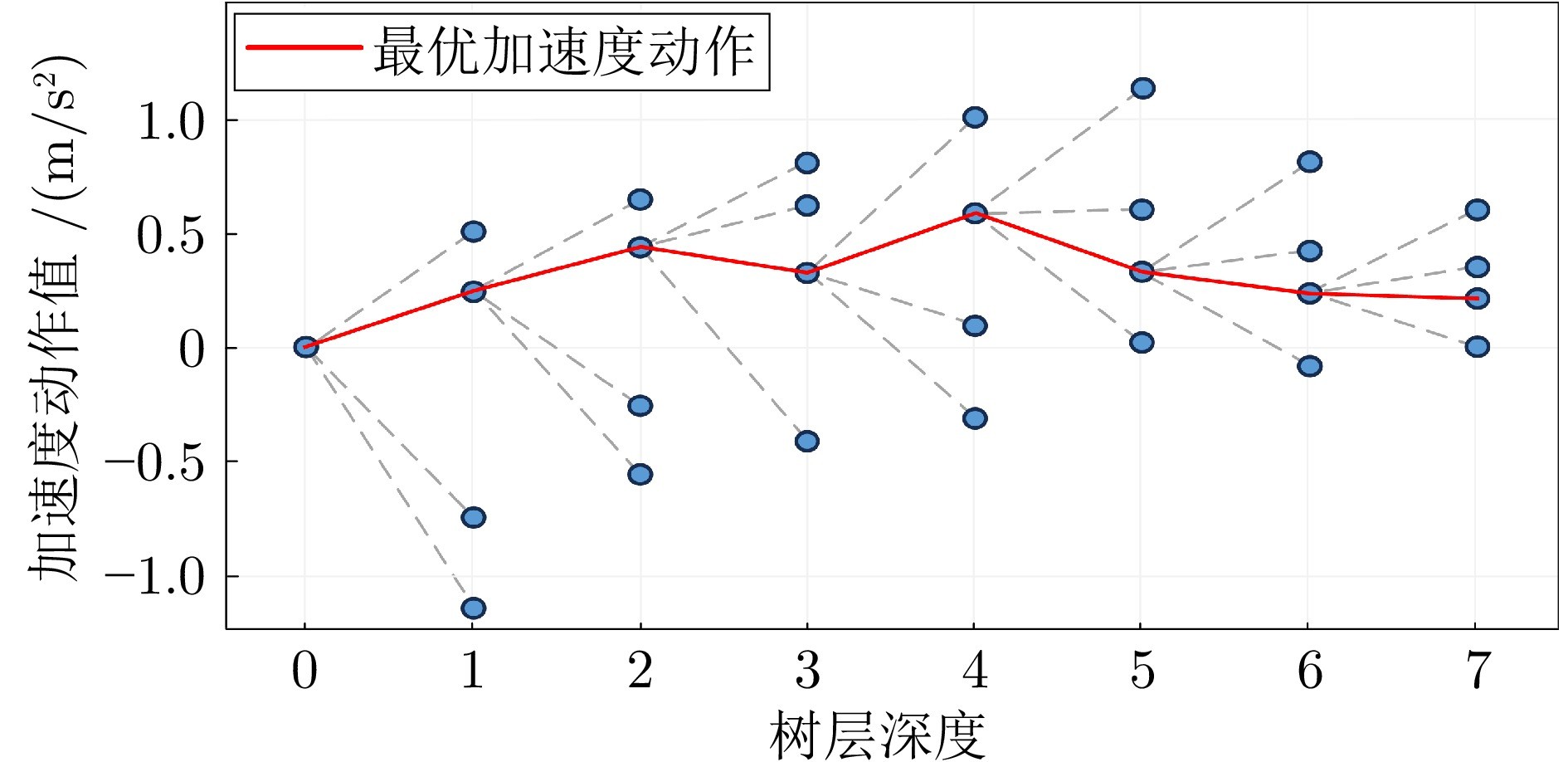
图3 MCTS搜索结果示意图
针对现有逻辑场景参数空间采样过程测试覆盖率低、测试公平性差的难题, 本文提出一种基于用例代表性的自动驾驶系统逻辑场景参数空间全覆盖测试用例生成方法. 其通过用例代表性量化评价、差异化样本组合空间全覆盖问题优化求解, 实现了少量测试用例对逻辑场景参数空间的全面覆盖. 使用前车切入场景对本文提出的方法进行对比实验, 验证了本文方法在测试场景生成覆盖率、测试效率、性能边界拟合精度方面的优势. 通过生成统一规范的测试用例库, 可以保证测试过程的公平性, 对第三方检测机构建立标准化测试场景具有重要的工程意义. 本文方法在理论上不依赖特定维度, 可通过要素权重调整与参数分区扩展至多车交互等高维场景, 但当前研究主要面向逻辑场景, 未涉及长时序连续交互场景. 未来将针对连续测试场景生成问题进一步拓展本文提出的场景代表性建模与全覆盖方法架构.
作者简介
闵海涛
吉林大学汽车底盘集成与仿生全国重点实验室教授. 主要研究方向为数据驱动的智能新能源汽车测试技术. E-mail: minht@jlu.edu.cn
张志强
吉林大学汽车底盘集成与仿生全国重点实验室博士研究生. 主要研究方向为基于场景的自动驾驶汽车加速测试与多维评价技术. E-mail: zhangzhiqiang@catarc.ac.cn
范天昕
吉林大学汽车底盘集成与仿生全国重点实验室博士研究生. 主要研究方向为数字–物理融合建模的自动驾驶汽车多平台联动加速测试技术. E-mail: fantx19@mails.jlu.edu.cn
张培兴
吉林大学汽车底盘集成与仿生全国重点实验室副教授. 主要研究方向为基于场景的自动驾驶汽车虚拟仿真加速测试与评价方法. 本文通信作者. E-mail: zhangpeixing@jlu.edu.cn
张诚
中汽研汽车检验中心(天津)有限公司高级工程师. 主要研究方向为基于场景的自动驾驶汽车加速测试评价技术. E-mail: zhangcheng@catarc.ac.cn
曲歌
中汽研汽车检验中心(天津)有限公司工程师. 主要研究方向为基于场景的自动驾驶汽车加速测试评价技术. E-mail: quge@catarc.ac.cn
https://blog.sciencenet.cn/blog-3291369-1531590.html
上一篇:融合形态特征的基于GRU的介入机器人导丝轨迹预测建模